一种新型高空消防灭火机器人的制作方法
1.本实用新型涉及特种机器人领域,具体地说是涉及一种新型高空消防灭火机器人。
背景技术:
2.消防机器人作为特种机器人的一种,在灭火和抢险救援中愈加发挥举足轻重的作用。当前,随着城市高层、超高层建筑日益增多,几十米甚至上百米的高楼一旦发生火灾,会面临消防难题。目前主流的灭火方式是采用高空无人机灭火,或采用折叠式的云梯结构等举升装置将喷射灭火设备送入高层建筑,实现对中高空建筑灭火。其中,无人机携带灭火载荷少,空中作业时间短,不能长时间、大载重的开展高层消防救援作业。采用举升装置存在喷射角度调节困难等问题,无法实现智能化作业。
技术实现要素:
3.基于上述技术问题,本实用新型提出一种新型高空消防灭火机器人。
4.本实用新型所采用的技术解决方案是:
5.一种新型高空消防灭火机器人,包括移动底盘、承载底座、高空抬升组件和喷射灭火系统;
6.所述移动底盘包括底盘本体,在底盘本体的两侧设置有行走履带,在底盘本体上设置有用于驱动行走履带行进和转向的驱动装置;
7.所述承载底座设置于底盘本体的上方,高空抬升组件和喷射灭火系统均设置在承载底座上;
8.所述高空抬升组件包括伸缩臂架,伸缩臂架的底端与承载底座铰接,在承载底座上还设置有用于驱动伸缩臂架转动的第一液压缸,第一液压缸的缸体固定在承载底座上,第一液压缸的缸杆末端与伸缩臂架的下部铰接;
9.所述喷射灭火系统包括水喷射灭火系统和干粉喷射灭火系统,水喷射灭火系统包括水箱、水输送管路和水射流喷头,水箱通过水输送管路与水射流喷头相连接;所述干粉喷射灭火系统包括干粉喷头、干粉管路、电磁阀、干粉罐和氮气罐,干粉喷头与干粉管路的一端连接,干粉管路的另一端连接干粉罐和氮气罐,电磁阀设置在干粉管路上;
10.所述水箱设置在承载底座的上方,干粉罐和氮气罐设置于水箱上方的一侧;所述水射流喷头和干粉喷头均固定在执行末端,执行末端连接在伸缩臂架的末端部。
11.优选的,在伸缩臂架的末端设置有转动调整臂,转动调整臂的一端与带动其在竖直平面内旋转的第一电机的转轴传动连接,第一电机安装在伸缩臂架的末端处;所述执行末端设置在转动调整臂的另一端。
12.优选的,所述执行末端安装在支撑架上,在转动调整臂的另一端还设置有用于带动执行末端沿竖直平面转动的第二电机,以及用于带动执行末端沿水平平面转动的第三电机。
13.优选的,所述伸缩臂架包括多节臂段,多节臂段通过内置的第二液压缸和钢丝绳联动展开和收回。
14.优选的,所述伸缩臂架包括五节臂段,伸缩臂架展开后从下至上依次为第一节臂段、第二节臂段、第三节臂段、第四节臂段和第五节臂段;
15.第一节臂段的底部通过铰接座与承载底座铰接,第二节臂段内置于第一节臂段中,第三节臂段内置于第二节臂段中,第二液压缸设置在第一节臂段的内部,第二液压缸倒置布置,第二液压缸的缸杆末端与第一节臂段的底面连接,第二液压缸的缸筒与第二节臂段连接,第二液压缸的缸筒穿入第三节臂段中;
16.在第二液压缸的缸筒末端设置有第一定滑轮,第一钢丝绳的一端与第三节臂段连接,第一钢丝绳的另一端绕过第一定滑轮并与第一节臂段连接;
17.在第三节臂段的顶部一角处设置有第二定滑轮,第二钢丝绳的一端与第二节臂段的顶部连接,第二钢丝绳的另一端绕过第二定滑轮与第四节臂段的底部连接;
18.在第四节臂段的顶部一角处设置有第三定滑轮,第三钢丝绳的一端与第三节臂段的顶部连接,第三钢丝绳的另一端绕过第三定滑轮与第五节臂段的底部连接;
19.在第二节臂段的底部一角处设置有第四定滑轮,第四钢丝绳的一端与第一节臂段连接,第四钢丝绳的另一端绕过第四定滑轮与第三节臂段连接。
20.优选的,在伸缩臂架的外侧且顺沿其伸展方向设置有拖链,所述水输送管路和干粉管路均内置于拖链中。
