一种多自由度腰髋部结构的双足机器人的制作方法
1.本实用新型涉及双足机器人领域,具体为一种多自由度腰髋部结构的双足机器人。
背景技术:
2.现今机器人技术愈加进步,在医疗康复、建筑和军工等领域对机器人的需求大大提高,由于双足机器人更加贴近人体结构,所以双足机器人的市场更加广泛。现有的许多双足机器人厂商多把研究重心放在动力优化和提高负载强度上,忽视了机器人的灵活性,许多机器人无法进行灵活和复杂的下肢动作。
3.申请号201610678285.3的发明公开了一种下肢外骨骼机器人,包括控制盒、背架、髋关节组件、大腿杆、膝关节组件、小腿杆、支撑足组件,该外骨骼的特点是刚度调节电机实时改变调节膝关节刚度,减少了地面振动冲击并减少了能源消耗,虽然膝关节处设计提高了柔顺性,但是髋部结构以刚性固定连接为主,部件结构自由度匮乏,腰髋部部件无法调节,下肢无法跟随扭动和侧抬腿,腿部动作被局限为单一的前后摆动,导致肢体活动十分生硬,行走不便,忽视了灵活性和舒适性。
4.申请号201910720196.4的发明公开了一种下肢外骨骼机器人,包括胸腹依靠板、左部和右部;左部和右部结构完全相同,均包括髋关节部分、踝关节部分、膝关节锁死部分、足底辅助支撑部分、大腿依靠板、小腿倚靠板和膝关节轴。该发明可实现在任意姿势为下肢提供稳定支撑,且具有良好的负载性能和持久的续航能力,同时也兼具高自由度的优点,但是结构过于复杂,进行复杂下肢动作时,各个结构之间也易发生干涉的现象,虽然已经做了简化设计,零部件过多的情况依旧存在,整机重量和体积依旧过大,活动时笨重的问题依旧没有很好的解决。
技术实现要素:
5.有鉴于此,本实用新型的目的在于提供一种多自由度腰髋部结构的双足机器人,可实现水平扭动腿部、前后腿部摆动和侧抬腿或并拢腿部等动作,还可实现腿部间距的调整。
6.为解决以上技术问题,本实用新型提供一种多自由度腰髋部结构的双足机器人,包括腰髋部结构,包括具有至少三个自由度,该三个自由度分别对应第一转动轴线、第二转动轴线和第三转动轴线;第一转动轴线、第二转动轴线和第三转动轴线两两相互垂直或两两相互近似垂直;第一转动轴线、第二转动轴线和第三转动轴线在空间中相交于一点或近似相交于一点;
7.还包括包裹佩戴者腰部的腰板承力部,所述第一转动轴线位于所述腰板承力部正下方的空间内;
8.所述第一转动轴线与所述第二转动轴线不相交,所述第二转动轴线和第三转动轴线相交于第一点且共同位于一平面内,所述第一转动轴线和第三转动轴线不相交。
9.作为进一步地优选技术方案,所述一点可与所述佩戴者的髋关节重合或近似重合。
10.作为进一步地优选技术方案,所述第一转动轴线、第二转动轴线和第三转动轴线近似相交于一点,则一点与第一转动轴线、第二转动轴线和第三转动轴线任一者之间的最小距离小于或等于3cm。
11.作为进一步地优选技术方案,还包括具有第一转动轴线的腰板承力件、具有第二转动轴线的下肢承力件和具有第三转动轴线的下肢连接件,所述下肢连接件和下肢承力件可跟随腰板承力件绕第一转动轴线转动,所述下肢连接件可跟随下肢承力件绕第二转动轴线转动。
12.作为进一步地优选技术方案,还包括背部支架和下肢结构;
13.所述腰板承力部为背部支架的一部分;
14.所述腰板承力件为背部支架的一部分;
15.所述腰板承力件为所述腰板承力部的一部分;
16.所述下肢承力件为下肢结构的一部分;
17.所述下肢连接件为下肢的一部分。
18.作为进一步地优选技术方案,所述腰板承力部包括一调节机构,,所述调节机构具体为滑槽滑块机构,滑块与腰板承力件一端铰接连接,使得腰板承力件跟随滑块水平方向可移动而形成有一移动副,下肢连接件和下肢承力件可跟随腰板承力件水平移动。
19.作为进一步地优选技术方案,所述腰板承力件呈l型,所述腰板承力件水平弯折前伸环绕于腰部两侧,使得下肢摆动轨迹所在的平面无法与所述腰板承力部发生干涉。
20.作为进一步地优选技术方案,所述腰板承力部包括一第一限位块;
21.所述第一限位块为u型结构,所述第一限位块的u型开口端固定连接于腰板承力部一侧,所述第一限位块的套接于腰板承力件外端并将其包覆,用以限制所述腰板承力件的回转角度。
