一种基于VR技术的深水压井井控多岗位协同演练系统及方法与流程
一种基于vr技术的深水压井井控多岗位协同演练系统及方法
技术领域
1.本发明涉及海洋钻井模拟领域,尤其涉及一种基于vr技术的深水压井井控多岗位协同演练系统及方法。
背景技术:
2.压井是采用加重钻井液替入井内,并把侵入井内的地层流体循环出来的作业。在钻井过程中,当出现溢流、井涌或井喷时,必须采取正确措施,立即关井,并记录关井立管压力和关井套管压力。如果关井立管压力大于0,说明地层压力已大于钻井液柱静液压力,地层与井眼系统已失去平衡,这时我们必须立即压井来恢复和重建压力平衡关系。压井的原则应当是既保证压井安全,又必须使作用于井筒的应力最小。
3.近几年来,随着世界各地深水钻井勘探作业范围的不断扩大,作业水深也不断增加,深水井控问题也越来越突出。对于新进员工或石油相关专业学生,他们对钻井的过程、钻机的操作或者发生事故时的处理方法都没有感性的认识,当发生溢流后,由对于现场压井操作不熟悉,一旦出现操作失误或不慎,有可能引发严重的质量事故或安全事故,为国家和人民带来重大的损失。因此,钻井从业人员的上岗知识培训和专业技能培训显得十分重要。但由于几乎所有的钻井现场和设施都分布在海上,不可能将培训放到现场进行,如果仅依靠常规的课堂教学或实验室操作,由于缺乏形象逼真、直观生动的辅助手段和方式,不免陷入课程内容简单枯燥、学员学习效果差的尴尬局面,培训难以达到预期效果。同时,需要多工种立体交叉协同作业,而传统的钻井模拟培训系统大多为单机版,培训岗位主要为司钻,其他岗位如副司钻、井架工、外钳工、内钳工、场地工等几乎无法参与或参与度很低,无法实现多岗位、多工种协同作业,且建造成本高、沉浸感差,现场模拟完成度低,无法真实还原作业现场。
技术实现要素:
4.本发明的目的在于克服现有技术的不足,为在深海进行压井操作的培训,提供一种基于vr技术的深水压井井控多岗位协同演练系统及方法。
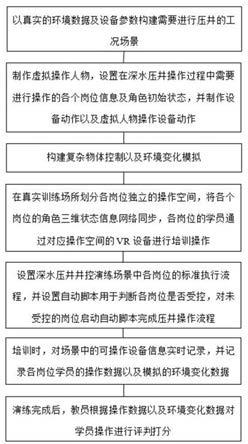
5.本发明的目的是通过以下技术方案来实现的:一种基于vr技术的深水压井井控多岗位协同演练方法,包括以下子步骤:步骤1:以真实的环境数据及设备参数构建需要进行压井的工况场景;步骤2:制作虚拟操作人物,设置在深水压井操作过程中需要进行操作的各个岗位信息及角色初始状态,并制作设备动作以及虚拟人物操作设备动作;步骤3:构建复杂物体控制以及环境变化模拟;步骤4:在真实训练场所划分各岗位独立的操作空间,将各个岗位的角色三维状态信息网络同步,各岗位的学员通过对应操作空间的vr设备进行培训操作;步骤5:设置深水压井井控演练场景中各岗位的标准执行流程,并设置自动脚本用于判断各岗位是否受控,对未受控的岗位启动自动脚本完成压井操作流程;
步骤6:培训时,对场景中的可操作设备信息实时记录,并记录各岗位学员的操作数据以及模拟的环境变化数据;步骤7:演练完成后,教员根据操作数据以及环境变化数据对学员操作进行评判打分。
6.进一步的,所述深水压井井控演练场景具体为:节流管线中摩阻产生回压效应时,采用附加流量法进行深水压井井控操作。
7.进一步的,所述vr设备包括vr头盔和vr手柄,所述头盔内内置显示器、扬声器以及语音识别器;所述vr手柄通过定位的位置信息变化判定学员动作。
8.进一步的,所述步骤1包括以下子步骤:步骤101,采集真实操作空间的环境数据以及设备参数数据;步骤102,静态模型制作:基于3d图形学的方法,利用计算机图形学技术进行虚拟环境的建模和渲染;步骤103,模型贴图以及材质赋予:按照真实物体的光泽与色彩制作模型贴图与材质,运用凹凸贴图、高动态范围贴图以及贴图烘焙技术将贴图应用至场景三维模型中;步骤104,灯光设置:运用3dmax中光源对场景光照进行模拟,通过调整光源数量、大小、照射角度和安装位置,得到模拟真实场景的灯光;步骤105,后期效果调整:将完成的静态模型、人物设备动作、模型贴图材质以及灯光设置整合到一起,然后通过体积特效以及摄像机效果调整,使得在模拟突发工况中的危险情况更加真实。
