一种具有适应性的气囊充气式爬杆机器人
1.本发明涉及一种具有适应性的气囊充气式爬杆机器人,属于特种机器人领域。
背景技术:
2.近年来,随着社会的发展,机器人已经逐步走向社会的各个领域,其中高处作业已经是机器人目前需要面临的一个难点,例如高层管道维修,高层管道侦查,高层管道清洗喷绘等等,这些作业对机器人来说都是一个巨大的挑战,对机器人的自身结构、负载、体积等都有严格的要求,爬杆机器人的发展对于未来工业化还是城市化的发展都有巨大的影响力,同时也是一个具有创新性的机器人发展领域。
3.就现有的爬杆机器人而言,大多采用刚性抱取杆,不能够根据不同形状、不同粗细的杆进行选择,适应性不强,同时刚性抱取会造成杆状一定程度的磨损,没有缓冲,采用刚性挤压力调节来调整机器人的负载,不能够广泛的应用到我们的生活和目前的工业当中,导致很多的高层作业依然采用人工,一旦发生掉落,就会造成安全事故。
4.综上所述,现有技术中的爬杆机器人具有灵活度低、适应性差、调节能力差、不易于推广的诸多缺点。
技术实现要素:
5.本发明提供了一种具有适应性的气囊充气式爬杆机器人,以用于适应不同的杆并抱杆行走。
6.本发明的技术方案是:一种具有适应性的气囊充气式爬杆机器人,包括组装式机架、充气装置部分、移动组件部分,移动组件部分包括柔性连接机构、电机模块;组装式机架用于安装柔性连接机构,充气装置部分用于给柔性连接机构提供动力,通过柔性连接机构与电机模块共同配合用于抱杆行走。
7.所述组装式机架包括第一机架1、第二机架2,通过第一机架1、第二机架2拼接成适配杆外形的框架,拼接处铰接。
8.所述第一机架1、第二机架2两者的数量之和为n,则移动组件部分的数量为n。
9.所述第一机架1用于与第二机架2连接处为矩形,所述第二机架2用于与第一机架1连接处为不规则形。
10.所述充气装置部分包括充气泵3;其中,充气泵3与组装式机架固定连接,通过气管与柔性连接机构中的气囊6导通,通过充气泵3的充气作用对气囊6进行充气。
11.所述柔性连接机构包括弹簧组4、连接板5、气囊6、滑轨7、滑块8;其中,连接板5一侧中间与组装式机架之间安装气囊6,连接板5另一侧用于安装电机模块;弹簧组4包括弹簧,弹簧呈对称安装在连接板5一侧的两端,弹簧一端与组装式机架连接,弹簧另一端与连接板5一侧进行固定连接,连接板5上下安装有滑块8,通过滑块8与安装在组装式机架上的滑轨7进行滑动配合。
12.所述电机模块包括电机10、电机座9、法兰轴12、深沟球轴承11、轮式机构13;其中,
用于固定电机10的电机座9与柔性连接机构中连接板5固定连接,穿过嵌套在电机座9对应的槽内深沟球轴承11的法兰轴12一端与电机10的输出轴进行连接,法兰轴12另一端与轮式机构13固定连接;其中轮式机构13的外径大于电机模块其它部件。
13.所述电机座9通过螺栓与连接板5上不同位置的螺孔相配合。
14.所述轮式机构13采用麦克纳姆轮。
15.本发明的有益效果是:
16.1、本发明移动组件部分采用了气囊充气式原理,能够更好的适应杆件的粗细尺寸等,同时可以根据机器人的负载大小需求对气囊的压强进行调整,使得气囊内的压强稳定在合适的范围内,保证机器人的运动稳定。
17.2、本发明采用了不同的机架进行拼接的方式构建外框架并搭配对应的移动组件部分,从而能够适应不同形状的杆状攀爬,例如矩形、三角形、圆型等形状的杆或者管道都可以攀爬,适应性强。
18.3、本发明采用了麦克纳姆轮等设计的独特结构能够使得该机器人围绕杆进行圆周运动,同时也能够进行上下移动,结构简单,也具有一定的推广性,可用作人工上下杆移动平台,对机器人机架等进行强度校核以选取合适的电机、充气设备等等,能够为高层作业提供便捷。
附图说明
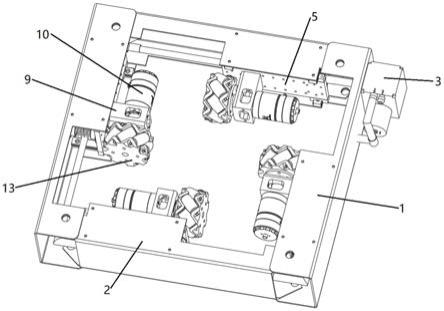
19.图1是本发明的结构示意图;
20.图2是本发明柔性连接机构示意图;
21.图3是本发明移动组件部分与组装置式机架配合处结构示意图一;
22.图4是本发明移动组件部分与组装置式机架配合处结构示意图二;
23.图5是本发明电机模块示意图及剖视图;
24.图6是本发明机器人三角形状拼接的结构示意图;
25.图7是本发明机器人圆状拼接的结构示意图;
26.图中各标号为:1-第一机架、2-第二机架、3-充气泵、4-弹簧组、5-连接板、6-气囊、7-滑轨、8-滑块、9-电机座、10-电机、11-深沟球轴承、12-法兰轴、13-轮式机构。
具体实施方式
27.下面结合附图和实施例,对发明做进一步的说明,但本发明的内容并不限于所述范围。
28.实施例1:如图1-7所示,一种具有适应性的气囊充气式爬杆机器人,包括组装式机架、充气装置部分、移动组件部分,移动组件部分包括柔性连接机构、电机模块;组装式机架用于安装柔性连接机构,充气装置部分用于给柔性连接机构提供动力,通过柔性连接机构与电机模块共同配合用于抱杆行走。具体而言,通过充气装置部分与柔性连接机构配合能够给电机模块9~13一个对杆的力用于抱杆,同时电机模块9~13的移动能够带动整个机器人的上下移动,从而实现抱杆行走。
