一种视觉皮壳定位机的制作方法
1.本技术涉及盒生产的领域,尤其是涉及一种视觉皮壳定位机。
背景技术:
2.在糊盒加工工序中,将过胶后的面纸与盒胚进行定位,是糊盒工序中不可或缺的步骤,影响着糊盒的质量。
3.相关技术中的糊盒定位是在用于运输面纸和盒胚的传输带两侧设置挡板或限位板类的限位机构,当盒胚与限位机构接触时,如果盒胚的位置不准确,则会受到限位机构的挤压,发生移动,改变当前位置,达到纠偏的目的。
4.针对上述中的相关技术,发明人认为仅对盒胚的位置进行纠偏,需要保证面纸相对于传送带的位置精度,一旦面纸在传送带上的位置发生偏移,反而容易降低盒胚与面纸之间的位置精度,提高了次品率。
技术实现要素:
5.为了有助于提高面纸在传送带上的位置精度,降低次品率,本技术提供一种视觉皮壳定位机。
6.本技术提供的一种视觉皮壳定位机采用如下的技术方案:
7.一种视觉皮壳定位机,包括机架,所述机架中设有用于传输面纸的传送组件;所述机架上设有位于所述传送组件上方,且用于搬移盒胚的夹持组件;
8.所述传送组件包括传动辊、驱动器和传送带,所述传动辊与机架的一端转动连接,所述驱动器连接在机架一端的外侧壁上,且驱动器的输出端与对应传动辊的一端连接,所述传送带套设在两个传动辊上;
9.所述传送带上设有若干用于承托面纸的橡胶承托座。
10.通过采用上述技术方案,橡胶承托座用于承托面纸,具有一定的提示作用。当面纸偏移橡胶承托座时,便于被工人发现,而后对上料设备进行调试或者对上料工人进行提醒。使放置到橡胶承托座上的面纸位置精度提高,便于提高面纸与传送带之间的位置精度,从而有助于降低次品率。
11.可选的,所述橡胶承托座与所述传送带可拆卸连接。
12.通过采用上述技术方案,橡胶承托座能够拆离传送带,从而便于工人对传送带上的橡胶承托座进行更换。当传送带需要传输其他型号的面纸时,在传送带上安装与之匹配的橡胶承托座,有助于提高面纸位于传送带上的位置精度,从而有助于降低次品率。
13.可选的,所述橡胶承托座的一侧设有橡胶插接凸棱,所述传送带上设有用于供所述橡胶插接凸棱插入的插入槽;所述橡胶插接凸棱的横截面面积与所述插入槽的横截面面积相同。
14.通过采用上述技术方案,橡胶承托座通过橡胶插接凸棱与传送带实现可拆卸连接,拆卸方便,更换快捷。且橡胶插接凸棱的横截面面积与插入槽的横截面面积相同,有助
于提高橡胶插接凸棱的稳定性,使橡胶插接凸棱不易在插接槽中发生移动。从而有助于提高橡胶承托座位于传送带上的位置精度,提高了面纸的位置精度,降低了次品率。
15.可选的,所述橡胶承托座的同一侧设有多个所述橡胶插接凸棱。
16.通过采用上述技术方案,进一步提高了橡胶承托座与传送带的连接稳定性,从而提高了橡胶承托座位于传送带上的位置精度。使面纸的位置精度得到保证,有助于降低次品率。
17.可选的,所述橡胶插接凸棱远离所述橡胶承托座的一侧设有橡胶限位板。
18.通过采用上述技术方案,橡胶限位板进入到插接槽中后,对橡胶插接凸棱具有限位作用,使橡胶承托座不易脱离传送带。提高了橡胶承托座的稳定性。
19.可选的,所述夹持组件的一侧设有与机架连接的视觉检测器,所述视觉检测器电连接有控制器,所述控制器与所述夹持组件电连接。
20.通过采用上述技术方案,将盒胚放置到面纸上之前,视觉检测器对面纸的位置进行检测,而后将检测结果传输给控制器。控制器根据获取的传输结果控制夹持组件,将盒胚放置到面纸上,有助于提高盒胚与面纸间的位置精度。在保证了面纸位于传送带上的位置精度后,根据面纸位置放置盒胚,使面纸与盒胚之间的位置不易产生较大的误差,有助于降低次品率。