9.进一步的,所述步骤2包括以下子步骤:步骤201:设置虚拟操作人物,按照工种和职能划分设置操作人物的岗位信息,并初始化角色状态;步骤202:根据静态模型的位置大小,运用动作捕捉技术制作设备动作以及人物操作设备动作;进一步的,所述步骤3中复杂物体控制具体为:步骤301:设置复杂设备关联物体的父子关系;步骤302:设置物体初始状态及运动规则;步骤303:设置与物体运动相关的状态更新;所述环境变化模拟通过多通道流体实现,具体为:步骤311:通过shader着色器负责将输入的mesh网格、输入的贴图和颜色组合作用并输出;步骤312:绘图单元依据输出将图像绘制到屏幕上;步骤313:通过片段着色器完成低层级上shader制作,将输入的贴图或颜色加上对应的shader生成场景所需的material,后将材质赋予合适的renderer渲染器来实现场景渲染。
10.进一步的,所述步骤3中各个岗位的角色三维状态信息网络同步包括:人物动作同步、设备状态同步和演练数据同步。
11.进一步的,一种基于vr技术的深水压井井控多岗位协同演练系统,包括场景模型搭建模块、培训模块、交互控制模块、自动化受控模块以及评分模块;
所述场景模型搭建模块用于搭建深水压井井控演练场景三维模型;所述培训模块用于培训人员选择培训岗位,并通过沉浸式虚拟现实设备完成深水压井井控流程操作;所述交互控制模块用于采集沉浸式虚拟现实设备的操作动作,并根据操作动作操控深水压井井控演练场景三维模型画面;所述自动化受控模块用于判断培训模块中未受控岗位,并启动该岗位虚拟角色对该岗位进行自动操作;所述评分模块用于对学员培训情况进行打分。
12.本发明的有益效果:本发明以提升压井作业人员井控水平为目标,保障海上作业井控安全,充分发挥计算机模拟仿真的优势,基于计算机模拟、三维图形图像立体显示技术、虚拟现实及增强现实等技术,开发一整套井控数字化情景培训演练系统,实现安全、节能、环保的井控培训。
附图说明
13.图1是本发明的方法流程图。
14.图2是本发明的系统功能结构框图。
具体实施方式
15.应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
16.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
17.本实施例中,如图1所示,一种基于vr技术的深水压井井控多岗位协同演练方法,包括以下子步骤:步骤1:以真实的环境数据及设备参数构建需要进行压井的工况场景;步骤2:制作虚拟操作人物,设置在深水压井操作过程中需要进行操作的各个岗位信息及角色初始状态,并制作设备动作以及虚拟人物操作设备动作;步骤3:构建复杂物体控制以及环境变化模拟;步骤4:在真实训练场所划分各岗位独立的操作空间,将各个岗位的角色三维状态信息网络同步,各岗位的学员通过对应操作空间的vr设备进行培训操作;步骤5:设置深水压井井控演练场景中各岗位的标准执行流程,并设置自动脚本用于判断各岗位是否受控,对未受控的岗位启动自动脚本完成压井操作流程;其中,场景中有多个虚拟角色,每台计算机在进行情景演练时只能选择一个角色进行演练。每个角色都有一个单独的c#脚本程序,用于控制虚拟人物的视角,第一人称视角或者第三人称视角,用于接受鼠标、键盘的操作指令控制人物的位置、人物的状态、工具设备的使用情况。人物在接近某一可操作设备时,可操作设备会通过发光指示其特性为可操作设备,引导虚拟任务选择设备,每一类设备包含一个单独的设备使用菜单。每个虚拟角色均配备一个ai脚本,用于单机演练时自动完成未受控角色的操作任务。
18.步骤6:培训时,对场景中的可操作设备信息实时记录,并记录各岗位学员的操作数据以及模拟的环境变化数据;步骤7:演练完成后,教员根据操作数据以及环境变化数据对学员操作进行评判打分。
19.在本实施例中,深水压井井控演练场景具体为:节流管线中摩阻产生回压效应时,采用附加流量法进行深水压井井控操作。
20.附加流量法的原理为:停钻关井后,同时泵入两种流体:一是通过钻杆正常泵入压井液;二是通过压井管线,在海底防喷器组位置泵入低密度流体。这两种流体在防喷器位置混合后由节流管线返出。注入的低密度流体必须具有密度尽可能低、粘度低、能跟钻井液相容及相对于钻井液具有低流变性的特性,以确保混合流体具有低密度和低粘性,从而减小节流管线中钻井液返回的总压降。
21.压井流程类似于传统的司钻法,分两个循环周,第一循环周用原钻井液循环排出井内受污染钻井液;第二循环周循环泵入压井液。