21.优选的,在底盘本体的前后两端对称设置有多个调平支腿。
22.优选的,在执行末端的顶部还设置有喷淋头,所述喷淋头与水输送管路相连通。
23.优选的,在干粉喷头的末端处还设置有火焰识别装置。
24.优选的,在底盘本体的前后两端均设置有激光雷达和全景相机。
25.本实用新型的有益技术效果是:
26.本实用新型通过高空抬升组件对执行末端进行举高,从而可进行高空位置处的喷射灭火,高空抬升组件采用伸缩臂架结构,伸缩臂架的角度通过第一液压缸进行控制;伸缩臂架包括多节臂段,多节臂段通过内置的第二液压缸和钢丝绳联动实现展开和收回,采用该结构方式具有伸缩简便,调节容易等优点,可在竖直或倾斜状态下自由伸缩,而且成本低。
27.本实用新型还通过伸缩臂架末端的转动调整臂实现执行末端竖直面内大幅度的俯仰调节,并可通过第二电机、第三电机等调整电机实现执行末端在竖直面和水平面内的旋转微调,可快速精准的实现喷射灭火。
28.本实用新型通过在干粉喷头的末端处设置火焰识别装置,可迅速锁定火源位置,并尽快执行干粉喷射灭火和水射流灭火动作。
29.本实用新型通过设置拖链,可对其内部布置的水输送管路等起到防护作用,而且整体收缩更为简洁规整。
30.本实用新型通过调平支腿的设置,可进行调平动作,在斜面等处也可实现消防机器人的平稳固定。
附图说明
31.下面结合附图与具体实施方式对本实用新型作进一步说明:
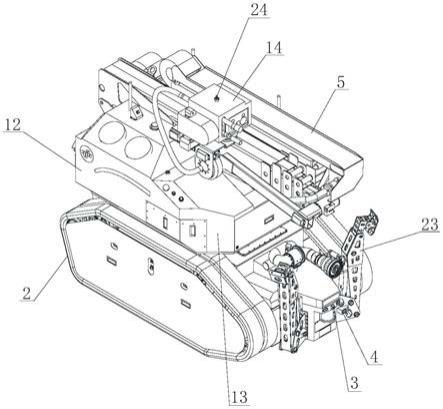
32.图1为本实用新型高空消防灭火机器人收缩后的结构示意图;
33.图2为图1的侧向视图;
34.图3为本实用新型高空消防灭火机器人高空抬升组件伸展开后的结构示意图;
35.图4为图3的另一角度视图;
36.图5为图4的局部放大图;
37.图6为本实用新型高空消防灭火机器人中调平支腿的结构示意图;
38.图7为本实用新型高空消防灭火机器人中伸缩臂架的结构原理示意图;
39.图8为本实用新型高空消防灭火机器人高空抬升组件伸展开后的第三角度视图;
40.图9为本实用新型高空消防灭火机器人高空抬升组件伸展开后的第四角度视图;
41.图10为图9的局部放大图。
具体实施方式
42.结合附图,一种新型高空消防灭火机器人,包括移动底盘、承载底座、高空抬升组件和喷射灭火系统。所述移动底盘包括底盘本体1,在底盘本体1的两侧设置有行走履带2,在底盘本体1上还设置有驱动装置,通过驱动装置和轮系组件驱动行走履带进行行进和转向动作。所述承载底座21设置于底盘本体1的上方,高空抬升组件和喷射灭火系统均设置在承载底座上。所述高空抬升组件包括伸缩臂架5,伸缩臂架5的底端与承载底座铰接,在承载底座上还设置有用于驱动伸缩臂架转动的第一液压缸6,第一液压缸的缸体固定在承载底座上,第一液压缸的缸杆末端与伸缩臂架5的下部铰接。
43.所述喷射灭火系统包括水喷射灭火系统和干粉喷射灭火系统,水喷射灭火系统包括水箱7、水输送管路8和水射流喷头9,水箱7通过水输送管路8与水射流喷头9相连接。所述干粉喷射灭火系统包括干粉喷头10、干粉管路11、电磁阀、干粉罐12和氮气罐13,干粉喷头与干粉管路的一端连接,干粉管路的另一端连接干粉罐12和氮气罐13,电磁阀设置在干粉管路上。所述水箱7设置在承载底座的上方,干粉罐12和氮气罐13设置于水箱7上方的一侧。所述水射流喷头9和干粉喷头10均固定在执行末端14,执行末端14连接在伸缩臂架5的末端部。
44.在伸缩臂架5的末端设置有转动调整臂15,转动调整臂的一端与带动其在竖直平面内旋转的第一电机16的转轴传动连接,第一电机16安装在伸缩臂架5的末端处。所述执行末端14设置在转动调整臂15的另一端。所述执行末端安装在支撑架17上,在转动调整臂的另一端还设置有用于带动执行末端14沿竖直平面转动的第二电机18,以及用于带动执行末端14沿水平平面转动的第三电机19。
