一种用于森林消防的灭火方法以及灭火无人机与流程
1.本发明涉及森林消防技术领域,具体为一种用于森林消防的灭火方法以及灭火无人机。
背景技术:
2.森林火灾时利用无人机携带灭火弹进行灭火的方法,具有机动性强、灭火速度快以及安全性高的特点,但目前大多地区在施行此种方法进行灭火时,无人机群排列无章,多通过分散式对火势较重处进行灭火,一方面无人机数量较多,灭火成本过高,另一方面其他地区的火势回随风向改变而迅速蔓延,实际灭火效果和效率较差,公开号为cn111821609a的专利,于森林火灾发生处设立隔离区和缓冲区,虽然简单有效,但人力和时间成本过高,同时还会对森林资源造成破坏,不利于推广和使用。
3.目前市面上大多用于森林灭火的无人机装载能力差,单次仅能携带一枚灭火弹,投掷后既要返航补充灭火弹,影响森林灭火效率,且缺少对森林风向的监测功能,不便消防指挥人员根据风向调整灭火方法,且此类无人机缺乏抗风手段,在火灾上空飞行时,易受气浪影响而出现不稳的情况,严重时还可能导致无人机偏航坠毁,安全性和实用性较差。
技术实现要素:
4.本发明的目的在于提供一种用于森林消防的灭火方法以及灭火无人机,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:一种用于森林消防的灭火方法,包括以下环节:1)监控:指派无人机定时定点于森林上空对森林各处进行监控,无人机将图像信息传输至消防中心,消防中心人员对图像信息进行观察,当森林出现火灾时,消防中心人员立刻联络距该起火森林最近的消防局,消防局指派救火人员携带救火工具立即前往起火点进行灭火;2)围灭:指派灭火无人机携带干粉灭火弹前往森林起火点上空,若火势处于初期阶段,波及范围较小,直接控制灭火无人机向起火点处投掷干粉灭火弹进行灭火,若火势蔓延范围较大,且处于大风天气,实时监测起火处风向,指派灭火无人机机群携带干粉灭火弹前往火灾下风向处,灭火无人机机群组呈“u”形包围火灾区域下风向的边缘处,同时向下投掷干粉灭火弹,此处火势被扑灭后,控制灭火无人机机群沿着火灾区域边缘处继续飞行至另一处起火点再次进行灭火作业,最终呈围绕式将火灾区域内的火势完全扑灭。
6.优选的,所述监控环节中消防中心人员在联络距起火森林最近的消防局时,同时将起火点具体地理坐标报告给该局,除指派无人机于空中进行监控外,还应指派巡视人员定时巡视森林。
7.优选的,所述围灭环节中灭火无人机机群呈“u”形分布时,相邻两台灭火无人机之间的最大间距应当不超过单个干粉灭火弹的灭火直径。
8.一种用于森林消防的灭火无人机,包括外壳体,所述外壳体为空心结构,外壳体的内部集成有无人机主板、无人机芯片、陀螺仪传感器、蓄电池以及接收器,外壳体的外壁上
固定安装有四组安装杆且呈环形阵列分布,安装杆的顶端固定安装有螺旋桨,所述外壳体上设置有挂载投掷机构、调节机构和减震支撑机构,外壳体的底部固定安装有支架。
9.优选的,所述挂载投掷机构包括挂载杆、阻挡杆、复位弹簧、锥形顶杆、传动齿轮、齿轮板和第一马达,支架上固定安装有挂载杆,挂载杆呈倾斜设置,挂载杆的外壁上开设有五组开孔,开孔内活动套设有阻挡杆,阻挡杆位于挂载杆内部的一段外壁上套设有复位弹簧,阻挡杆的外壁上固定安装有安装环,复位弹簧的两端分别与挂载杆和安装环固定连接,挂载杆的内部活动套设有锥形顶杆,锥形顶杆的外壁上开设有滑槽,挂载杆的内壁上固定安装有滑条,滑条滑动安装于滑槽内,挂载杆与锥形顶杆滑动安装,挂载杆的外壁上固定安装有两组耳板,两组耳板之间转动安装有传动齿轮,挂载杆的外壁上开设有开槽,传动齿轮位于开槽内侧,锥形顶杆的外壁上开设有安装槽,安装槽内固定安装有齿轮板,传动齿轮与齿轮板相啮合,耳板上固定安装有支板,支板上固定安装有第一马达,第一马达的输出轴通过连接器与传动齿轮固定连接。
10.优选的,所述阻挡杆的长度大于挂载杆的内径,挂载杆的内壁上开设有卡槽,阻挡杆的一端插接于卡槽内,阻挡杆的外壁上开设有凹槽,提升挂载稳定性,锥形顶杆的一端固定安装有拉环,便于将锥形顶杆送回挂载杆内。