22.作为进一步地优选技术方案,所述下肢承力件上端设置有第二限位件,所述第二限位件为u型结构,所述第二限位件的u型开口处套于腰板承力件一端上,所述第二限位件另一端与所述下肢连接件的一端铰接连接,所述第二限位件用于限制所述下肢和所述下肢连接件形成的整体的转动角度。
23.与现有技术相比,本实用新型的实施例的有益效果有:
24.腰髋部结构拥有至少三个转动自由度:下肢连接件控制下肢的前后回转,可实现下肢前后摆动踢腿动作;所述下肢承力件控制下肢绕腿轴水平回转,实现扭动腿部的动作;整个下肢结构围绕着腰板承力件回转,实现侧抬腿动作和腿部并拢动作。
25.腰板承力件呈l型,水平弯折前伸环绕于所述腰部本体两侧,下肢摆动轨迹所在的平面不会与腰部本体发生干涉;腰板承力部设有一调节机构,可实现左右腿部的腿间距的调节;腰板承力件上包覆有限位块以及下肢承力件的u型限位设计,可防止下肢活动角度超过人体极限造成伤害;本实用新型结构简单,体积小巧,重量轻盈,大大提高下肢运动的灵活性。
附图说明
26.图1为本实用新型的实施例的多自由度腰髋部结构的双足机器人的腰髋部立体结构示意图;
27.图2为本实用新型的实施例的多自由度腰髋部结构的双足机器人的整体立体结构示意图;
28.图3为本实用新型的实施例的多自由度腰髋部结构的双足机器人的背部支架正视立体结构示意图;
29.图4为本实用新型的实施例的多自由度腰髋部结构的双足机器人的背部支架后视立体结构示意图;
30.图5为本实用新型的实施例的多自由度腰髋部结构的双足机器人的下肢结构部分立体结构示意图;
31.图6为本实用新型的实施例的多自由度腰髋部结构的双足机器人的下肢结构部分侧视立体结构示意图;
32.图7为本实用新型的实施例的多自由度腰髋部结构的双足机器人的三个转动轴线相交于一点的下肢承力件立体结构示意图;
33.图8为本实用新型的实施例的多自由度腰髋部结构的双足机器人的三个转动轴线近似相交于一点髋部结构立体结构示意图;
34.图9为本实用新型的实施例的多自由度腰髋部结构的双足机器人的三个转动轴线近似相交于一点髋部结构另一立体结构示意图。
具体实施方式
35.为了使本实用新型实施例所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合图1至图9及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
36.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者间接在该另一个元件上。当一个元件被称为是“连接”另一个元件,它可以是直接连接到另一个元件或间接连接至该另一个元件上。另外,连接即可以是用于固定作用也可以是用于电路连通作用。
37.需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”“左”“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型实施和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
38.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多该特征。在本实用新型实施例的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
39.本实施例提供一种多自由度腰髋部结构的双足机器人,用于实现侧抬腿、水平扭腿、前后踢摆腿以及调整腿距的动作,提高灵活性,以符合人体运动学。
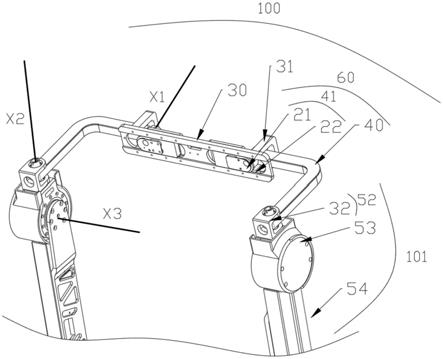
40.参见图1和2,本实施例的双足机器人具有背部支架102、腰髋部结构100和下肢结
构101,使得穿戴者腰部具有适应人体运动力学的多自由度,行动灵敏,反应快捷,舒适度较高。
