一种中心支撑的碳纤维多功能遥感相机
1.本发明涉及空间遥感技术领域,具体涉及一种中心支撑的碳纤维多功能遥感相机。
背景技术:
2.碳纤维第一反射镜的比刚度高,热性能和动力学性能优良。因此,可以制成蜂窝型的中空结构,也可以制成薄壁型结构,既可以满足地面需求,也可以满足空间光学遥感相机的轻量化要求。近年来,碳纤维第一反射镜在国际上的光学遥感领域普遍应用。
3.现有技术中,碳纤维第一反射镜大多都是薄壁型结构。为了保证相机整体的支撑刚度和稳定性,主镜和第二反射镜之间采用的支撑方式主要是三棱锥形支架形式。三棱锥形支架的顶端和底面分别连接第二反射镜和相机的基板。为了保证支撑刚度,三棱锥形支架的杆件不能做的很长,因此,基板的径向尺寸都较大。这无疑会增加相机的整机重量。因此,为了实现超轻量化设计,需要设计新的支撑方式。
技术实现要素:
4.有鉴于此,本发明提供了一种中心支撑的碳纤维多功能遥感相机,能够实现遥感相机的超轻量化、多功能设计。
5.本发明的技术方案为:一种中心支撑的碳纤维多功能遥感相机,包括:可见光相机、碳纤维承力塔组件和红外相机,可见光相机和红外相机通过碳纤维承力塔组件同轴连接;其中,所述可见光相机包括:碳纤维第三反射镜组件、碳纤维第四反射镜组件和可见光焦面组件;所述红外相机包括:透镜组件和红外焦面组件,且可见光相机与红外相机共用碳纤维第一反射镜和碳纤维第二反射镜;
6.所述碳纤维承力塔组件的一端和可见光焦面组件分别与碳纤维第一反射镜连接,碳纤维第二反射镜和透镜组件分别与碳纤维承力塔组件的另一端连接,且透镜组件同时与红外焦面组件连接;碳纤维第三反射镜组件与碳纤维承力塔组件连接;碳纤维第四反射镜组件与碳纤维承力塔组件连接。
7.优选地,所述碳纤维承力塔组件包括:竖直支架、上端碳纤圆环、主承力结构和下端碳纤圆环;上端碳纤圆环、主承力结构和下端碳纤圆环从上到下依次同轴分布;其中,主承力结构作为碳纤维承力塔组件的中间层,其为圆台状筒体结构,其周向均匀设置三个竖直支架,每个竖直支架为长条状薄片结构,且长度方向与主承力结构的轴向平行,宽度方向沿主承力结构的径向,厚度方向沿主承力结构的周向,三个竖直支架的上端和下端分别与上端碳纤圆环和下端碳纤圆环连接,上端碳纤圆环上留有承力塔二镜接口,下端碳纤圆环上留有承力塔基板接口,主承力结构的小端留有承力塔四镜接口;其中,将竖直支架的上端沿着主承力结构的径向加宽,下端沿着主承力结构的周向加厚。
8.优选地,所述碳纤维第四反射镜组件包括:碳纤维第四反射镜和第四反射镜柔性支撑;碳纤维第四反射镜为圆盘形结构,其中心设有通光孔;第四反射镜柔性支撑安装在碳
纤维第四反射镜的轴向一端;
9.其中,所述碳纤维第四反射镜包括:第四反射镜面板、轻量化斜筋ⅳ和芯轴ⅲ;第四反射镜面板为圆环形面板,其同轴套装在芯轴ⅲ上,且第四反射镜面板和芯轴ⅲ之间沿芯轴ⅲ的周向设置三个以上轻量化斜筋ⅳ,每个轻量化斜筋ⅳ为直角梯形片状结构,其高度所在方向的一端与芯轴ⅲ的外圆周面相连,长底边与碳纤维第四反射镜相连,高度所在方向一端的相对端与外圆周ⅲ相连;在芯轴ⅲ的外圆周面上留有第四反射镜接口;