21.可选的,所述夹持组件包括与机架连接的旋转气缸,所述旋转气缸的输出端连接有水平设置的连接板,所述连接板上安装有水平设置的第一电缸,所述第一电缸的输出端连接有第二电缸,所述第一电缸输出端的移动方向与所述第二电缸输出端的移动方向垂直;所述第二电缸的输出端连接有竖直设置的动力缸,所述动力缸的输出端连接有吸盘,所述连接板上设有与吸盘连接的真空发生器;
22.所述旋转气缸、第一电缸、第二电缸、动力缸和真空发生器均与控制器电连接。
23.通过采用上述技术方案,通过第一电缸和第二电缸对盒胚的位置进行调节,结构简单,进给稳定,有助于提高调节精度。从而有助于提高盒胚相对于面纸的位置精度,降低次品率。
24.可选的,所述夹持组件远离所述视觉检测器的一侧设有与机架连接的限位板。
25.通过采用上述技术方案,限位板便于工人对盒胚的位置进行检测,如果盒胚不会与限位板发生接触,则表明盒胚的位置正确。若盒胚与限位板发生了接触,则表明盒胚的位置与预计的位置发生了偏移,工人及时排查问题源,降低次品率。
26.综上所述,本技术包括以下至少一种有益技术效果:
27.1.传送组件用于带动面纸和盒胚移动,在将面纸通过机械或人工放置到传送带上时,使面纸与橡胶承托座对应设置,即面纸铺设在橡胶承托座上,橡胶承托座起到校准和限位的作用,有助于提高面纸位于传送带上的位置精度,从而有助于提高面纸和盒胚的定位精度,降低了次品率;
28.2.橡胶承托座与传送带可拆卸连接,便于工人根据不同的面纸使用不同的橡胶承托座,有助于提高面纸位于传送带上的位置精度,从而有助于降低次品率。
附图说明
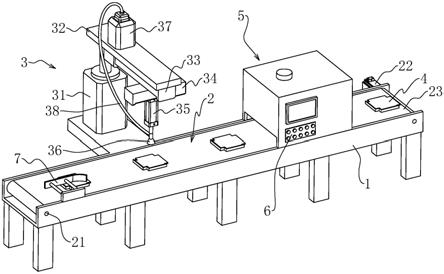
29.图1是视觉皮壳定位机的整体结构示意图;
30.图2是橡胶承托座的相关结构示意图;
31.图3是橡胶承托座的后视图。
32.附图标记说明:1、机架;2、传送组件;21、传动辊;22、驱动器;23、传送带;24、插入槽;3、夹持组件;31、旋转气缸;32、连接板;33、第一电缸;34、第二电缸;35、动力缸;36、吸盘;37、真空发生器;38、通气管;4、橡胶承托座;41、橡胶插接凸棱;42、橡胶限位板;43、限位凸棱;5、视觉检测器;6、控制器;7、限位板。
具体实施方式
33.本技术实施例公开一种视觉皮壳定位机。参照图1,一种视觉皮壳定位机包括机架1、视觉检测器5、控制器6、传送组件2和夹持组件3。视觉检测器5用于对传送组件2上的面纸位置进行检测,而后将面纸的位置信息传输给控制器6,控制器6与视觉检测器5和夹持组件3均电连接。控制器6接收到面纸的位置信息后,根据面纸的位置信息对夹持组件3进行控制,使夹持组件3将盒胚夹持到面纸上。
34.参照图1,传送组件2用于传输面纸,面纸可通过人工放置到传送组件2上,也可以通过上料设备输送到传送组件2中。传送组件2包括传动辊21、驱动器22和传送带23。传动辊21共设置两个,两个传动辊21分别转动连接在机架1的一端,且水平设置。驱动器22设置为旋转电机,连接在机架1一端的外侧壁上。驱动器22的输出端通过轴承穿过机架1连接在与其位于机架1同一端的传动辊21上,用于带动该传动辊21转动。传送带23套设在两个传动辊21上,启动驱动器22后,驱动器22带动与其连接的传动辊21转动,从而带动传送带23转动。
35.参照图2,传送带23上设有若干用于承托面纸的橡胶承托座4,橡胶承托座4由橡胶材质制成,能够跟随传送带23转动。橡胶承托座4的外形和尺寸根据需要运输的面纸设计,即确定需要输送的面纸后,根据该面纸的表面积和外形形状设计橡胶承托座4,使橡胶承托座4的横截面面积与面纸的横截面面积相同,使橡胶承托座4的形状与面纸的形状相同。工人将面纸放置到橡胶承托座4上后,面纸的外边缘与橡胶承托座4的外边缘吻合,有助于提高面纸在传送带23上的位置精度,也便于工人发现位置发生歪斜的面纸。
