致动装置及其操作方法与投影机与流程
1.本发明关于一种致动装置及其操作方法与投影机,且特别是有关于一种可调整光学元件的偏转角度的致动装置及其操作方法与投影机。
背景技术:
2.一般来说,致动器是设置于投影机内,而影像光束会通过致动器上的玻璃。当致动器的驱动元件作动时,框体的轴部会扭转,而使得框体所承载的玻璃产生快速来回偏摆,而将影像光束通过玻璃而折射至另一位置,借此达到增加投影机投射影像的解析度的效果。常用的一个方向(即2way)致动器通常为1轴设计,光路轨迹为对角移动;而,二个方向(即4way)致动器通常为2轴设计,光路轨迹为四角移动。在致动器设计时仅能选择一种进行设计,当致动器结构设计完成后即无法变更。若需要变更设计,则只能需重新设计。也就是说,目前的致动器结构无法同时并存共用一个方向(即2way)以及二个方向(即4way),使用者也无法自行切换。
[0003]“背景技术”段落只是用来帮助了解本
技术实现要素:
,因此在“背景技术”段落所公开的内容可能包含一些没有构成本领域技术人员所知道的现有技术。在“背景技术”段落所公开的内容,不代表该内容或者本发明一个或多个实施例所要解决的问题,在本发明申请前已被本领域技术人员所知晓或认知。
发明内容
[0004]
本发明提供一种致动装置,可切换不同致动模式(即第一模式(如2way)或第二模式(如4way)),可节省开发成本及产线换线成本。
[0005]
本发明提供一种致动装置的控制方法,用以控制上述的致动装置。
[0006]
本发明提供一种投影机,包括上述的致动装置,可改变投影画面的解析度与影像的锐利度。
[0007]
本发明的其他目的和优点可以从本发明所公开的技术特征中得到进一步的了解。
[0008]
为达到上述之一或部分或全部目的或是其他目的,本发明的一实施例提出一种致动装置,包括框体、座体、第一驱动组件、第二驱动组件及光学元件。框体包括第一框部及第二框部。座体环绕框体。第一驱动组件设置于座体与第一框部之间。第一框部借由第一驱动组件而相对于座体摆动。第二驱动组件设置于座体与第二框部之间。第二框部借由第二驱动组件而相对于座体摆动。光学元件配置于框体上且位于第二框部内。当致动装置设定为第一模式时,第一驱动组件与第二驱动组件的相位差为0度,框体以光学元件的对角线为转动轴,而使光学元件相对于座体呈现第一致动模式。或者,当致动装置设定为第二模式时,第一驱动组件与第二驱动组件的相位差为90度,框体以光学元件的两中心线为转动轴,而使光学元件相对于座体呈现第二致动模式。
[0009]
为达到上述之一或部分或全部目的或是其他目的,本发明的一实施例提出一种致动装置的控制方法,其包括以下步骤。透过使用者界面,接收第一模式信号或第二模式信
号。当使用者界面接收到第一模式信号时,透过控制电路控制致动装置的多个驱动组件中相邻两者的相位差为0度,使光学元件呈现第一致动模式。当使用者界面接收到第二模式信号时,透过控制电路控制致动装置的驱动组件中相邻两者的相位差为90度,使光学元件呈现第二致动模式。
[0010]
为达到上述之一或部分或全部目的或是其他目的,本发明的一实施例提出一种投影机,包括照明系统、光阀、投影镜头、致动装置。照明系统用于提供照明光束。光阀用于将照明光束转换为影像光束。投影镜头用于将影像光束投射至投影机外。致动装置配置于光阀与投影镜头之间。致动装置,包括框体、座体、第一驱动组件、第二驱动组件及光学元件。框体包括第一框部及第二框部。座体环绕框体。第一驱动组件设置于座体与第一框部之间。第一框部借由第一驱动组件而相对于座体摆动。第二驱动组件设置于座体与第二框部之间。第二框部借由第二驱动组件而相对于座体摆动。光学元件配置于框体上且位于第二框部内。当致动装置设定为第一模式时,第一驱动组件与第二驱动组件的相位差为0度,框体以光学元件的对角线为转动轴,而使光学元件相对于座体呈现第一致动模式。或者,当致动装置设定为第二模式时,第一驱动组件与第二驱动组件的相位差为90度,框体以光学元件的两中心线为转动轴,而使光学元件相对于座体呈现第二致动模式。
