一种常态化火情巡检预警消防救援陆空机器人
1.本实用新型涉及一种常态化火情巡检预警消防救援陆空机器人,属于智能控制技术领域。
背景技术:
2.我国幅员辽阔、人口众多,各类企业林立,生产活动纷繁复杂,安全生产压力巨大,其中火灾消防救援任务繁杂,形势依然严峻,火灾事故发生几率居高不下,尤其是工业园区、山林、矿井及其他地下工程的消防救援工作,更是任务重、问题多,难免出现消防安全漏洞,且由于这些地点具有特殊性、复杂性,一旦发生火情极易快速发展成为特别重大火灾,这一严峻问题亟待解决。然而,目前市场上实际应用的消防机器人功能单一,大多数消防机器人只能实现巡检、消防,疏导等功能中的单一项,例如已应用于消防工作中的全向移动侦察消防机器人和智能消防搜救机器人,它们只能实现对火灾现场环境的侦察工作,或者是消防工作,并没有将巡检、侦察与消防、疏导等功能融为一体。其发现火情后,上报相关人员,等待消防与救援,这种救灾救援方式留下了等待救援的时间空挡,在很大程度上浪费了救灾救援的宝贵时间,尚未见有实现常态化火情巡检、预警、消防、救援为一体的陆空机器人。
技术实现要素:
3.针对现有技术的不足,本实用新型提供一种常态化火情巡检预警消防救援陆空机器人。该机器人能够高效地完成火灾预警、消防、疏散引导等工作,极大地缩短了火灾事故的预处理和消防时间,减少了火灾对人民生命财产、国家社会经济发展造成的损失,极大地降低了对消防官兵的生命威胁。
4.本实用新型的技术方案如下:
5.一种常态化火情巡检预警消防救援陆空机器人,包括先锋消防机器人和哨兵无人机,
6.先锋消防机器人包括机架,机架下方设有驱动轮,机架上方设有停机坪,停机坪用于停放哨兵无人机,机架内部设有控制模块,机架前端设有机械臂,机械臂上设有灭火组件;
7.控制模块包括51单片机和树莓派,树莓派可通过信号串口向51单片机发送高低电平,51单片机接收到信号做出不同反应并将信号再返回树莓派进行校准,树莓派通过无线传输与控制端连接;
8.机械臂前端设有机械爪和破障钻头,机械爪由两台可控电动舵机驱动,为四自由度,破障钻头由一台电机驱动,可控电动舵机和钻头直流电机均连接至控制模块树莓派;可通过电脑wifi远程控制机械臂的姿态及钻头的角度,用以解决机器人在复杂工作环境中因为地形限制、障碍物阻挡等导致机器人无法正常行进的问题,同时此机构可在特殊火灾情况中代替消防人员进入无法进入的区域。该机构的机械爪在火灾现场可代替消防人员抓取
危险易爆物品,给消防人员的生命安全增加一份保障。机械臂选用两部工作电压为4.8~6v的995舵机串联组合而成。其特点是可实现四自由度姿态调整并可实现机械手的夹持功能,还有扭矩大、可防卡死。该机械臂能让机器人实现调整消防作业角度以及破障抓取功能。
9.舵机是由pwm电源驱动板来控制角度,pwm的高电平时间0.5
‑
2.5ms对应舵机的0
°‑
180
°
,舵机两端有死区,长时间工作在死区,会导致舵机损坏,一般会让舵机工作在20
°‑
160
°
之间。
10.灭火组件包括水箱、电控水泵,电控水泵与控制模块树莓派连接,由控制模块树莓派控制水泵的吸、排及功率大小,电控水泵入水口与水箱通过软管连接,电控水泵排水口通过软管连接至喷头,喷头设于机械臂前端,操作人员能够通过控制机械臂的姿态,调整水柱的喷射角度及距离,对异常热源进行降温冷却以及对火情进行扑灭。
11.哨兵无人机上设有32飞控模块及与其连接的摄像头、语音传输模块,32飞控模块通过无线传输连接至控制端,控制端为电脑或手机,由人员操作;可以进行远距离高空喊话,用于消防灭火路线引导、被困人员疏散引导等。
12.优选的,喷头包括两个,分别为细喷头和粗喷头,两个喷头分别设有控制开关,控制开关与控制模块树莓派连接。按照水泵功率大小及火场需要,设计出的灭火喷头共有远距离灭火、近距离灭火两种灭火模式,机械臂爪上有两个喷头,分别为细喷头和粗喷头,细喷头可提供远距离灭火,粗喷头可提供近距离灭火。操作人员可以选择不同的模式,对不同程度的火情进行扑灭。
13.进一步优选的,细喷头的直径为3cm,粗喷头的直径为5cm。