36.参照图2和图3,橡胶承托座4与传送带23可拆卸连接,具体的,橡胶承托座4的一侧设有橡胶插接凸棱41,橡胶插接凸棱41与橡胶承托座4一体成型,均为橡胶材质。传送带23上设有用于供橡胶插接凸棱41插入的插入槽24,且橡胶插接凸棱41的横截面面积与插入槽24的横截面面积相同。有助于提高橡胶承托座4的稳定性。
37.参照图3,橡胶承托座4的同一侧设有多个橡胶插接凸棱41,且橡胶插接凸棱41远离橡胶承托座4的一侧设有橡胶限位板42。橡胶限位板42与橡胶承托座4一体成型。结合图2,工人在安装橡胶承托座4时,将橡胶插接凸棱41和橡胶限位板42挤压到插入槽24中即可。由于橡胶限位板42在插入槽24中没有对应的存放空间,因此受到挤压产生形变,有助于提高橡胶承托座4与传送带23之间的摩擦力,从而使橡胶承托座4不易发生移动,或脱离传送带23。
38.参照图2,橡胶承托座4远离传送带23一侧的外边缘设有限位凸棱43,限位凸棱43用于与面纸的外边缘接触。为了便于上料装置将面纸输送到橡胶承托座4上,或者便于工人将面纸放置到橡胶承托座4上,限位凸棱43仅设置在橡胶承托座4一侧的外边缘上。具体以能够将面纸插入到橡胶承托座4上为准。
39.参照图1,视觉检测器5设置为ccd视觉检测系统,且与机架1连接。控制器6设置为mcu或单片机,连接在机架1或视觉检测器5上。视觉检测器5对移动到其检测范围内的面纸位置进行检测,而后将检测到的位置信息传输给控制器6。控制器6根据面纸的位置信息控制夹持组件3,将盒胚放置到面纸上。
40.参照图1,夹持组件3位于传送组件2的上方,且位于视觉检测器5远离视觉皮壳定位机上料端的一侧。夹持组件3用于搬移盒胚,夹持组件3包括与机架1连接且竖直设置的旋转气缸31,旋转气缸31的输出端位于上方且连接有水平设置的连接板32。连接板32上安装有水平设置的第一电缸33,第一电缸33的输出端连接有第二电缸34,第一电缸33输出端的移动方向与第二电缸34输出端的移动方向垂直。即第一电缸33的长度方向与第二电缸34的长度方向垂直。第二电缸34的输出端连接有竖直设置的动力缸35,动力缸35可以是气缸或油缸。动力缸35的输出端位于下方,且连接有吸盘36。吸盘36的上端连接有通气管38,通气管38远离吸盘36的一端与一真空发生器37的吸气口连接。真空发生器37安装在连接板32上。旋转气缸31、第一电缸33、第二电缸34、动力缸35和真空发生器37均与控制器6电连接。
41.控制器6得知面纸的位置信息后,控制旋转气缸31旋转,动力缸35输出端下移,真空发生器37使吸盘36内部形成负压。当吸盘36跟随动力缸35的输出端移动到盒胚附近时,将盒胚吸起。而后动力缸35输出端上移,旋转气缸31将动力缸35转动至传送带23的上方。第一电缸33和第二电缸34对盒胚的位置进行调节,最后控制器6控制动力缸35的输出端下移,真空发生器37制动,使盒胚脱离吸盘36,位于面纸上。
42.参照图1,夹持组件3远离视觉检测器5的一侧设有与机架1连接的限位板7,限位板7所处高度高于橡胶承托座4上表面所处高度,限位板7向靠近传送带23竖直中心面的方向延伸。
43.本技术实施例一种视觉皮壳定位机的实施原理为:若为人工上料,则工人根据橡胶承托座4的位置将面纸放置到橡胶承托座4上,有助于提高面纸在传送带23上的位置精度。若为机械上料,则根据橡胶承托座4的位置向定位机中输送面纸。面纸跟随橡胶承托座4移动至视觉检测器5下方,视觉检测器5获取面纸位置,并将面纸的位置信息传输给控制器6。控制器6根据面纸的位置信息控制夹持组件3将盒胚放置到面纸上,有助于提高面纸和盒胚之间的位置精度,从而有助于使后期在对面纸和盒胚进行压合时,提高成品盒的质量,降低次品率。
44.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1