一种多自由度机器人的制作方法
1.本发明涉及自动化机器人,特别是涉及一种具有多个运动自由度的机器人。
背景技术:
2.随着自动化技术的不断发展,自动机器人被应用至各行各业。如在医疗行业中,眼科手术机器人就是一种新型的医疗器械,其能协助医生完成白内障、眼底黄斑、视网膜、青光眼等眼科手术。现有机器人在进行rcm(remotecenterofmotion,远端运动中心)运动时往往容易受到机器人初始姿态的限制而导致rcm运动受限、rcm运动范围过小,不适合应用于需要机器人rcm运动的场景。而目前根据眼科手术的动作特点而设计的可以进行rcm运动的串并联眼科手术机器人多为三自由度平行四边形结构,其rcm定点是机械式的定点,通过特定的平行四边形结构让机器人末端围绕一个rcm定点运动。由于是机械式的定点,一旦结构确定就无法改变机器人的rcm点的位置,而且机器人无法进行rcm运动以外的动作,使用的局限性很大。由于眼科手术中的rcm点是位于眼表隧道口的位置,机器人在进入眼内前必须把器械末端rcm点移动到眼表的隧道,而受限于机械式的定点,必须使用辅助设备通过移动机器人本体来将机器人的末端定点移动到隧道口,这种方法第一对辅助设备的要求很高,需要精确平稳的将机器人移动到需要的位置,否则机器人rcm的定点位置不对在手术过程中可能会导致器械对隧道的牵拉从而加大对眼球的损伤影响手术效果;第二由于需要把器械末端定点移动到眼表的隧道,与眼球的距离几乎为零,对操作失误的容错率很低。
技术实现要素:
3.本发明的目的在于提供一种方便调节rcm点位置的多自由度机器人,以提高定位精度和工作稳定性。
4.本发明所述的多自由度机器人,包括依次设置的第一关节座、第二关节座和第三关节座,相邻关节座之间分别安装有自由度调节机构;所述自由度调节机构包括在其中一个关节座上并列设置的两个直线电机,和在相邻关节座上固定设置的固定块和导轨,导轨上可移动地安装有滑块,两个直线电机分别通过连接块与固定块和滑块铰接,且两铰接端相互平行并相对导轨垂直;第三关节座上也安装有直线电机,且各个关节座上的直线电机相互垂直设置。
5.所述的多自由度机器人,第三关节座上设置有末端导轨和沿末端导轨移动的末端滑块,末端滑块上固定安装有装拆机构,装拆机构可装拆地连接操作器具,如手术操作中的针筒、绘画操作中的画笔等。
6.所述的多自由度机器人,第一关节座上安装有调节重心的配重机构,包括两块分别铰接于第一关节座上的固定板,其中一块固定板上设有垂直设置的滑轨和沿滑轨移动的滑轨块,配重块连接滑轨块并与另一块固定板固定连接。
7.本发明所述的多自由度机器人,第一关节座、第二关节座和第三关节座组成三个可相对运动的机械关节,以三个依次设置的关节座进行排序,前面两个关节座上均设有带
动后一个关节座移动的自由度调节机构;该机构中,两个直线电机并列设置且分别通过固定块和滑块与后一个关节座铰接,当两个直线电机同步运动时,它们组成的输送为线性运动,可以带动后一个关节座沿直线移动,而当两个直线电机作异步运动时,它们即输出为旋转运动,从而带动后一个关节座转动,且通过控制两个直线电机的移位差可以构成不同的旋转角度,以满足定位需要;而另一方面,第三关节座通过直线电机连接机器人的操作末端,如医疗机器人中的手术器具,通过直线电机带动操作器具作直线移动。该多自由度机器人通过两个并列设置直线电机的不同运动方式提供线性输出或旋转输出,并通过不同关节座之间相互垂直的直线电机而带动操作末端移动,从而使操作末端可以实现多自由度的运动,且其运动精度高,运动过程中的平稳性好,可极大地提高机器人的定位精度,满足工作所需;同时,机器人在运动过程中,通过配重机构可以平衡第二关节座和第三关节座之间的重力,避免第一关节座上的直线电机受到超出负荷的扭转力矩,从而提高直线电机乃至整个机器人的使用安全性和使用寿命。
