一种单节五轴伺服机械手总装的制作方法
1.本实用新型涉及机械手技术领域,具体为一种单节五轴伺服机械手总装。
背景技术:
2.机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点。它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
3.然而在机械手进行使用时对于不同的零件不方便进行夹持,在运送时容易掉落,同时金属制成的夹持爪在使用时容易刮花零件,导致加工较为不便,同时不方便根据不同尺寸的零件进行更换机械手,导致使用较为不便。
4.针对上述问题。为此,提出一种单节五轴伺服机械手总装。
技术实现要素:
5.本实用新型的目的在于提供一种单节五轴伺服机械手总装,在使用机械手本体辅助加工时,可使用夹持单元a和夹持单元b辅助夹持零件,在使用时可通过充气口对调节空腔进行充气,由于限制件的设置,硅胶制成的夹持爪可绕着限制件向内进行收拢,进而使四个夹持爪同时向内收拢,进而将零件夹持住,机械手本体进行运送,方便进行后续加工,从而解决了上述背景技术中的问题。
6.为实现上述目的,本实用新型提供如下技术方案:一种单节五轴伺服机械手总装,包括固定底座和安装在固定底座上端的机械手本体,机械手本体的上端设置有夹持箱,所述夹持箱的侧面设置有夹持单元a和夹持单元b,夹持单元a和夹持单元b通过固定单元安装在夹持箱内部;
7.所述夹持单元a包括安装件和安装在安装件一侧的夹持爪,夹持爪的内部设置有摩擦垫。
8.优选的,所述夹持爪的内腔开设有调节空腔,夹持爪的一侧设置有限制件。
9.优选的,所述夹持单元a设置有两组,且分别活动安装在夹持箱的两侧。
10.优选的,所述夹持爪设置有四组,夹持爪为一种弹性硅胶材料制成的部件。
11.优选的,所述夹持单元a和夹持单元b为相同结构的部件,但夹持单元b内部的摩擦垫设置在夹持爪的外侧。
12.优选的,所述安装件的一侧设置有连接管,连接管的外侧设置有卡合槽,连接管的内侧设置有充气口,充气口与调节空腔相连通。
13.优选的,所述固定底座的一侧设置有控制单元,固定底座上端设置的机械手本体各个节点间活动连接。
14.优选的,所述固定单元包括锥形齿轮a和安装在锥形齿轮a一侧的锥形齿轮b,锥形
齿轮b的两侧设置有固定安装的连接杆,连接杆的一端均设置有锥形齿轮c,锥形齿轮c的一侧啮合安装有锥形齿轮d,锥形齿轮d的一侧设置有固定安装的调节螺杆,调节螺杆的上端设置有卡口a和卡口b。
15.优选的,所述卡口a和卡口b为两个半圆形的部件,且分别与两侧的调节螺杆螺纹连接,调节螺杆上端的螺纹设置有两段,且螺纹方向相反。
16.与现有技术相比,本实用新型的有益效果如下:
17.1、本实用新型提出的一种单节五轴伺服机械手总装,在使用机械手本体辅助加工时,可使用夹持单元a和夹持单元b辅助夹持零件,在使用时可通过充气口对调节空腔进行充气,由于限制件的设置,硅胶制成的夹持爪可绕着限制件向内进行收拢,进而使四个夹持爪同时向内收拢,进而将零件夹持住,机械手本体进行运送,方便进行后续加工,同时摩擦垫的设置可防止零件掉落,弹性设置的夹持爪可避免硬性接触使零件变形或是刮花,使用更加安全。
18.2、本实用新型提出的一种单节五轴伺服机械手总装,在针对不同的零件加工时,可将硅胶制成的夹持单元a和夹持单元b进行更换,在安装新的夹持单元a和夹持单元b时,可转动锥形齿轮a,使锥形齿轮a带动锥形齿轮b进行旋转,进而锥形齿轮c带动锥形齿轮d进行旋转,同时调节螺杆进行旋转,上端安装的卡口a和卡口b张开,将夹持单元a和夹持单元b安装完毕后,再次将卡口a和卡口b转回,将卡合槽固定住,进而将夹持单元a和夹持单元b固定住,同时将充气口卡住,避免在充气时漏气,更换简单,灵活性更强。
附图说明
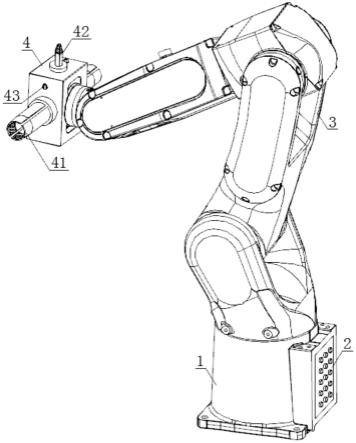
19.图1为本实用新型的整体结构示意图;
20.图2为本实用新型的夹持单元a结构示意图;
21.图3为本实用新型的夹持爪内部结构示意图;
22.图4为本实用新型的连接管结构示意图;
23.图5为本实用新型的固定单元结构示意图。