[0011]
基于上述,本发明的实施例至少具有以下其中一个优点或功效。在本发明的致动装置的设计中,透过第一驱动组件与第二驱动组件之间相位差,可改变光学元件相对于座体的致动模式。也就是说,本发明的致动装置可透过驱动组件之间的相位差来切换不同致动模式,借此可节省致动装置的开发成本与产线换线成本。此外,采用本发明的致动装置的投影机,可改变投影画面的解析度与影像的锐利度。因此,使用者可根据对于显示画面的需求(如锐利度或解析度等),选择所需的致动模式,进而达到投影画面所需的显示解析度。
附图说明
[0012]
图1是依照本发明的一实施例的一种投影机的示意图。
[0013]
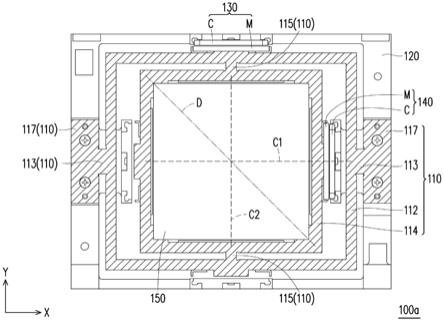
图2a是图1的致动装置接收影像光束的方向的前视示意图。
[0014]
图2b及图2c分别是图2a的致动装置在第一模式下,驱动组件的相位差与图像框的示意图及光路轨迹示意图。
[0015]
图2d及图2e分别是图2a的致动装置在第二模式下,驱动组件的相位差与图像框的示意图及光路轨迹示意图。
[0016]
图3a是依照本发明的另一实施例的一种致动装置接收影像光束的方向的前视示意图。
[0017]
图3b是图3a的致动装置在第一模式下,驱动组件的相位差与图像框的示意图。
[0018]
图3c是图3a的致动装置在第二模式下,驱动组件的相位差与图像框的示意图。
[0019]
图4是依照本发明的一实施例的一种致动装置的控制方法的流程图。
[0020]
附图标记列表
[0021]
10:投影机
[0022]
12:照明系统
[0023]
14:光阀
[0024]
16:投影镜头
[0025]
100a、100b:致动装置
[0026]
110:框体
[0027]
112:第一框部
[0028]
113:第一轴部
[0029]
114:第二框部
[0030]
115:第二轴部
[0031]
117:固定部
[0032]
120:座体
[0033]
130:第一驱动组件
[0034]
140:第二驱动组件
[0035]
150:光学元件
[0036]
160:第三驱动组件
[0037]
170:第四驱动组件
[0038]
c:线圈
[0039]
c1、c2:中心线
[0040]
d:对角线
[0041]
l1:照明光束
[0042]
l2:影像光束
[0043]
m:磁铁
[0044]
p1:第一模式
[0045]
p2:第二模式
[0046]
s10、s22、s24:步骤。
具体实施方式
[0047]
有关本发明的前述及其他技术内容、特点与功效,在以下配合参考附图的一优选实施例的详细说明中,将可清楚的呈现。以下实施例中所提到的方向用语,例如:上、下、左、右、前或后等,仅是参考附图的方向。因此,使用的方向用语是用来说明并非用来限制本发明。
[0048]
图1是依照本发明的一实施例的一种投影机的示意图。请参考图1,在本实施例中,投影机10包括照明系统12、光阀14、投影镜头16以及致动装置100a。照明系统12用于提供照明光束l1。照明系统12还包括光源例如灯泡、发光二极管(led)或激光光源(laser light source)。光阀14用于将照明光束l1转换为影像光束l2。光阀14例如是反射式或透射式的空间光调制器,以反射式空间光调制器为例,反射式的硅基液晶(liquid crystal on silicon,lcos)或者数字微镜组件(digital micro-mirror device,dmd)等;透射式的空间光调制器,例如透光液晶面板(transparent liquid crystal panel)。投影镜头16用于将影像光束l2投射至投影机10外,显示于屏幕或墙面上(未绘示)。举例而言,投影镜头16例如包括具有屈光度的一个或多个光学镜片的组合,例如包括双凹透镜、双凸透镜、凹凸透镜、凸凹透镜、平凸透镜以及平凹透镜等非平面镜片的各种组合。于一实施例中,投影镜头16也可以包括平面光学镜片。本发明对投影镜头130的型态及其种类并不加以限制。致动装置