附图说明
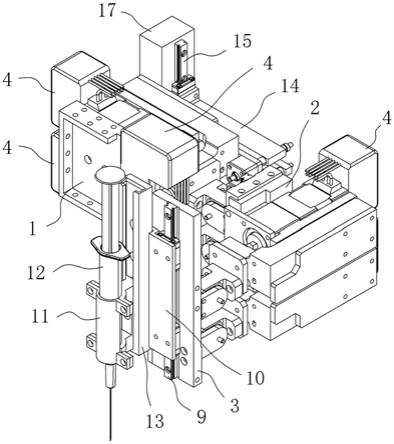
8.图1是多自由度机器人的结构示意图。
9.图2是多自由度机器人的侧视结构示意图。
10.图3是第一关节座及安装于其上零部件的结构示意图。
11.图4是第二关节座和第三关节座的连接结构示意图。
12.图5是多自由度机器人的工作状态结构示意图。
具体实施方式
13.一种多自由度机器人,包括依次设置的第一关节座1、第二关节座2和第三关节座3,相邻关节座之间分别安装有自由度调节机构;所述自由度调节机构包括在其中一个关节座上并列设置的两个直线电机4,和在相邻关节座上固定设置的固定块5和导轨6,导轨上可移动地安装有滑块7,两个直线电机分别通过连接块8与固定块和滑块铰接,且两铰接端相互平行并相对导轨垂直;第三关节座上也安装有直线电机,且各个关节座上的直线电机相互垂直设置;另外,第三关节座3上设置有末端导轨9和沿末端导轨移动的末端滑块10,末端滑块上固定安装有装拆机构11,装拆机构可装拆地连接操作器具12,如手术操作中的针筒、绘画操作中的画笔等;所述装拆机构11为夹具,其结构简单且操作方便;除此之外,末端滑块10上安装有带有滑槽的槽板13,装拆机构11可移动地安装于槽板上,以便于调节装拆机构及其上操作器具与第三关节座的相对位置,从而满足具体的工作所需。
14.所述的多自由度机器人,第一关节座1上安装有调节重心的配重机构,包括两块分别铰接于第一关节座1上的固定板14,其中一块固定板上设有垂直设置的滑轨15和沿滑轨移动的滑轨块16,配重块17连接滑轨块并与另一块固定板固定连接。
15.如图1-4所示,第一关节座、第二关节座和第三关节座组成三个可相对运动的机械关节,以三个依次设置的关节座进行排序,前面两个关节座上均设有带动后一个关节座移动的自由度调节机构;该机构中,两个直线电机并列设置且分别通过固定块和滑块与后一个关节座铰接,当两个直线电机同步运动时,它们组成的输送为线性运动,可以带动后一个关节座沿直线移动,而当两个直线电机作异步运动时,它们即输出为旋转运动,从而带动后
一个关节座转动,如图5所示,且通过控制两个直线电机的移位差可以构成不同的旋转角度,以满足定位需要;而另一方面,第三关节座通过直线电机连接机器人的操作末端,如医疗机器人中的手术器具,通过直线电机带动操作器具作直线移动。
16.所述的多自由度机器人,第一关节座1和第二关节座上分别固定安装有两块电机固定板18,两个直线电机4分别固定于第一关节座/第二关节座和两块电机固定板上,以提高直线电机的安装稳定性和各零部件之间的连接强度。而第三关节座3上固定安装有末端固定板19,直线电机4固定安装于第三关节座和末端固定板上,且该末端固定板19的两个相邻侧面处分别设置有末端导轨9,末端滑块10同时连接两根末端导轨,以提高末端滑块及其上操作器具的移动稳定性。
17.该多自由度机器人通过两个并列设置直线电机的不同运动方式提供线性输出或旋转输出,并通过不同关节座之间相互垂直的直线电机而带动操作末端移动,从而使操作末端可以实现多自由度的运动,且其运动精度高,运动过程中的平稳性好,可极大地提高机器人的定位精度,满足工作所需;同时,机器人在运动过程中,通过配重机构可以平衡第二关节座和第三关节座之间的重力,避免第一关节座上的直线电机受到超出负荷的扭转力矩,从而提高直线电机乃至整个机器人的使用安全性和使用寿命。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1