41.参见图1-9,腰髋部结构具有三个自由度,该三个自由度分别对应第一转动轴线x1、第二转动轴线x2和第三转动轴线x3。腰髋部结构100包括一包裹佩戴者腰部的腰板承力部60,腰板承力部60为背部支架103的一部分,腰板承力部60包括腰板承力件40,腰板承力件40为背部支架103的一部分,腰板承力件40为腰髋部结构100的一部分,腰板承力件40具有第一转动轴线x1,第一转动轴线x1位于腰板承力部60正下方的空间内;下肢结构101的上部包括一下肢承力件52,下肢承力件52具有第二转动轴线x2;下肢结构101的下部包括一下肢54,所述下肢54上端铰接连接有一下肢连接件53,所述下肢连接件53的上端与下肢承力件52的底端固定连接,下肢连接件53具有第三转动轴线x3,第一转动轴线x1、第二转动轴线x2和第三转动轴线x3两两相互近似垂直,参见图7,如图7所示,第一转动轴线x1、第二转动轴线x2和第三转动轴线x3在空间中相交于第一点o,参见图8,如图8所示,腰板承力件40、下肢承力件52和下肢连接件53几乎都处于同一点配合,由于零部件依然存在体积上的影响以及零部件运动时互相干涉的影响,仍然无法完全将三个转动轴线完全交于同一点,因此参见图9,如图9所示,第一转动轴线x1、第二转动轴线x2和第三转动轴线x3在空间中近似相交于一点,第一转动轴线x1与第二转动轴线x2不相交,第二转动轴线x2和第三转动轴线x3相交于一点m且共同位于一平面内,第一转动轴线x1和第三转动轴线x3不相交,腰板承力件40呈l型,腰板承力件40水平弯折前伸环绕于腰部两侧,使得腰部承力件40具有的第一转动轴线x1位于腰髋部结构100的后侧腰部位置,且下肢承力件52和下肢连接件53连接点点m可与佩戴者的髋关节重合或近似重合,使得下肢54摆动轨迹所在的平面无法与腰板承力部60发生干涉,符合人体运动学构造,考虑到部件间体积的影响以及防止运动时互相干涉的影响,则一点m与第一转动轴线x1、第二转动轴线x2和第三转动轴线x3任一者之间的最小距离小于或等于3cm;下肢54可绕着下肢连接件53具有的第三转动轴线x3转动,实现下肢54的前后摆动,下肢连接件53可跟随下肢承力件52绕第二转动轴线x2转动,实现下肢54的水平扭动,下肢连接件53和下肢承力件52可跟随腰板承力件40绕第一转动轴线x1转动,实现下肢54的侧向摆动。值得说明的是,本实施例的方案并不限于该种一种。
42.参见图1、3、4、5和6,腰板承力部60包括一调节机构41,调节机构41具体为滑槽滑块机构,滑块21与腰板承力件40一端铰接连接,使得腰板承力件40跟随滑块21水平方向可移动而形成有一移动副,下肢连接件53和下肢承力件52可跟随腰板承力件52水平移动,可调节下肢54的间距。
43.参见图1、3、4、5和6,腰板承力部60还包括一第一限位块31,第一限位块31为u型结构,第一限位块31的u型开口端固定连接于腰板承力部60一侧,第一限位块31的套接于腰板承力件40外端并将其包覆,用以限制腰板承力件40的回转角度,可防止下肢54活动角度超过人体极限而对人体造成伤害。
44.参见图1、3、4、5和6,腰板承力件40外端与下肢承力件52铰接连接,下肢承力件52上端设置有第二限位件32,第二限位件32为u型结构,第二限位件32的u型开口处套于腰板承力件40外端上,第二限位件32另一端与下肢连接件53的上端铰接连接,第二限位件32用于限制下肢54和下肢连接件53形成的整体的转动角度,防止髋部扭动超过人体极限导致用户受伤。
45.本多自由度腰髋部结构的双足机器人的髋部结构100具有的三个转动自由度可实现人体腿部的前后踢腿,侧抬腿、腿部并拢、水平扭腿等动作,腰板承力部60处水平方向形成的移动副可实现两腿间距的调节,第一限位件31和第二限位件32的设计,限制了各个关节的活动角度,对使用者起到了更好的保护效果,本实用新型基本满足人体腰髋部自如灵活运动的所有需求。
46.以上仅是本实用新型的优选实施方式,本实用新型的保护范围以权利要求所限定的范围为准,本领域技术人员在不脱离本实用新型的精神和范围内做出的若干改进和润饰,也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1