11.优选的,所述螺旋桨的外侧设置有防护壳,保护螺旋桨,降低故障风险,防护壳的内壁上固定安装有支架,支架的底部固定安装有支杆,支杆的一端与安装杆的外壁固定连接,四组安装杆的外壁上均固定安装有一组固定杆,外壳体的上方设置有承载台,固定杆的一端与承载台的底部固定连接,外壳体与安装杆的外壁之间固定安装有加强肋板,提升支撑稳定性。
12.优选的,所述调节机构包括z形支架、安装框、转杆、导风板、齿轮、第二马达和风向传感器,支架的前后侧均固定安装有一组z形支架,两组z形支架之间固定安装有安装框,安装框的内侧顶部和内侧底部之间转动安装有八组转杆,转杆的外壁上固定安装有两组导风板且呈对称分布,八组转杆的一端均延伸至安装框的下方并固定安装有一组齿轮,八组齿轮相啮合,安装框的顶部固定安装有第二马达,第二马达的输出轴通过联轴器延伸至安装框的内部并与一组转杆的另一端固定连接,承载台的顶部转动安装有风向传感器,第二马达与风向传感器电连接,降低无人机受风力和气浪影响而出现偏移情况的可能性,为无人机的安全提供保障。
13.优选的,所述减震支撑机构包括套杆、支撑斜杆、降落架和扭簧,外壳体的外壁上固定安装有两组套杆,两组套杆分别位于的支架前后侧,套杆上活动套设有两组支撑斜杆和两组扭簧,支撑斜杆的底端固定安装有降落架,扭簧的两端分别与套杆和支撑斜杆固定连接,减轻了无人机在降落时受到的损伤,降低无人机故障率以及维稳成本。
14.与现有技术相比,本发明的有益效果是:
15.(1)、该用于森林消防的灭火方法,利用无人机的高机动性于森林上空进行全方位监控,能够于火灾发生时第一时间获取火灾位置信息,相较于传统人工巡逻的方式,降低了劳动力的投入,信息获得更加准确,监控覆盖面积更广,在利用无人机进行灭火时采用“u”形阵列,并于火灾下风口自下而上围绕式地进行灭火作业,针对风向实时对无人机机群灭火方位进行调整,火灾区域边缘处在灭火弹的“u”形扑灭作用下自动形成隔离,防止火势大范围蔓延,及时止损,相较于对比案例以及部分其他的灭火方法,不需要砍伐出隔离带隔离
火势,一方面减轻了对森林资源的破坏,保护环境,另一方面降低了人力资源的投入,缩减灭火成本,提高灭火作业效率,降低火灾损失,方法简单,科学高效,利于推广和使用。
16.(2)、该用于森林消防的灭火无人机,通过挂载杆、阻挡杆、复位弹簧、锥形顶杆、传动齿轮、齿轮板和第一马达的配合使用,使得该无人机能够同时装载五枚灭火弹,相较于普通灭火无人机,大大地提升了消防灭火作业能力,满足较大范围灭火作业要求,拓宽了该无人机的使用场景和范围,不需要来回往复装载,缩减了灭火耗时,提升了灭火作业的效率,把握灭火有效时间,利于扑灭火势,且灭火弹的投掷方式便捷可控,结构简单,利于推广和使用,消防人员只需将灭火弹通过其上吊环挂置于阻挡杆上即完成装载,操作方式快捷,节省灭火作业准备时间,实用性高。
17.(3)、该用于森林消防的灭火无人机,通过安装框、导风板、齿轮、第二马达、风向传感器、支撑斜杆和扭簧的配合使用,能够根据森林火灾发生处的实时风向对转杆的朝向进行相应地调整,降低风力以及火灾气浪对无人机飞行造成的干扰,降低无人机受风力和气浪影响而出现偏移情况的可能性,为无人机的安全提供保障,降低不必要的经济损失,同时该无人机整体采用框架式的结构设计,在飞行时原本受到的风阻就较小,在森林火灾上空的飞行作业中也能更加顺畅稳定,进一步保障了无人机灭火作业的推进,套设于套杆上的支撑斜杆在扭簧的应力作业下使得该无人机在降落时能够将竖向的重力分散至外侧,减轻了无人机在降落时受到的损伤,降低无人机故障率以及维稳成本,延长了使用寿命,结构简单,实用安全,利于推广和使用。
附图说明
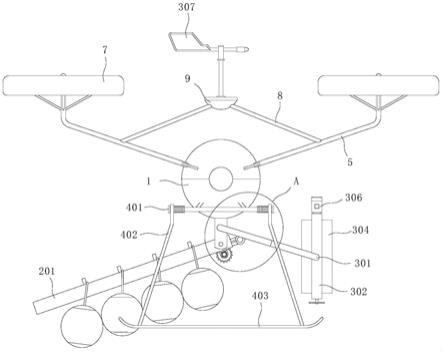
18.图1为本发明的结构示意图;
19.图2为本发明的挂载杆内部结构示意图;
20.图3为本发明的锥形顶杆侧视图;
21.图4为本发明的a部放大图;
22.图5为本发明的防护壳内部结构示意图;
23.图6为本发明的导风板右视图。
