并联机械臂与柔性机械手的组合式除草机器人及控制方法
1.本发明涉及智能农机技术领域,具体为一种并联机械臂与柔性机械手的组合式除草机器人及控制方法。
背景技术:
2.我国是农业生产大国,而在生产过程中如何精确、高效的除去林间杂草始终是无法避免的问题。农田杂草对植物生长有着长期影响,一直干扰农作物健康成长。杂草重复的在农田中生长,而农田中水肥条件较好,为杂草生长提供了优良条件,因为杂草生长速度快,环境适应能力强,导致原有农作物生长养分与空间受到严重挤压。在我国的农田作物种植面积常常因为杂草受到严重危害,不仅影响了农作物产量而且对农民的经济回报产生消极影响。
3.目前我国农业除草上依旧是以耗费大量人力为代价的人工喷洒农药或机械除草方式和大型农药喷洒车为主;一则耗费大量时间金钱等代价,二是杂草作为极有可能伴随作物存在,且杂草种类位置常常不同,需要不断重复类似但又不完全相同的操作,三是杂草识别精度低且是不论何种方式进行都会过量使用农药对农作物和当地环境造成一定破坏。另外农药喷洒车运输等调度使用成本高,降低了粮食生产的经济性。
4.机械除草是继化学药剂除草后的一种广泛被人们接受的除草方法,具有重要的研究意义和广泛的应用前景。机械除草作业主要包含行间除草作业和株间除草作业,由于行间除草作业时没有植株的阻挡较容易实现,而进行株间除草作业时需要躲避植株,因此较难实现。
5.现有的除草机多为单刀片切割,对于大面积土地除草,其劳动强度大且效率不高,并且作业面积和作业高度固定不可调,难以适应复杂地形除草作业。且现有除草机在对株间杂草进行除草作业时,其作业部件不仅对株间杂草进行清除,而且也会对植株产生无规律的机械性刮碰损伤,伤苗率较高。
技术实现要素:
6.(一)解决的技术问题
7.针对现有技术的不足,本发明提供了一种基于并联机械臂与柔性机械手的组合式除草机器人,解决了上述背景技术中提出现有大部分的除草机器人仅仅能拔除杂草,在自由度、效率、绕过植株等方面受限,存在无法实现精确除草的问题。
8.(二)技术方案
9.为实现以上目的,本发明通过以下技术方案予以实现:一种基于并联机械臂与柔性机械手的组合式除草机器人,包括:智能控制器、装置搭载平台、太阳能储能供能系统、编码电机、麦克纳姆轮、平台升降支架、摄像头组、执行器搭载平台、并联机械臂、柔性角度调节机构、光源组、除草执行结构;
10.所述智能控制器安装在所述装置搭载平台前方;
11.所述装置搭载平台的四角底部分别安装有四根平台升降支架;
12.所述每根平台升降支架底部安装有一个麦克纳姆轮,每个麦克纳姆轮由一个编码电机驱动控制;
13.所述摄像头组安装在所述智能控制器下方以及所述除草执行结构侧面;
14.所述光源组安装在所述装置搭载平台底部;
15.所述太阳能储能供能系统安装在所述装置搭载平台上方;
16.所述并联机械臂安装在所述装置搭载平台下方;
17.所述柔性角度调节机构通过所述执行器搭载平台安装在所述并联机械臂下方;
18.所述除草执行机构,安装于柔性角度调节机构底部。
19.优选地,所述并联机械臂包括:主轴旋转机构、并联机构组装平台、主传动轴、副传动轴、升降控制机构、姿态与角度调节装置、主传动杆、副传动杆、执行器搭载平台;
20.所述主轴旋转机构位于并联机构组装平台中心,并与主传动轴相连,所述主传动轴数量为两根;
21.两根主传动轴位于中心旋转点两侧,在其中段与末端分别安装有限位器,以固定副传动轴姿态;
22.使用滚珠丝杠副、行程限位器与液压式电器制动器组成的升降控制机构调节副传动轴的升降,同时副传动轴连接于执行器搭载平台;
23.所述主轴旋转机构安装在所述并联机构组装平台下,由三组步进电机与编程逻辑控制器组成的姿态与角度调节装置呈三点分布,关于主传动轴中心对称;
24.所述主传动杆与副传动杆通过转动副连接,并于所述执行器搭载平台连接。