14.优选的,控制模块树莓派为工作电压为5v的树莓派4b,采用树莓派官方的raspbian系统,搭载pwr.a53电源驱动板,集成了mjpg
‑
streamer推流服务,并默认将树莓派的无线网卡配置为ap热点模式,其特点是运行内存大、可实现无线网络wifi数据传输、引脚数量多,可实现多功能集成,能快速地实现命令下达与数据传输的功能。
15.优选的,机架前方设有传感器组和视频组,传感器组与控制模块51单片机连接,视频组包括舵机云台和置于其上的摄像头;摄像头可实时地观察机器人周边的现场状况,并将视频信息传送回系统中心;
16.传感器组包括烟雾传感器、甲烷传感器、火焰传感器、人体传感器、co传感器,共5种传感器,用以侦查巡检范围内的工作环境状态及判断是否有火情的发生,可实时反馈多种重要环境参数,各种气体传感器模块可以实时监测有害气体浓度的变化,极大减轻了工作人员的工作负担。
17.优选的,机架底部前方设有两个红外传感器和超声波模块,两个红外传感器与控制模块的树莓派连接,红外传感器用于探测路线轨迹,作为探测预设轨迹的传感器,当传感器返回的电平为0时,表明是正常地面,当传感器返回的电平是1时,表明是黑线。从而根据两个红外探头的状态,来判断车头的状态是处于黑线的何种位置,再对车身进行方向校准,每一次程序循环都会进行一次方向校准,直至小车一致保持与黑线平行的状态进而传感器不会被触发。在巡检阶段,红外线传感器扫描预设路线,控制机器人的行进。
18.超声波模块与控制模块树莓派主板连接,超声波模块用于通过时间差测距法来探测前方物体距离先锋消防机器人之间的距离,将距离数值信息反馈至控制模块,由控制模块控制先锋消防机器人的移动和停止,实时显示先锋消防机器人与前方障碍物之间的距
离,并可让机器人在靠近障碍物时转弯或者停止。
19.进一步优选的,红外传感器选用一部工作电压为5v的红外光电开关巡线循迹d80nk传感器。其特点是探测距离可调且探测距离远、受可见光干扰小、价格便宜、易于装配、使用方便、广泛应用于机器人避障流水线计件等众多场合。该模块能让机器人实现循迹侦查功能。
20.超声波模块选用一部工作电压为5v的hc
‑
sr04超声波雷达避障测距模块。其特点是性能稳定、精度高、盲区小、反馈速度快、模块高精度,能够进行稳定的测距,使用方法简单,兼容各种控制平台。该模块能让机器人实现避障测距功能。
21.优选的,机架侧面设有led屏,led屏与控制模块51单片机连接,可以由led屏显示消防救援车行进的方向,可以对被困人员进行方向提示,方便被困人员的撤离。
22.优选的,机架内部设有探照灯。用于补充光线。
23.优选的,哨兵无人机上的摄像头的数量为两个,一个位于前方,一个位于底部,一个可以传输前方区域视频影像,另一个位于正下方,可以对巡查区域进行细致检查。
24.机器人所实现的主要功能所对应的机械结构如下:
25.巡检功能:哨兵无人机、传感器组、超声波避障模块及红外循迹传感器、摄像头、探照灯、行走机构。
26.消防灭火功能:机械臂、破障钻头、水泵及水管。
27.疏散引导功能:哨兵无人机、led屏、大功率音响。
28.利用上述常态化火情巡检预警消防救援陆空机器人工作时,包括步骤如下:
29.(1)常规巡检,由哨兵无人机进行大范围高空视觉侦查,先锋消防机器人进行红外线巡迹和传感器侦查;侦查信息共同传输给控制端;
30.(2)当发现可疑火情点时,哨兵无人机执行高空声波警报疏散任务,同时利用摄像头执行高空红外热成像检测火情发展态势;先锋消防机器人利用传感器组和视频组执行传感器协同侦查并上传现场信息到控制端,同时利用灭火组件并执行初期消防灭火任务;
31.(3)当消防人员到达火场后,哨兵无人机执行火场周边环境侦查并上传视频信息至控制端,同时执行火场被困人员搜寻任务;先锋消防机器人利用led屏执行被困人员光源引领疏散任务,然后进入火场一线进行灭火。
32.本实用新型的有益效果在于:
33.本实用新型将地面机器人作为无人机的起落平台可随时根据火势大小出发无人机,起飞点无限制,更为灵活。