22.第一循环周:关四通下面的防喷器,记录关井立管压力p
sp
;关四通上面的防喷器,从压井管线泵入低密度流体,直到流体伞部注满节流管线,关节流阀;开四通下面的防喷器,记录关井套压pa;开始以压井泵速泵入原始钻井液,并记录初始立管总压力p
ti
;从压井管线开始泵入低密度流体,同时调节节流阀使立管总压力约等于p
ti
;保持钻井液泵入速度和低密度流体泵入速度不变,调节节流阀保持p
ti
不变,直到溢流排出;关井,记录此时的套管压力p
af
(p
sp
≤p
af
),此时节流管汇中充满了钻井液和低密度流体的混合物。
23.第二循环周:开钻井泵,以压井泵速泵入压井液;同时开泵注入低密度流体,调节节流阀保持套压p
af
不变;一旦压井液到达钻头,调节节流阀保持终了立管总压力p
ti
不变;一旦压井液返出到防喷器位置,关闭下层闸板防喷器,用压井液取代压井管线和节流管线中的流体;打开下层防喷器,检查压井情况;用压井液取代隔水管中的钻井液。
24.其中,所述vr设备包括vr头盔和vr手柄,所述头盔内内置显示器、扬声器以及语音识别器;所述vr手柄通过定位的位置信息变化判定学员动作。
25.其中,沉浸式虚拟现实基于头盔式显示器的系统htccosmos,利用头盔显示器把用户的视觉、听觉封闭起来,产生虚拟视觉。用户可通过语音识别器让参与者对系统主机下达操作命令,与此同时,头、手、眼均有相应的头部跟踪器、手部跟踪器、眼睛视向跟踪器的追踪,使系统达到尽可能的交互实时性。沉浸式虚拟现实系统是真实环境替代的理想模型,沉浸式三维显示具有真实感强、交互灵活、反馈实时等特点。
26.为了避免人员操作在真实空间的相互干扰,为人员设定操作物理区域,同时设备线缆悬挂避免缠绕和干扰,使得每位操作人员有独立的操作空间。
27.交互方式可以使用虚拟现实佩戴的手柄与虚拟现实世界交互,通过手势凌空进行交互,可以做抓取,移动,点击等动作。
28.其中,所述步骤1包括以下子步骤:步骤101,采集真实操作空间的环境数据以及设备参数数据;步骤102,静态模型制作:基于3d图形学的方法,利用计算机图形学技术进行虚拟环境的建模和渲染;步骤103,模型贴图以及材质赋予:按照真实物体的光泽与色彩制作模型贴图与材
质,运用凹凸贴图、高动态范围贴图以及贴图烘焙技术将贴图应用至场景三维模型中;步骤104,灯光设置:运用3dmax中光源对场景光照进行模拟,通过调整光源数量、大小、照射角度和安装位置,得到模拟真实场景的灯光;运用3dmax中光源对场景光照进行模拟,通过调整光源数量、大小、照射角度和安装位置,得到模拟真实场景的灯光;通过调整3dmax中光源体的光线,调节光源体修改参数中的decay(衰减)项的数值,使模拟的光线更逼真,在观察方向的前上方设置2~3个亮度较小的全光源,模拟自然环境中因为存在大量由周围物体折射、反射、漫射而来的各种各样的环境光;通过attenuation(衰减)模拟在真实世界中,光线由于距离的增大而产生的强度递减。
29.步骤105,后期效果调整:将完成的静态模型、人物设备动作、模型贴图材质以及灯光设置整合到一起,然后通过体积特效以及摄像机效果调整,使得在模拟突发工况中的危险情况更加真实。
30.其中,所述步骤2包括以下子步骤:步骤201:设置虚拟操作人物,按照工种和职能划分设置操作人物的岗位信息,并初始化角色状态;步骤202:根据静态模型的位置大小,运用动作捕捉技术制作设备动作以及人物操作设备动作;采用动作捕捉技术涉及尺寸测量、物理空间里物体的定位及方位测定等方面可以由计算机直接理解处理的数据。在运动物体的关键部位设置跟踪器,由动作捕捉系统捕捉跟踪器位置,再经过计算机处理后向用户提供可以在动画制作中应用的数据。当数据被计算机识别后,设计人员在计算机产生的镜头中调整、控制运动的物体。运动捕捉技术极大地提高动画制作的水平和动画制作的效率,而且使动画制作过程更为直观,效果更为生动。
31.其中,所述步骤3中复杂物体控制具体为:步骤301:设置复杂设备关联物体的父子关系;步骤302:设置物体初始状态及运动规则;步骤303:设置与物体运动相关的状态更新;复杂设备在使用前,根据设备的工作原理,充分考虑其联动关系及关联关系,设置合理有效,并且方便控制的父子关系。父子关系是一种遵循oop的继承关系;父物体具有面向对象中基类的概念,功能级别更高。对父物体进行操作后,相关联的子物体也会随之进行相同的变化;而作为子物体,除了拥有与父物体相同的运动以外,还可以对其进行其他的运动控制。父子关系可以有多个层级,子物体可以被单独控制。通过该方法,可以实现关联物体的高效控制。遵循机械设备运动的原理和过程,使复杂物体的控制更真实。