25.优选地,所述并联机构组装平台安装在所述装置搭载平台下方;
26.所述主轴旋转机构,安装在并联机构组装平台中心的工作位上;
27.所述主轴旋转电机安装在所述并联机构组装平台;
28.所述主传动轴安装在所述主轴旋转电机下方;
29.所述升降控制机构安装与所述主传动轴中段,控制所述副传动轴升降运动。
30.优选地,所述主传动轴通过限位器和升降控制机构与副传动轴相连。
31.优选地,所述执行器姿态与角度调节装置由三组旋转电机驱动,与所述主传动杆、副传动杆相连,并与升降控制机构通过执行器搭载平台相连,由智能控制器控制。
32.优选地,所述柔性角度调节机构,安装在副传动轴底部;
33.所述执行器搭载平台,安装在执行器姿态与角度调节装置下端;
34.所述柔性角度调节机构由三个结构相同位置交错的关节元件和两个终端固定元件组成,其关于中心对称的四点上均留有穿引绳通孔,并由安装在执行机构搭载平台上的四组电机与电机转换装置驱动,其末端与除草执行机构相连。
35.优选地,所述除草执行结构,包括:刀头转向电机、除草执行装置、刀具、执行器摄像头;
36.刀头转向电机控制刀具旋转运动,并调节刀面法向;
37.所述除草执行装置固定安装刀具;
38.所述执行器摄像头与所述智能控制器通讯,控制刀头转向电机转动。
39.优选地,所述光源组包含多个led灯珠的光源组;led灯珠所述均匀分布在装置搭
载平台下方。
40.优选地,所述太阳能储能供能系统包括:太阳能板、光源转换器、传感器、升压稳压电路和透镜耦合系统;所述太阳能板收集的电能经控制器向所述蓄电池充电;所述蓄电池的电能通过逆变器向除草机器人的各个部件提供电源。
41.本发明还提供一种并联机械臂与柔性机械手的组合式除草机器人控制方法,基于如前任一所述的除草机器人,包括:基于深度神经网络识别技术构建杂草识别系统;
42.在除草机器人操作系统中开启实时定位和地图构建;
43.获取除草机器人的除草执行部件当前的位置、距离、环境信息数据;
44.在除草机器人操作系统中绘制栅格地图,并利用slam算法和rgb-d的深度摄像头的视觉里程计进行环境感知,融合生成三维点云地图;
45.基于rtk-gnss技术在路径构成回路时对所述三维点云地图进行矫正,计算所述机器人路径;
46.计算除草机器人当前位置并匹配三维点云地图中的坐标,根据给定的目标点位置,控制智能除草机器人运动至目标位置;
47.除草机器人在行走过程中,所述摄像头组采集实时数据并传输到智能控制器,智能控制器捕捉到与所述杂草识别系统特征相符的杂草时,确定杂草所在位置,并将所述杂草所在位置数据回传至智能控制器;
48.智能控制器发布控制指令给所述并联机械臂、柔性角度调节机构、除草执行结构,将所述除草执行器移动到除草工作需要的工作位置,并执行除草操作,同时智能控制器控制所述编码电机停止转动以使得麦克纳姆轮停止转动,机器人静止,至除草动作完成;
49.当一处的除草动作完成时,所述并联机械臂、柔性角度调节机构、除草执行结构回到初始位置,除草机器人继续行进,继续采集下一处杂草数据。
50.优选地,所述基于深度神经网络识别技术构建杂草识别系统,包括:
51.获取初始检测图像数据集,实时拍摄杂草图片或从网上获取不同种类、不同颜色、不同大小的各式杂草图片,每张图像均包含杂草目标,背景可各不相同;
52.对所述初始检测图像数据集进行数据预处理得到目标检测的训练图像,对所需识别的杂草进行标记,创建不同杂草类别用作最终图像对比识别;
53.对所述初始检测图像数据集中的图像进行随机旋转,随机剪裁,水平翻转,垂直翻转,变形缩放,颜色变换,并将图像进行重新组合,以得到目标组合图像;
54.基于所述训练图像对预设的神经网络模型进行训练,所述神经网络训练提取到训练图像的多个特征图,得到对应的目标检测模型。
55.有益效果
56.本发明提供了并联机械臂与柔性机械手的组合式除草机器人及控制方法。具备以下有益效果:
57.一种基于并联机械臂与柔性机械手的组合式除草机器人,通过并联机械臂与柔性机械手组合式除草执行机构能够完全绕过植株本身进行除草的株间除草,装置可以实现在绕过植株的前提下,进行多自由度精准除草工作,使用方便,效率高,并且充分利用太阳能储能功能模块,使得机器人功耗大大降低,基本实现零排放。
附图说明
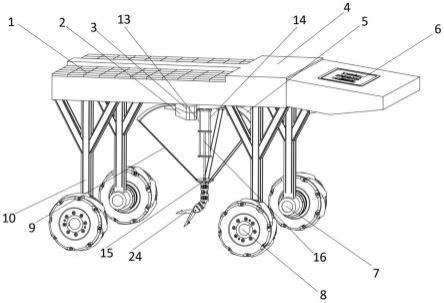
58.图1为本发明提供的一种并联机械臂与柔性机械手的组合式除草机器人结构立体图;
59.图2为本发明提供的一种并联机械臂与柔性机械手的组合式除草机器人器人仰视结构立体图;
60.图3为本发明提供的一种并联机械臂与柔性机械手的组合式除草机器人的并联机械臂与柔性角度调节机构结构立体图;
61.图4为本发明提供的一种并联机械臂与柔性机械手的组合式除草机器人的柔性角度调节机构结构立体图;
62.图5为本发明提供的一种并联机械臂与柔性机械手的组合式除草机器人的并联机械臂立体图;
63.图6为本发明提供的一种并联机械臂与柔性机械手的组合式除草机器人控制方法流程图
64.图中:太阳能储能供能装置1,步进电机2,并联机构组装平台3,装置搭载平台4,主传动杆5,智能控制器6,编码电机7,麦克纳姆轮8,副传动杆9,平台升降支架10,摄像头11,主轴旋转电机12,第一主传动轴13,第二主传动轴14,执行器搭载平台15,副传动轴16,第一限位器161,第二限位器161,第一终端固定元件17,第一关节元件18,第二关节元件19,第三关节元件20,第二终端固定元件21,刀头转向电机22,执行器摄像头23,刀具24,牵引绳25,穿引绳通孔26,碳素钢钢丝绳27,除草执行装置28。
具体实施方式
65.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
66.一种基于并联机械臂与柔性机械手的组合式除草机器人,包括:智能控制器6、装置搭载平台4、太阳能储能供能1、编码电机7、麦克纳姆轮8、平台升降支架10、摄像头组、执行器搭载平台15、并联机械臂、柔性角度调节机构、光源组、除草执行结构;
67.所述智能控制器6安装在所述装置搭载平台4前方;
68.所述装置搭载平台4的四角底部分别安装有四根平台升降支架10;
69.所述每根平台升降支架10底部安装有一个麦克纳姆轮8,每个麦克纳姆轮由一个编码电机7驱动控制;
70.所述摄像头组安装在所述智能控制器6下方以及所述除草执行结构侧面;
71.所述光源组安装在所述装置搭载平台4底部;
72.所述太阳能储能供能系统1安装在所述装置搭载平台4上方;
73.所述并联机械臂安装在所述装置搭载平台4下方;
74.所述柔性角度调节机构通过所述执行器搭载平台4安装在所述并联机械臂下方;
75.所述除草执行机构,安装于柔性角度调节机构底部。
76.优选地,所述并联机械臂包括:主轴旋转机构、并联机构组装平台3、主传动轴13、14、副传动轴16、升降控制机构、姿态与角度调节装置、主传动杆、副传动杆、执行器搭载平台;
77.所述主轴旋转机构位于并联机构组装平台3中心,并与主传动轴13、14相连,所述主传动轴数量为两根;
78.两根主传动轴位于中心旋转点两侧,在其中段与末端分别安装有限位器161、162,以固定副传动轴16姿态;
79.使用滚珠丝杠副、行程限位器与液压式电器制动器组成的升降控制机构调节副传动轴16的升降,同时副传动轴16连接于执行器搭载平台15;
80.所述主轴旋转机构安装在所述并联机构组装平台3下,由三组步进电机2与编程逻辑控制器组成的姿态与角度调节装置呈三点分布,关于主传动轴13、14中心对称;
81.所述主传动杆5与副传动杆9通过转动副连接,并于所述执行器搭载平台15连接。