24.图中:1外壳体、2挂载投掷机构、201挂载杆、202阻挡杆、203复位弹簧、204锥形顶杆、205传动齿轮、206齿轮板、207第一马达、3调节机构、301z形支架、302安装框、303转杆、304导风板、305齿轮、306第二马达、307风向传感器、4减震支撑机构、401套杆、402支撑斜杆、403降落架、404扭簧、5安装杆、6螺旋桨、7防护壳、8固定杆、9承载台、10支架。
具体实施方式
25.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
26.本发明提供一种技术方案:一种用于森林消防的灭火方法,其特征在于包括以下环节:
27.1)监控:指派无人机定时定点于森林上空对森林各处进行监控,无人机将图像信
息传输至消防中心,消防中心人员对图像信息进行观察,当森林出现火灾时,消防中心人员立刻联络距该起火森林最近的消防局,同时将起火点具体地理坐标报告给该局,除指派无人机于空中进行监控外,还应指派巡视人员定时巡视森林,消防局指派救火人员携带救火工具立即前往起火点进行灭火,能够于火灾发生时第一时间获取火灾位置信息,相较于传统人工巡逻的方式,降低了劳动力的投入,信息获得更加准确,监控覆盖面积更广;
28.2)围灭:指派灭火无人机携带干粉灭火弹前往森林起火点上空,若火势处于初期阶段,波及范围较小,直接控制灭火无人机向起火点处投掷干粉灭火弹进行灭火,若火势蔓延范围较大,且处于大风天气,实时监测起火处风向,指派灭火无人机机群携带干粉灭火弹前往火灾下风向处,灭火无人机机群组呈“u”形包围火灾区域下风向的边缘处,相邻两台灭火无人机之间的最大间距应当不超过单个干粉灭火弹的灭火直径,同时向下投掷干粉灭火弹,此处火势被扑灭后,控制灭火无人机机群沿着火灾区域边缘处继续飞行至另一处起火点再次进行灭火作业,最终呈围绕式将火灾区域内的火势完全扑灭,利用无人机进行灭火时采用“u”形阵列,并于火灾下风口自下而上围绕式地进行灭火作业,针对风向实时对无人机机群灭火方位进行调整,火灾区域边缘处在灭火弹的“u”形扑灭作用下自动形成隔离,防止火势大范围蔓延,及时止损,相较于对比案例以及部分其他的灭火方法,不需要砍伐出隔离带隔离火势,减轻了对森林资源的破坏,保护环境,降低了人力资源的投入。
29.实施例一:
30.请参阅图1
‑
6,一种用于森林消防的灭火无人机,包括外壳体1,外壳体1为空心结构,外壳体1的内部集成有无人机主板、无人机芯片、陀螺仪传感器、蓄电池以及接收器,外壳体1的外壁上固定安装有四组安装杆5且呈环形阵列分布,安装杆5的顶端固定安装有螺旋桨6,外壳体1上设置有挂载投掷机构2、调节机构3和减震支撑机构4,外壳体1的底部固定安装有支架10。
31.进一步地,螺旋桨6的外侧设置有防护壳7,防护壳7的内壁上固定安装有支架,支架的底部固定安装有支杆,支杆的一端与安装杆5的外壁固定连接,四组安装杆5的外壁上均固定安装有一组固定杆8,外壳体1的上方设置有承载台9,固定杆8的一端与承载台9的底部固定连接,外壳体1与安装杆5的外壁之间固定安装有加强肋板。
32.实施例二:
33.请参阅图1
‑
6,在实施例一的基础上,挂载投掷机构2包括挂载杆201、阻挡杆202、复位弹簧203、锥形顶杆204、传动齿轮205、齿轮板206和第一马达207,支架10上固定安装有挂载杆201,挂载杆201呈倾斜设置,挂载杆201的外壁上开设有五组开孔,开孔内活动套设有阻挡杆202,阻挡杆202位于挂载杆201内部的一段外壁上套设有复位弹簧203,阻挡杆202的外壁上固定安装有安装环,复位弹簧203的两端分别与挂载杆201和安装环固定连接,挂载杆201的内部活动套设有锥形顶杆204,锥形顶杆204的外壁上开设有滑槽,挂载杆201的内壁上固定安装有滑条,滑条滑动安装于滑槽内,挂载杆201与锥形顶杆204滑动安装,挂载杆201的外壁上固定安装有两组耳板,两组耳板之间转动安装有传动齿轮205,挂载杆201的外壁上开设有开槽,传动齿轮205位于开槽内侧,锥形顶杆204的外壁上开设有安装槽,安装槽内固定安装有齿轮板206,传动齿轮205与齿轮板206相啮合,耳板上固定安装有支板,支板上固定安装有第一马达207,第一马达207的输出轴通过连接器与传动齿轮205固定连接,能够同时装载五枚灭火弹,相较于普通灭火无人机,大大地提升了消防灭火作业能力,满足