34.本实用新型将巡检、消防与疏导融为一体,从火情的侦查发现到消防控制,再到最终的人员搜寻撤离,该机器人均可发挥巨大作用。巡检发现初期火情后,先锋消防机器人将火情位置及信息进行上传、报警的同时,利用自身的消防装置进行初步灭火,同时哨兵无人机进行火场周边人员的疏散引导任务;若火势进一步扩大,先锋消防机器人配合消防人员深入火场一线进行灭火作业,哨兵无人机进行火场周边环境风向等侦察,保障救火作业区域的安全性。该机器人真正地将巡检、消防与疏导等功能融合在一起,极大的提高了消防工作的整体效率。
35.机械臂破障机构与消防喷头融为一体,破障机构可以破除机器人前方障碍物,提高先锋消防机器人的通过能力和处理消防死角能力,使机器人更全面地完成巡查、消防和
疏导任务。消防喷头可实现对火情的初步控制。破障机构与消防装置皆装备在机械臂上,可随机械臂的姿态进行工作角度调整,以适应不同的工作环境。同时机械臂前方的机械爪能够抓取火场中的易燃易爆危险物品,降低火场危险性的同时防止火势进一步扩大。
36.警示哨兵无人机与移动式先锋消防机器人搭配组合,提供多方位信息,哨兵无人机与先锋消防机器人配合使用,为消防机器人提供大范围视野,为寻找最佳救援路线与安全的逃生路线以及准确、快速地定位、救援被困人员提供了条件。同时,哨兵无人机还可以指引消防救援车以最佳路线到达火灾现场,并提供火场周边环境的基本情况,结合先锋消防机器人所传输的现场环境监测数据(温度、烟雾浓度等),尽快地制定消防救援方案,极大地缩短了救援时间。
37.高空大范围巡检与地面定期巡检相结合,本机器人采用哨兵无人机高空大范围巡检与先锋消防机器人地面定期巡检相结合的方式,综合哨兵无人机侦查到的现场环境状况与先锋消防机器人检测到的环境数据进行分析比较,能达到准确判断现场火情的目的。该方式增加了监管人员的工作范围和效率,提高了火情报警的及时性和准确性。
38.引导疏散模块和哨兵无人机高空指引可协助人群撤离疏散,当火势较大时,被困人员因浓烟无法辨别逃生方向,此时警示无人机能够通过高空摄像头观察火场情况并将信息反馈给操作人员,操作人员在确定安全的疏散路线后,使用先锋消防机器人的引导疏散模块指引被困人员安全快速逃生,与此同时哨兵无人机通过自带的大功率音响设备进行高空指挥,引导被困人员有序疏散撤离。
39.本机器人将侦测巡检环境与对失火现场进行灭火并引导疏散被困人员等诸多功能融于一体,程序化地执行从火情的侦查发现到灭火消防,再到被困人员的撤离等工作,充分利用了一般救援模式的时间空挡,提高了消防救援的效率,减少了人民的生命财产损失,使救援效果最大化,在复杂环境下,多台机器人可以相互协调,进行通讯与信息传输、信息交互及冲突消除。
附图说明
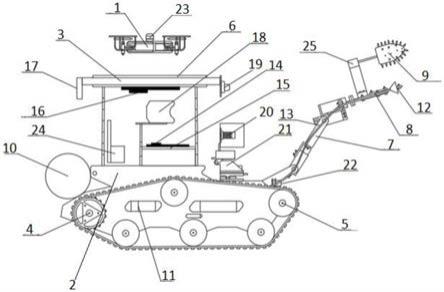
40.图1为本实用新型先锋消防机器人和哨兵无人机结构示意图;
41.图2为本实用新型先锋消防机器人控制模块与控制端的数据传输示意图;
42.图3为本实用新型先锋消防机器人、哨兵无人机、控制端的数据传输示意图;
43.图4为喷头结构示意图;
44.其中:1、哨兵无人机,2、先锋消防机器人,3、机架,4、驱动轮,5、辅助轮,6、停机坪,7、机械臂,8、机械爪,9、破障钻头,10、水箱,11、电控水泵,12、喷头,12
‑
1、洗喷头,12
‑
2、粗喷头,13、水管,14、树莓派,15、电源驱动板pwr.a53,16、51单片机,17、led屏,18、探照灯,19、传感器组,20、摄像头,21、舵机云台,22、超声波模块,23、音响,24、继电器,25、直流电机。
具体实施方式
45.下面通过实施例并结合附图对本实用新型做进一步说明,但不限于此。
46.实施例1:
47.一种常态化火情巡检预警消防救援陆空机器人,包括先锋消防机器人2和哨兵无
人机1,
48.先锋消防机器人包括机架3,机架下方设有驱动轮4,驱动轮4和辅助轮5组成驱动机构,实现机器人的行使,机架上方设有停机坪6,停机坪用于停放哨兵无人机,机架内部设有控制模块,机架前端设有机械臂7,机械臂上设有灭火组件;