100a配置于光阀14与投影镜头16之间。
[0049]
图2a是图1的致动装置接收影像光束的方向的前视示意图。图2b及图2c分别是图2a的致动装置在第一模式下,驱动组件的相位差与图像框的示意图及光路轨迹示意图。图2d及图2e分别是图2a的致动装置在第二模式下,驱动组件的相位差与图像框的示意图及光路轨迹示意图。
[0050]
请先参考图2a,在本实施例中,致动装置100a包括框体110、座体120、第一驱动组件130、第二驱动组件140及光学元件150。框体110包括第一框部112及第二框部114。座体120环绕框体110。第一驱动组件130设置于座体120与第一框部112之间,其中第一框部112借由第一驱动组件130的作动而相对于座体120摆动。第二驱动组件140设置于座体120与第二框部114之间,其中第二框部114借由第二驱动组件140的作动而相对于座体120摆动。光学元件150配置于框体110上且位于第二框部114内。
[0051]
详细来说,本实施例的框体110还包括至少一第一轴部(示意地绘示两个第一轴部113)、至少一第二轴部(示意地绘示两个第二轴部115)以及至少一固定部(示意地绘示两个固定部117)。固定部117固定于座体120上,其中第一框部112借由第一轴部113连接至固定部117,而第二框部114借由第二轴部115连接至第一框部112。较佳地,第一框部112、第二框部114、第一轴部113、第二轴部115、固定部117例如为一体成型,而框体110的例如是金属。此处,第一轴部113的延伸方向垂直于第二轴部115的延伸方向,因此致动装置100a可视为是双轴的致动器。
[0052]
再者,本实施例的致动装置100a于每一轴向上有一个驱动组件,即在x轴向有第二驱动组件140,而在y轴向有第一驱动组件130。第一驱动组件130与第二驱动组件140可各自独立控制,其中第一驱动组件130与第二驱动组件140皆分别例如是音圈马达或压电材料。举例来说,第一驱动组件130与第二驱动组件140皆例如是音圈马达,其中音圈马达包括一线圈c与一磁铁m。线圈c与磁铁m其中的一个固定于框体110上,而线圈c与磁铁m其中的另一个固定于座体120上。此处,线圈c固定于座体120上,而磁铁固定于框体110上,借由给与线圈c交流(ac)信号,可使线圈c与磁铁m相对彼此移动,从而带动第一轴部113与第二轴部115的变形与扭转,因此可带动光学元件150可相对座体120振动或摆动。在其他未绘示的实施例中,驱动元件也可以为压电材料,透过施给压电材料电压使其变形,进而带动光学元件150可相对座体120振动或摆动。
[0053]
请同时参考图2a、图2b及图2c,当致动装置100a设定为第一模式p1时,第一驱动组件130与第二驱动组件140的相位差为0度,框体110以光学元件150的对角线d为转动轴,而使光学元件150相对于座体120呈现第一致动模式。此处,第一致动模式具体地为对角线摆动,而像素移动轨迹呈现为对角移动(即像素对角移动)。换言之,当致动装置100a为一个方向(即2way)偏摆时,在不同轴向上的第一驱动组件130与第二驱动组件140的相位差为0度。
[0054]