较大范围灭火作业要求,拓宽了该无人机的使用场景和范围,不需要来回往复装载,缩减了灭火耗时,提升了灭火作业的效率,把握灭火有效时间,利于扑灭火势,且灭火弹的投掷方式便捷可控,结构简单,造价和运行成本低。
34.进一步地,阻挡杆202的长度大于挂载杆201的内径,挂载杆201的内壁上开设有卡槽,阻挡杆202的一端插接于卡槽内,阻挡杆202的外壁上开设有凹槽,锥形顶杆204的一端固定安装有拉环。
35.更进一步地,调节机构3包括z形支架301、安装框302、转杆303、导风板304、齿轮305、第二马达306和风向传感器307,支架10的前后侧均固定安装有一组z形支架301,两组z形支架301之间固定安装有安装框302,安装框302的内侧顶部和内侧底部之间转动安装有八组转杆303,转杆303的外壁上固定安装有两组导风板304且呈对称分布,八组转杆303的一端均延伸至安装框302的下方并固定安装有一组齿轮305,八组齿轮305相啮合,安装框302的顶部固定安装有第二马达306,第二马达306的输出轴通过联轴器延伸至安装框302的内部并与一组转杆303的另一端固定连接,承载台9的顶部转动安装有风向传感器307,第二马达306与风向传感器307电连接,能够根据森林火灾发生处的实时风向对转杆303的朝向进行相应地调整,降低风力以及火灾气浪对无人机飞行造成的干扰,降低无人机受风力和气浪影响而出现偏移情况的可能性,为无人机的安全提供保障,降低不必要的经济损失,同时该无人机整体采用框架式的结构设计,在飞行时原本受到的风阻就较小,在森林火灾上空的飞行作业中也能更加顺畅稳定,保障了无人机在灭火作业的稳定推进。
36.再进一步地,减震支撑机构4包括套杆401、支撑斜杆402、降落架403和扭簧404,外壳体1的外壁上固定安装有两组套杆401,两组套杆401分别位于支架10的前后侧,套杆401上活动套设有两组支撑斜杆402和两组扭簧404,支撑斜杆402的底端固定安装有降落架403,扭簧404的两端分别与套杆401和支撑斜杆402固定连接,无人机在降落时能够将竖向的重力分散至外侧,减轻了无人机在降落时受到的损伤,降低无人机故障率以及维稳成本,延长了使用寿命。
37.工作原理:通过拉环向内推动锥形顶杆204,锥形顶杆204将阻挡杆202顶出挂载杆201内,复位弹簧203压缩,将用于灭火的灭火弹挂置于阻挡杆202和挂载杆201的夹角处,完成装载,控制螺旋桨6启动,无人机升起飞行,无人机前往火灾发生点,当需要投掷灭火弹时,控制第一马达207启动,带动传动齿轮205转动,与传动齿轮205啮合的齿轮板206随之被其拨动,锥形顶杆204在挂载杆201内运动并逐渐伸出挂载杆201内,锥形顶杆204与阻挡杆202脱离,复位弹簧203失去锥形顶杆204的顶动后在自身应力作用下回弹,带动阻挡杆202缩回挂载杆201内,阻挡杆202上挂置的灭火弹失去阻挡杆202的阻挡后在重力作用下从倾斜设置的挂载杆201上滑落,完成投掷,如此继续控制传动齿轮205转动,其余四组灭火弹相继落下,风向传感器307实时检测所处地点的风向,并控制第二马达306转动,第二马达306带动一组转杆303转动,通过齿轮305的啮合传动作用带动其余七组转杆303转动,各组导风板304的朝向随之改变,无人机在飞行时导风板304对气流进行导向,使无人机飞行顺畅,当无人机降落时,降落架403与地面接触,两组倾斜设置的支撑斜杆402在重力作用下向外侧翻转,支撑斜杆402随之压缩并在其上应力作用下回弹,抵消了部分无人机下降时受到的压力,起到减震防护作用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1