49.控制模块包括51单片机16和树莓派14,树莓派可通过信号串口向51单片机发送高低电平,51单片机接收到信号做出不同反应并将信号再返回树莓派进行校准,树莓派通过无线传输与控制端连接;
50.机械臂前端设有机械爪8和破障钻头9,机械爪由两台可控电动舵机驱动,为四自由度,破障钻头由一台电机驱动,可控电动舵机和钻头直流电机25均连接至控制模块树莓派;可通过电脑wifi远程控制机械臂的姿态及钻头的角度,用以解决机器人在复杂工作环境中因为地形限制、障碍物阻挡等导致机器人无法正常行进的问题,同时此机构可在特殊火灾情况中代替消防人员进入无法进入的区域。该机构的机械爪在火灾现场可代替消防人员抓取危险易爆物品,给消防人员的生命安全增加一份保障。机械臂选用两部工作电压为4.8~6v的995舵机串联组合而成。其特点是可实现四自由度姿态调整并可实现机械手的夹持功能,还有扭矩大、可防卡死。该机械臂能让机器人实现调整消防作业角度以及破障抓取功能。
51.舵机是由pwm电源驱动板来控制角度,pwm的高电平时间0.5
‑
2.5ms对应舵机的0
°‑
180
°
,舵机两端有死区,长时间工作在死区,会导致舵机损坏,一般会让舵机工作在20
°‑
160
°
之间。
52.灭火组件包括水箱10、电控水泵11,电控水泵与控制模块树莓派连接,由控制模块树莓派控制水泵的吸、排及功率大小,电控水泵入水口与水箱通过软管连接,电控水泵排水口通过软管连接至喷头12,喷头设于机械臂前端,操作人员能够通过控制机械臂的姿态,调整水柱的喷射角度及距离,对异常热源进行降温冷却以及对火情进行扑灭。
53.哨兵无人机上设有32飞控模块及与其连接的摄像头、语音传输模块,32飞控模块通过无线传输连接至控制端(如图3),控制端为电脑或手机,由人员操作;可以进行远距离高空喊话,用于消防灭火路线引导、被困人员疏散引导等。
54.机架前方设有传感器组和视频组,传感器组与控制模块51单片机连接,视频组包括舵机云台和置于其上的摄像头;摄像头可实时地观察机器人周边的现场状况,并将视频信息传送回系统中心;传感器组包括烟雾传感器、甲烷传感器、火焰传感器、人体传感器、co传感器,共5种传感器,用以侦查巡检范围内的工作环境状态及判断是否有火情的发生,可实时反馈多种重要环境参数,各种气体传感器模块可以实时监测有害气体浓度的变化,极大减轻了工作人员的工作负担。
55.控制模块树莓派为工作电压为5v的树莓派4b,采用树莓派官方的raspbian系统,搭载pwr.a53电源驱动板,集成了mjpg
‑
streamer推流服务,并默认将树莓派的无线网卡配置为ap热点模式,其特点是运行内存大、可实现无线网络wifi数据传输、引脚数量多,可实现多功能集成,能快速地实现命令下达与数据传输的功能。如图2所示。
56.树莓派通过采集挂载在usb接口的mjpg格式的舵机云台上的摄像头的数据,并编码封装成http协议的视频流,默认推送到8080端口。android/pc设备,连接到raspberry pi的热点后,打开控制软件,会自动从8080端口获取mjpg视频流,并进行解码、显示。由此实现
了本机器人的实时视频传输功能。
57.本技术无线传输的原理如下:本机器人的树莓派、32飞控模块内部主程序(python)开通了tcp server,在开机自启动后监听2001端口,等待操控端tcp client的连接。当android/pc设备连接到树莓派的热点后,打开控制软件,开始作为tcp client,通过2001端口,跟tcp server握手。此时,上位机控制软件既可以write触发的指令到2001端口,由主程序对指令进行解析、执行;也可以持续read由树莓派的程序推送到2001端口的数据(如超声波测的距离),并进行显示。由此实现本机器人的双向数据转发功能。
58.实施例2:
59.一种常态化火情巡检预警消防救援陆空机器人,其结构如实施例1所述,所不同的是,喷头包括两个,分别为细喷头12
‑
1和粗喷头12
‑