82.并联机械臂安装在装置搭载平台4下,由主轴转向电机12,升降控制机构,执行器姿态与角度调节装置组成。安装于并联机构组装平台3的主轴旋转电机12带动主传动轴13、14旋转并调整角度。升降控制机构由滚珠丝杠副、行程限位器与液压式电器制动器组成,控制由限位器161、162固定姿态的副传动轴16升降,同时副传动轴连接于执行器搭载平台,进而调节执行器搭载平台的高度。通过安装于并联机构组装平台3的三组步进电机2与编程逻辑控制器,调整主传动杆5与副传动杆9的角度位置,组成姿态与角度调节装置。姿态与角度调节装置、主轴旋转机构与升降控制机构共同调节执行器搭载平台15的空间位置与姿态,使其可在三维空间内多自由度运动。
83.优选地,所述并联机构组装平台安装在所述装置搭载平台4下方;
84.所述主轴旋转机构,安装在并联机构组装平台3中心的工作位上;
85.所述主轴旋转电机12安装在所述并联机构组装平台3;
86.所述主传动轴13,14安装在所述主轴旋转电机下方;
87.所述升降控制机构安装与所述主传动轴13,14中段,控制所述副传动轴16升降运动。
88.优选地,所述主传动轴13,14通过限位器161、162和升降控制机构与副传动轴16相连。
89.优选地,所述执行器姿态与角度调节装置由三组旋转电机驱动,与所述主传动杆5、副传动杆9相连,并与升降控制机构通过执行器搭载平台15相连,由智能控制器6控制。
90.优选地,所述柔性角度调节机构,安装在副传动轴底部;
91.所述执行器搭载平台,安装在执行器姿态与角度调节装置下端;
92.所述柔性角度调节机构由三个结构相同位置交错的关节元件(19、20、21)和两个终端固定元件(17、21)组成,其关于中心对称的四点上均留有穿引绳通孔26,并由安装在执行机构搭载平台15上的四组电机与电机转换装置驱动,其末端与除草执行机构相连。
93.柔性角度调节机构安装于执行器搭载平台15上,由三个结构相同位置交错的关节元件18、19、20和两个终端固定元件17、21组成,各组件关于中心对称的四点上均留有穿引绳通孔26,并由安装在执行机构搭载平台上的四组电机与电机转换装置牵引碳素钢钢丝绳27驱动。柔性角度调节机构进行角度调节时,电机与电机转换装置将拉动牵引绳25,调节一定的角度并保持稳定,实现执行器的角度调节。
94.优选地,所述除草执行结构,包括:刀头转向电机22、除草执行装置28、刀具24、执行器摄像头23;
95.刀头转向电机22控制刀具24旋转运动,并调节刀面法向;
96.所述除草执行装置28固定安装刀具24;
97.所述执行器摄像头23与所述智能控制器通讯,控制刀头转向电机22转动;刀头转向电机22和除草执行装置28,其上所搭载的旋转电机22可将刀具24旋转到合适位置,调节刀面法向,通过执行器摄像头寻找合适角度,夹紧刀头,执行除草动作,将杂草去除。
98.优选地,所述光源组包含多个led灯珠的光源组;led灯珠所述均匀分布在装置搭载平台下方。
99.优选地,所述太阳能储能供能系统1包括:太阳能板、光源转换器、传感器、升压稳压电路和透镜耦合系统;所述太阳能板收集的电能经控制器向所述蓄电池充电;所述蓄电池的电能通过逆变器向除草机器人的各个部件提供电源。
100.优选地,智能控制器6使用分布式控制,分为两层控制:下位机和上位机。下位机接受来自各传感器的数据,然后通过canbus协议,将数据发送到上位机,上位机接受传感器的数据,然后通过算法,计算出装置的状态,再通过canbus协议发送到下位机,供下位机来控制各种执行器。本发明控制系统采用脱机控制,将主要的算法放在嵌入式系统上运行,将传感器的驱动放在stm32单片机上运行,然后单片机将传感数据发送到嵌入式系统上,由嵌入式系统处理stm32发送过来的数据,再将执行器的信息通过canbus协议传输给stm32执行。