32.设置物体初始状态及运动规则;当程序开始运行,三维场景中的所有三维对象都将按照主控程序的要求初始化为井场的作业状态。由于系统遵循无定序,这就要求所有三维对象可能处于的状态都将能够被模拟。因此,需要对复杂物体的初始状态和运动规则进行充分的总结和归纳,以保证在程序运行的过程中与主控要求的状态一致,并能正确高效的把图形程序中各种设备的状态和现场情况以数据流的方式回传给主控程序。
33.设置与物体运动相关的状态更新;
模拟真实情况的演练流程无定序操作要求系统满足有穷状态机的所有状态描述,这就要求图形程序运行的过程中需要时刻进行状态更新(例如防喷器状态、油管与防喷器的碰撞关系等)。在复杂物体运动时,需要进行碰撞检测、运动跟踪、状态判定、数据回传等工作,既满足三维物体的动作展示,又实时传送相关的状态数据,以保证与主控信息的一致性;系统中涉及到多种流体在不规则空间内的流动或者压力变化过程的模拟,包括:防喷器内的液压油、管壁内的压力大小变化等。对于原理性流体和压力变化在设备内部结构的变化展示,采用多通道shader实现,所述多通道流体实现具体为:环境变化模拟通过多通道流体实现,具体为:步骤311:通过shader着色器负责将输入的mesh网格、输入的贴图和颜色组合作用并输出;步骤312:绘图单元依据输出将图像绘制到屏幕上;步骤313:通过片段着色器完成低层级上shader制作,将输入的贴图或颜色加上对应的shader生成场景所需的material,后将材质赋予合适的renderer渲染器来实现场景渲染。
34.其中,所述步骤3中各个岗位的角色三维状态信息网络同步包括:人物动作同步、设备状态同步和演练数据同步。
35.人物动作同步主要分两种模式:第一种是控制人物移动过程中的人物位置,以及人物动画机的同步。在人物运动过程中,人物物体上挂载的netsync脚本,2台不同电脑上都挂载同一脚本,不同的地方就是一个是发送端一个是接收端,通过发送端不停的发送控制人物的位置、角度、以及人物上的动画机,接收端收到数据后同步电脑上该人物位置、角度、以及人物上的动画机从而达到同一人物在不同电脑上的动作同步。第二种需要同步的情况则是人物需要协同去操作卡瓦、上卸防喷工具的时候,当需要操作这类设备的时候,需要同步两个人的就位状态,当两个人同时到位以后,2台电脑才会触发各自的动作,从而实现人物动作的同步进行。
36.设备状态的同步分为两种情况:第一种是同步防喷器、节流控制箱,以及司钻座椅上的数据;另一种则是同步阀门状态。第一种情况的同步是通过将设备操作的模拟硬件数据上传给服务器,服务器经过运算,再实时的下发给每台电脑,从而实现设备状态的同步。第二种情况是当使用者操作阀门,本地计算机判断当前阀门状态,根据当前阀门状态发送操作请求给服务器,服务器判断能够操作后,将操作指令分发给每台客户机,客户机分别执行动作后,修改各自状态。
37.演练数据同步主要应用于实时井况、各种管汇压力、顶驱运行数据等的同步,这类数据的同步主要是通过服务器的运算,实时的将数据分发给每台客户端。
38.在本实施例中,如图2所示,一种基于vr技术的深水压井井控多岗位协同演练系统,包括场景模型搭建模块、培训模块、交互控制模块、自动化受控模块以及评分模块;所述场景模型搭建模块用于搭建深水压井井控演练场景三维模型;所述培训模块用于培训人员选择培训岗位,并通过沉浸式虚拟现实设备完成深水压井井控流程操作;所述交互控制模块用于采集沉浸式虚拟现实设备的操作动作,并根据操作动作操
控深水压井井控演练场景三维模型画面;所述自动化受控模块用于判断培训模块中未受控岗位,并启动该岗位虚拟角色对该岗位进行自动操作;所述评分模块用于对学员培训情况进行打分。
39.以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护的范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1