2,细喷头的直径为3cm,粗喷头的直径为5cm。两个喷头分别设有控制开关,控制开关与控制模块树莓派连接。按照水泵功率大小及火场需要,设计出的灭火喷头共有远距离灭火、近距离灭火两种灭火模式,机械臂爪上有两个喷头,分别为细喷头和粗喷头,细喷头可提供远距离灭火,粗喷头可提供近距离灭火。操作人员可以选择不同的模式,对不同程度的火情进行扑灭。
60.实施例3:
61.一种常态化火情巡检预警消防救援陆空机器人,其结构如实施例1所述,所不同的是,机架底部前方设有两个红外传感器和超声波模块,两个红外传感器与控制模块的树莓派连接,红外传感器用于探测路线轨迹,作为探测预设黑线轨迹的传感器,当传感器返回的电平为0时,表明是正常地面,当传感器返回的电平是1时,表明是黑线。从而根据两个红外探头的状态,来判断车头的状态是处于黑线的何种位置,再对车身进行方向校准,每一次程序循环都会进行一次方向校准,直至小车一致保持与黑线平行的状态进而传感器不会被触发。在巡检阶段,红外线传感器扫描预设路线,控制机器人的行进。
62.红外传感器选用一部工作电压为5v的红外光电开关巡线循迹d80nk传感器。其特点是探测距离可调且探测距离远、受可见光干扰小、价格便宜、易于装配、使用方便、广泛应用于机器人避障流水线计件等众多场合。该模块能让机器人实现循迹侦查功能。
63.该红外传感器前端包含一个红外发射头和
‑
个红外接收头,通过尾部旋钮来调整红外发射强度(顺时针增强,逆时针诚弱)。红外线照射到物体表面后发生反射,红外接收头在接受到反射回来的红外光信号后,会改变自身电阻,当反射线强度大到一定程度,电阻低于设定值会触发比较器状态变化,输出低电平,在机器人看来就是检测到障碍物。障碍物距离越近,反射强度越强;障碍物距离越远,反射强度越弱;表面颜色不同,反射率不同,白色最强,黑色最弱。
64.超声波模块与控制模块树莓派主板连接,超声波模块用于通过时间差测距法来探测前方物体距离先锋消防机器人之间的距离,将距离数值信息反馈至控制模块,由控制模块控制先锋消防机器人的移动和停止,实时显示先锋消防机器人与前方障碍物之间的距离,并可让机器人在靠近障碍物时转弯或者停止。
65.超声波模块选用一部工作电压为5v的hc
‑
sr04超声波雷达避障测距模块。其特点是性能稳定、精度高、盲区小、反馈速度快、模块高精度,能够进行稳定的测距,使用方法简单,兼容各种控制平台。该模块能让机器人实现避障测距功能。
66.实施例4:
67.一种常态化火情巡检预警消防救援陆空机器人,其结构如实施例3所述,所不同的是,机架侧面设有led屏,led屏与控制模块51单片机连接,可以由led屏显示消防救援车行进的方向,可以对被困人员进行方向提示,方便被困人员的撤离。
68.利用本实施例所述常态化火情巡检预警消防救援陆空机器人的工作方法,包括步骤如下:
69.(1)常规巡检,由哨兵无人机进行大范围高空视觉侦查,先锋消防机器人进行红外线巡迹和传感器侦查;侦查信息共同传输给控制端;
70.(2)当发现可疑火情点时,哨兵无人机执行高空声波警报疏散任务,同时利用摄像头执行高空红外热成像检测火情发展态势;先锋消防机器人利用传感器组和视频组执行传感器协同侦查并上传现场信息到控制端,同时利用灭火组件并执行初期消防灭火任务;
71.(3)当消防人员到达火场后,哨兵无人机执行火场周边环境侦查并上传视频信息至控制端,同时执行火场被困人员搜寻任务;先锋消防机器人利用led屏执行被困人员光源引领疏散任务,然后进入火场一线进行灭火。
72.实施例5:
73.一种常态化火情巡检预警消防救援陆空机器人,其结构如实施例1所述,所不同的是,机架内部设有探照灯。用于补充光线。
74.实施例6:
75.一种常态化火情巡检预警消防救援陆空机器人,其结构如实施例1所述,所不同的是,哨兵无人机上的摄像头的数量为两个,一个位于前方,一个位于底部,一个可以传输前方区域视频影像,另一个位于正下方,可以对巡查区域进行细致检查。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1