101.工作原理:将本发明一种基于并联机械臂与柔性机械手的组合式除草机器人,搭载于安装有太阳能储能供能系统1、由编码电机7驱动的麦克纳姆轮8和平台升高支架10的搭载平台4上。
102.装置行于田间时,与智能控制器6相连的摄像头11采集并将实时数据传输到智能控制器6,识别到杂草植株时,编码电机7停止工作使搭载平台停止。
103.主轴旋转电机12带动主传动轴13、14旋转并调整角度。升降控制机构控制由限位器161、162固定姿态的副传动轴16升降,调节执行器搭载平台的高度。
104.安装于并联机构组装平台3的三组步进电机2与编程逻辑控制器,调整主传动杆5与副传动杆9的角度位置,调节执行器搭载平台15的空间位置与姿态,使其移动到空间内合适位置。
105.并联机械臂使执行器运动到指定位置后,安装在执行机构搭载平台15上的四组电机与电机转换装置牵引碳素钢钢丝绳27,再次调整执行器指向姿态,完全避开可能存在的农作物植株遮挡。
106.除草执行机构移动到指定位置,通过执行器摄像头寻找合适角度,刀头转向电机22将刀具24旋转到合适位置,调节刀面法向,除草执行装置28工作,通过电机夹紧刀头,执行除草动作,将杂草去除,装置继续工作,识别下一处杂草植株。
107.当工作时处于晚上或是光照强度较弱时,智能控制器6根据处理光敏传感器对外界的反馈并分析后发布控制指令给固定在装置搭载平台4下的光源组,控制led灯亮起的数量,为杂草识别系统提供补充光源。
108.当指定区域内的所有除草工作都完成后,机器人将会进入休眠状态,以减少能耗,最大程度的节省电能。
109.本发明还提供一种并联机械臂与柔性机械手的组合式除草机器人控制方法,基于如前任一所述的除草机器人,包括:
110.s1基于深度神经网络识别技术构建杂草识别系统;
111.s2在除草机器人操作系统中开启实时定位和地图构建;
112.s3获取除草机器人的除草执行部件当前的位置、距离、环境信息数据;
113.s4在除草机器人操作系统中绘制栅格地图,并利用slam算法和rgb-d的深度摄像头的视觉里程计进行环境感知,融合生成三维点云地图;
114.s5基于rtk-gnss技术在路径构成回路时对所述三维点云地图进行矫正,计算所述机器人路径;
115.s6计算除草机器人当前位置并匹配三维点云地图中的坐标,根据给定的目标点位置,控制智能除草机器人运动至目标位置;
116.s7除草机器人在行走过程中,所述摄像头组采集实时数据并传输到智能控制器,智能控制器捕捉到与所述杂草识别系统特征相符的杂草时,确定杂草所在位置,并将所述杂草所在位置数据回传至智能控制器;
117.s8智能控制器发布控制指令给所述并联机械臂、柔性角度调节机构、除草执行结构,将所述除草执行器移动到除草工作需要的工作位置,并执行除草操作,同时智能控制器控制所述编码电机停止转动以使得麦克纳姆轮停止转动,机器人静止,至除草动作完成;
118.s9当一处的除草动作完成时,所述并联机械臂、柔性角度调节机构、除草执行结构回到初始位置,除草机器人继续行进,继续采集下一处杂草数据。
119.优选地,所述基于深度神经网络识别技术构建杂草识别系统,包括:
120.获取初始检测图像数据集,实时拍摄杂草图片或从网上获取不同种类、不同颜色、不同大小的各式杂草图片,每张图像均包含杂草目标,背景可各不相同;
121.对所述初始检测图像数据集进行数据预处理得到目标检测的训练图像,对所需识别的杂草进行标记,创建不同杂草类别用作最终图像对比识别;
122.对所述初始检测图像数据集中的图像进行随机旋转,随机剪裁,水平翻转,垂直翻转,变形缩放,颜色变换,并将图像进行重新组合,以得到目标组合图像;
123.基于所述训练图像对预设的神经网络模型进行训练,所述神经网络训练提取到训练图像的多个特征图,得到对应的目标检测模型。
124.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1