请同时参考图2a、图2d及图2e,当致动装置100a设定为第二模式p2时,第一驱动组件130与第二驱动组件140的相位差为90度,框体110以光学元件150的两中心线c1、c2为转动轴,而使光学元件150相对于座体120呈现第二致动模式。此处,第二致动模式具体地为正交摆动,而像素移动轨迹呈现为四角移动(即1/2像素正交移动)。换言之,当致动装置100a为两个方向(如4way)偏摆时,在不同轴向上的第一驱动组件130与第二驱动组件140的相位
差为90度。
[0055]
简言之,借由控制不同轴向上的第一驱动组件130与第二驱动组件140之间相位差,可改变光学元件150相对于座体120的致动模式,进而改变光束通过光学元件150的轨迹,而可切换2way或4way振动或摆动。也就是说,本实施例的致动装置100a可透过驱动组件之间的相位差来切换不同致动模式,借此可节省致动装置的开发成本与产线换线成本。此外,采用本实施例的致动装置100a的投影机10,可改变投影画面的解析度与影像的锐利度。因此,使用者可根据对于显示画面的需求(如锐利度或解析度等),选择所需的致动模式,进而达到投影画面所需的显示解析度。
[0056]
在此必须说明的是,下述实施例沿用前述实施例的元件标号与部分内容,其中采用相同的标号来表示相同或近似的元件,并且省略了相同技术内容的说明。关于省略部分的说明可参考前述实施例,下述实施例不再重复赘述。
[0057]
图3a是依照本发明的另一实施例的一种致动装置接收影像光束的方向的前视示意图。图3b是图3a的致动装置在第一模式下,驱动组件的相位差与图像框的示意图。图3c是图3a的致动装置在第二模式下,驱动组件的相位差与图像框的示意图。请先同时参考图2a以及图3a,本实施例的致动装置100b与图2a的致动装置100a相似,两者的差异在于:本实施例的致动装置100b更包括第三驱动组件160以及第四驱动组件170。第三驱动组件160对应第一驱动组件130设置,且设置于座体120与第一框部112之间。第一框部112借由第一驱动组件130以及第三驱动组件160而相对于座体120摆动。第四驱动组件170对应第二驱动组件140设置,且设置于座体120与第二框部114之间。第二框部114借由第二驱动组件140以及第四驱动组件170而相对于座体120摆动。也就是说,在x轴向与y轴向上包括四个驱动组件,意即每一个轴向上有两个躯动组件。意即,x轴上有第一驱动组件130与第三驱动组件160,而y轴上有第二驱动组件140与第四驱动组件170。较佳地,第一驱动组件130与第三驱动组件160的相位差为180度,而第二驱动组件140与第四驱动组件170的相位差为180度。
[0058]
请同时参考图3a及图3b,当第三驱动组件160与第四驱动组件170的相位差为0度,且第一驱动组件130与第四驱动组件140的相位差为180度时,框体110以光学元件150的对角线d为转动轴,而使光学元件150相对于座体120呈现第一致动模式。此处,第一致动模式具体地为对角线摆动。换言之,当致动装置100b为2way偏摆时,在不同轴向上且相邻的驱动组件140之间的相位差为0度及180度。
[0059]
请同时参考图3a及图3c,当第三驱动组件160与第四驱动组件170的相位差为90度,且第一驱动组件130与第四驱动组件170的相位差为270度时,框体110以光学元件150的两中心线c1、c2为转动轴,使光学元件150相对于座体120呈现第二致动模式。此处,第二致动模式具体地为正交摆动。换言之,当致动装置100b为4way偏摆时,在不同轴向上且相邻的驱动组件之间的相位差为90度及270度。简言之,不论是2way或4way偏摆,在同一轴向上的驱动元件,两者之相位差皆为180度。
[0060]