24.图中:1、固定底座;2、控制单元;3、机械手本体;4、夹持箱;41、夹持单元a;411、安装件;412、夹持爪;4121、调节空腔;4122、限制件;413、摩擦垫;414、连接管;415、充气口;416、卡合槽;42、夹持单元b;43、固定单元;431、锥形齿轮a;432、锥形齿轮b;433、连接杆;434、锥形齿轮c;435、锥形齿轮d;436、调节螺杆;437、卡口a;438、卡口b。
具体实施方式
25.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
26.为了解决如何方便机械手本体3辅助零件加工的技术问题,如图1-4所示,提供以下优选技术方案:
27.一种单节五轴伺服机械手总装,包括固定底座1和安装在固定底座1上端的机械手本体3,固定底座1的一侧设置有控制单元2,固定底座1上端设置的机械手本体3各个节点间
活动连接,机械手本体3的上端设置有夹持箱4。
28.夹持箱4的侧面设置有夹持单元a41和夹持单元b42,夹持单元a41设置有两组,且分别活动安装在夹持箱4的两侧,夹持单元a41和夹持单元b42通过固定单元43安装在夹持箱4内部。
29.夹持单元a41包括安装件411和安装在安装件411一侧的夹持爪412,夹持爪412设置有四组,夹持爪412为一种弹性硅胶材料制成的部件,夹持爪412的内腔开设有调节空腔4121,夹持爪412的一侧设置有限制件4122,夹持爪412的内部设置有摩擦垫413。
30.夹持单元a41和夹持单元b42为相同结构的部件,但夹持单元b42内部的摩擦垫413设置在夹持爪412的外侧。
31.安装件411的一侧设置有连接管414,连接管414的外侧设置有卡合槽416,连接管414的内侧设置有充气口415,充气口415与调节空腔4121相连通。
32.具体的,在使用机械手本体3辅助加工时,可使用夹持单元a41和夹持单元b42辅助夹持零件,在使用时可通过充气口415对调节空腔4121进行充气,由于限制件4122的设置,硅胶制成的夹持爪412可绕着限制件4122向内进行收拢,进而使四个夹持爪412同时向内收拢,进而将零件夹持住,机械手本体3进行运送,方便进行后续加工,同时摩擦垫413的设置可防止零件掉落,弹性设置的夹持爪412可避免硬性接触使零件变形或是刮花,使用更加安全。
33.为了解决如何方便更换夹持单元a41和夹持单元b42的技术问题,如图1和图4-5所示,提供以下优选技术方案:
34.固定单元43包括锥形齿轮a431和安装在锥形齿轮a431一侧的锥形齿轮b432,锥形齿轮b432的两侧设置有固定安装的连接杆433,连接杆433的一端均设置有锥形齿轮c434,锥形齿轮c434的一侧啮合安装有锥形齿轮d435,锥形齿轮d435的一侧设置有固定安装的调节螺杆436,调节螺杆436上端的螺纹设置有两段,且螺纹方向相反,调节螺杆436的上端设置有卡口a437和卡口b438,卡口a437和卡口b438为两个半圆形的部件,且分别与两侧的调节螺杆436螺纹连接。
35.具体的,在针对不同的零件加工时,可将硅胶制成的夹持单元a41和夹持单元b42进行更换,在安装新的夹持单元a41和夹持单元b42时,可转动锥形齿轮a431,使锥形齿轮a431带动锥形齿轮b432进行旋转,进而锥形齿轮c434带动锥形齿轮d435进行旋转,同时调节螺杆436进行旋转,上端安装的卡口a437和卡口b438张开,将夹持单元a41和夹持单元b42安装完毕后,再次将卡口a437和卡口b438转回,将卡合槽416固定住,进而将夹持单元a41和夹持单元b42固定住,同时将充气口415卡住,避免在充气时漏气,更换简单,灵活性更强。
36.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
37.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修
改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1