45.上述伸缩臂架5包括多节臂段,多节臂段通过内置的第二液压缸20和钢丝绳联动展开和收回。具体地,所述伸缩臂架包括五节臂段,伸缩臂架展开后从下至上依次为第一节臂段501、第二节臂段502、第三节臂段503、第四节臂段504和第五节臂段505。第一节臂段501的底部通过铰接座506与承载底座铰接,第二节臂段502内置于第一节臂段501中,第三节臂段503内置于第二节臂段502中。第二液压缸20设置在第一节臂段501的内部,第二液压缸倒置布置,第二液压缸的缸杆201末端与第一节臂段的底面连接,第二液压缸的缸筒202
与第二节臂段连接,第二液压缸的缸筒穿入第三节臂段中。
46.在第二液压缸的缸筒末端设置有第一定滑轮507,第一钢丝绳508的一端与第三节臂段连接,第一钢丝绳的另一端绕过第一定滑轮并与第一节臂段连接。在第三节臂段的顶部一角处设置有第二定滑轮509,第二钢丝绳的一端与第二节臂段的顶部连接,第二钢丝绳5010的另一端绕过第二定滑轮与第四节臂段的底部连接。在第四节臂段的顶部一角处设置有第三定滑轮5011,第三钢丝绳5012的一端与第三节臂段的顶部连接,第三钢丝绳的另一端绕过第三定滑轮与第五节臂段的底部连接。通过第二液压缸的顶升动作,配合相应位置处的定滑轮和钢丝绳连接结构,可实现各节臂段的同步伸展。
47.在第二节臂段的底部一角处设置有第四定滑轮5013,第四钢丝绳5014的一端与第一节臂段连接,第四钢丝绳的另一端绕过第四定滑轮与第三节臂段连接。通过第二液压缸的伸缩动作以及第四定滑轮5013和第四钢丝绳5014的配合,可实现各节臂段的收缩。
48.本实用新型通过高空抬升组件对执行末端进行举高,从而可进行高空位置处的喷射灭火,高空抬升组件采用伸缩臂架结构,伸缩臂架的角度通过第一液压缸进行控制。伸缩臂架包括多节臂段,多节臂段通过内置的第二液压缸和钢丝绳联动实现展开和收回,采用该结构方式具有伸缩简便,调节容易等优点,可在竖直或倾斜状态下自由伸缩,而且成本低。
49.作为对本实用新型的进一步设计,在伸缩臂架的外侧且顺沿其伸展方向设置有拖链22,所述水输送管路8和干粉管路11均内置于拖链22中。通过拖链22的设置,可对其内部布置的水输送管路等起到防护作用,而且整体收缩更为简洁规整。
50.更进一步的,在底盘本体的前后两端对称设置有多个调平支腿23,所述调平支腿23包括第一支臂231、摆臂232和摆臂液压缸233,第一支臂固定在底盘本体上,第一支臂的下部与摆臂的一端铰接,摆臂的另一端连接支撑盘。摆臂液压缸233的缸体与第一支臂的上部铰接,摆臂液压缸的缸杆末端与摆臂靠近连接支撑盘234的端部铰接。在摆臂液压缸上配置有摆臂控制电池阀235。本实用新型通过调平支腿的设置,可进行调平动作,在斜面等处也可实现消防机器人的平稳固定。
51.进一步的,在执行末端的顶部还设置有喷淋头24,所述喷淋头与水输送管路相连通。通过喷淋头可对执行末端的周围进行喷淋降温。
52.更进一步的,在干粉喷头的末端处还设置有火焰识别装置25,通过火焰识别装置25可迅速锁定火源位置,并尽快执行干粉喷射灭火和水射流灭火动作。在底盘本体的前后两端均设置有激光雷达3和全景相机4,可进行相应的探测和摄像工作。
53.上述方式中未述及的部分采取或借鉴已有技术即可实现。
54.需要说明的是,在本说明书的教导下,本领域技术人员所作出的任何等同替代方式,或明显变形方式,均应在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1