图4是依照本发明的一实施例的一种致动装置的控制方法的流程图。请先参考图2a以及图4,首先,步骤s10,透过使用者界面,接收第一模式信号或第二模式信号。若进入步骤s22,即当使用者界面接收到第一模式信号时,透过控制电路控制致动装置100a的多个驱动组件(即第一驱动组件130与第二驱动组件140)中相邻两者的相位差为0度,使光学元件150呈现第一致动模式。若进入步骤s24,即当使用者界面接收到第二模式信号时,透过控制
电路控制致动装置100a(或致动装置100b)的驱动组件(即第一驱动组件130与第二驱动组件140)中相邻两者的相位差为90度,使光学元件150呈现第二致动模式。
[0061]
若以图3a的致动装置100b作为举例说明,则当使用者界面接收到第一模式信号时,透过控制电路控制第一驱动组件130与第三驱动组件160的相位差为180度,第二驱动组件140与第四驱动组件170的相位差为180度,第三驱动组件160与第四驱动组件170的相位差为0度,且第一驱动组件130与第四驱动组件170的相位差为180度,使光学元件150呈现第一致动模式。或者是,当使用者界面接收到第二模式信号时,透过控制电路控制第三驱动组件160与第四驱动组件170的相位差为90度,第一驱动组件130与第四驱动组件170的相位差为270度,使光学元件150呈现第二致动模式。此处,第一致动模式为对角线摆动,而第二致动模式为正交摆动。
[0062]
对使用者来说,使用者可透过使用者界面选择不同的解析度。也就是说,致动装置100a、100b可依使用者选择进行一个方向振动或两个方向振动或不作动,而有不同的解析度。当使用者选择致动装置100a、100b进行两个方向(即4way)振动时,可使投影画面解析度较高,因其在一个图像框内,像素移动4次,可同时参考图2d、图2e以及图3c。但是,也因为影像移动时间的占比较高,所以影像的锐利度较一个方向振动差。当使用者选择致动装置100a、100b进行一个方向(即2way)振动时,相对两个方向振动来说,画面解析度较差,因其在一个图像框内,像素仅移动2次,可同时参考图2b、图2c以及图3b。但是,因为影像移动时间的占比较低,所以对于影像的锐利度的影响较二个方向(即4way)的振动小。若致动装置100a、100b不作动,即不使用致动装置100a、100b,则为原始dmd解析度,并无增加解析度,但像素没有移动,所以影像的锐利度为最佳。
[0063]
简言之,在致动装置100a、100b结构相同并可共用情况下,仅透过控制各驱动元件信号的不同,就可切换不同致动模式(2way&4way),可节省致动装置100a、100b的开发成本与产线换线成本。使用者可根据对于投影画面的需求(如锐利度或解析度),选择不同的显示解析度。
[0064]
综上所述,本发明的实施例至少具有以下其中一个优点或功效。在本发明的致动装置的设计中,透过第一驱动组件与第二驱动组件之间相位差,可改变光学元件相对于座体的致动模式。也就是说,本发明的致动装置可透过驱动组件之间的相位差来切换不同致动模式,借此可节省致动装置的开发成本与产线换线成本。此外,采用本发明的致动装置的投影机,可改变投影画面的解析度与影像的锐利度。因此,使用者可根据对于显示画面的需求(如锐利度或解析度等),选择所需的致动模式,进而达到投影画面所需的显示解析度。
[0065]
以上所述,仅为本发明的优选实施例而已,不能以此限定本发明实施的范围,即凡是依照本发明权利要求书及说明书内容所作的简单的等效变化与修饰,皆仍属本发明专利涵盖的范围内。另外本发明的任一实施例或权利要求不须达到本发明所公开的全部目的或优点或特点。此外,说明书摘要和发明名称仅是用来辅助专利文件检索,并非用来限制本发明的权利范围。此外,本说明书或权利要求书中提及的“第一”、“第二”等用语仅用以命名元件(element)的名称或区别不同实施例或范围,而并非用来限制元件数量上的上限或下限。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1