29.可选地,所述组装式机架包括第一机架1、第二机架2,通过第一机架1、第二机架2拼接成适配杆外形的框架,拼接处采用光轴或者销钉铰接。
30.可选地,所述第一机架1、第二机架2两者的数量之和为n,则移动组件部分的数量为n。如图6所示,第一机架1、第二机架2两者的数量之和为3,移动组件部分的数量也为3,即存在3组柔性连接机构、3组电机模块;如图1所示,则n取值为4;如图7所示,则n取值为7。
31.可选地,所述第一机架1用于与第二机架2连接处为矩形,所述第二机架2用于与第一机架1连接处为不规则形,用于第一机架、第二机架呈不同角度进行连接。
32.可选地,所述充气装置部分包括充气泵3;其中,充气泵3通过螺钉与组装式机架固定连接,通过气管将柔性连接机构中的气囊6进行贯通,通过充气泵3的充气作用对气囊6进行充气,气囊6充气后膨胀会对柔性连接机构中的连接板5进行挤压,进而通过电机模块会对杆进行挤压,从而使机器人对杆产生紧抱作用。
33.可选地,所述柔性连接机构包括弹簧组4、连接板5、气囊6、滑轨7、滑块8;其中,连接板5一侧中间与组装式机架之间安装气囊6,连接板5另一侧用于安装电机模块;弹簧组4包括两组弹簧,弹簧呈对称安装在连接板5一侧的两端,弹簧的两端都有四组螺栓孔,弹簧一端与组装式机架进行螺栓连接,弹簧另一端通过螺栓与连接板5一侧进行固定连接,连接板5上下安装有滑块8,通过滑块8与安装在组装式机架上的滑轨7进行滑动配合。如图中,每组柔性连接机构包括两组弹簧、一组连接板5、一组气囊6、四组滑轨7和滑块8,滑轨7自带螺栓孔,与组装式机架通过螺栓进行固定连接,四组滑块8分别固定在连接板5的上下两侧,通过螺栓与连接板5进行固定连接。
34.可选地,所述电机模块包括电机10、电机座9、法兰轴12、深沟球轴承11、轮式机构13;其中,用于固定电机10的电机座9与柔性连接机构中连接板5固定连接,穿过嵌套在电机座9对应的槽内深沟球轴承11的法兰轴12一端与电机10的d型输出轴进行连接,法兰轴12另一端与轮式机构13固定连接;其中轮式机构13的外径大于电机模块其它部件。具体而言,无刷电机10上面有四组螺栓孔,通过螺栓与电机座9进行固定连接,通过螺栓将电机座9与连接板5上对应的螺栓孔进行固定连接,电机座9带有一组轴承圆柱槽,将深沟球轴承11嵌套在电机座9对应的槽内,法兰轴穿过深沟球轴承11与电机10的d型输出轴进行连接,同时法兰轴12一端带有螺栓孔与轮式机构13对应的螺栓孔进行固定连接。
35.可选地,所述电机座9通过螺栓与连接板5上不同位置的螺孔相配合,用于适配杆的位置,进而更好地抱杆行走。
36.可选地,所述轮式机构13采用麦克纳姆轮。
37.参照图1、图6、图7所示,具有适应性的气囊充气式爬杆机器人主要由充气装置部分和多组移动组件组合而成,充气装置部分的核心部件是充气泵3,通过气管与每组气囊6进行连通,且确保其不漏气,首先需要根据杆的形状、粗细选择合适数量的移动组件部分,并根据实际作业场合调整电机模块在连接板5的位置,采用螺栓固定连接电机座9和连接板5,对组装式机架进行拼接,采用光轴或者销钉将机架连接起来,机器人作业时,充气泵3开始对气囊6充气,气囊6会膨胀给连接板5一个向外的推力,连接板5两端带有滑块8,受到推力会沿着滑轨7克服弹簧组4的拉力向机器人的中心移动,此时,与连接板5固定的电机模块也会给杆一个挤压力,直到机器人的移动组件部分能够紧抱杆,满足机器人作业上下移动的基本条件,此时可以控制电机模块的电机10转动来带动整个机器人上下移动,进行相关的作业,在作业之前也可通过观察气囊6内的压力大小对气压进行调节补偿,直到达到机器人稳定运动的压强范围,保证机器人的运行安全,当停止作业后,机器人到达相应的安全位
置,充气泵3放气,气囊6开始变小,连接板5收到弹簧组4的拉力会沿着滑轨7向反方向移动,此时机器人就会松开杆。
38.参照图1~7所示,该机器人能够应用到实际生活和工业中,该机器人能够根据实际的作业调整机器人的机架外形尺寸、电机类型、充气泵3型号、气囊6大小等,根据此原理选取适合实际作业的组装式机架进行拼接,对于大型的工业也可以基于该机器人进行优化,对机器人的机架及其它构件进行强度等校核,使得该机器人也可以用于人工上下杆使用,可以乘坐该机器人上下杆完成作业。
39.上面结合附图对本发明的具体实施方式作了详细说明,但是本发明并不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下做出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1