10.所述第四反射镜柔性支撑采用圆环形结构,在第四反射镜柔性支撑的端面上通过线切割的方式开设有两圈环形槽或正多边形槽,每圈环形槽沿周向均匀分为三段以上弧形槽,每圈正多边形槽沿周向均匀分为三段以上条形槽,内圈环形槽或正多边形槽中的相邻两段之间通过内环的刚性连杆ⅱ连接,外圈环形槽或正多边形槽中的相邻两段之间通过外环的刚性连杆ⅱ连接,且内外环的刚性连杆ⅱ错位设置,内外两圈环形槽或正多边形槽之间形成六段柔性连杆ⅱ;第四反射镜柔性支撑的圆环内壁面与碳纤维第四反射镜的芯轴ⅲ连接,圆环外壁面上沿周向留有一个以上外部接口ⅱ,所有外部接口ⅱ与承力塔四镜接口连接;第四反射镜柔性支撑的内圆周面上设有反射镜接口ⅱ,反射镜接口ⅱ和碳纤维第四反射镜的第四反射镜接口连接,内环的刚性连杆ⅱ和外环的刚性连杆ⅱ之间通过柔性连杆ⅱ连接。
11.优选地,所述碳纤维第二反射镜为圆柱形结构,其轴向一端所在的端面为光线入射面,该表面上镀半反射、半透射膜,作为半反半透面,另一端所在的端面为透射面;其中,碳纤维第二反射镜通过压圈或包边的形式固定在镜座内。
12.优选地,所述碳纤维第一反射镜包括:主反射镜和基板;主反射镜为圆环结构,其外圆周ⅰ和内圆周之间同轴设有翻边,主反射镜和基板采用一体式同轴设计,二者的中心轴为芯轴;翻边和外圆周ⅰ之间设置轻量化斜筋ⅰ,轻量化斜筋ⅰ采用矩形或三角形或者扇形;
13.基板为正多边形或圆形框架结构,其周向开有基板轻量化槽,基板与芯轴之间交错设有轻量化斜筋ⅱ,并在轻量化斜筋ⅱ的交汇处留有碳纤维承力塔组件的接口和可见光焦面组件的接口;在基板的侧面或下端面设计基板接口。
14.优选地,所述碳纤维第三反射镜组件包括:碳纤维第三反射镜、第三反射镜柔性支撑和第三反射镜轻量化支撑;碳纤维第三反射镜为圆盘形结构,其中心设有通光孔,第三反射镜轻量化支撑采用圆筒形结构形式,碳纤维第三反射镜通过第三反射镜柔性支撑安装在第三反射镜轻量化支撑的轴向一端,第三反射镜轻量化支撑的轴向另一端支撑在三角形底座上;
15.其中,所述碳纤维第三反射镜包括:第三反射镜面板、轻量化斜筋ⅲ和芯轴ⅱ,第三反射镜面板为圆环形面板,其同轴套装在芯轴ⅱ上,且第三反射镜面板和芯轴ⅱ之间沿芯轴ⅱ的周向设置三个以上轻量化斜筋ⅲ,每个轻量化斜筋ⅲ为直角梯形片状结构,其高度所在方向的一端与芯轴ⅱ的外圆周面相连,长底边与第三反射镜面板相连,高度所在方向一端的相对端与外圆周ⅱ相连;在芯轴ⅱ的外圆周面上留有第三反射镜接口;
16.所述第三反射镜柔性支撑采用圆环形结构,在第三反射镜柔性支撑的端面上通过线切割的方式开设有两圈环形槽或正多边形槽,每圈环形槽沿周向均匀分为三段以上弧形槽,每圈正多边形槽沿周向均匀分为三段以上条形槽,内圈环形槽或正多边形槽中的相邻两段之间通过内环的刚性连杆ⅰ连接,外圈环形槽或正多边形槽中的相邻两段之间通过外
环的刚性连杆ⅰ连接,且内外环的刚性连杆ⅰ错位设置,内外两圈环形槽或正多边形槽之间形成六段柔性连杆ⅰ;第三反射镜柔性支撑的圆环内壁面与碳纤维第三反射镜的芯轴ⅱ连接,圆环外壁面上沿周向留有一个以上外部接口ⅰ,所有外部接口ⅰ与上端接口ⅰ连接;第三反射镜柔性支撑的内圆周面上设有反射镜接口ⅰ,反射镜接口ⅰ和碳纤维第三反射镜的第三反射镜接口连接,内环的刚性连杆ⅰ和外环的刚性连杆ⅰ之间通过柔性连杆ⅰ连接;
17.所述第三反射镜轻量化支撑分为上中下三层,上下两端分别是上端接口ⅰ和下端接口ⅰ;上端接口ⅰ连接第三反射镜柔性支撑,下端接口ⅰ设置在三角形底座上,其为外界接口;中间层是承力结构,由中间薄壁圆筒和沿周向均匀设置在薄壁圆筒周围的三组支撑斜筋组成;每两个支撑斜筋之间,在薄壁圆筒上开有“米”字形轻量化孔ⅱ,薄壁圆筒的圆周面上沿周向共开设三组轻量化孔ⅱ。
18.优选地,所述可见光焦面组件包括:可见光焦面筒和可见光焦面电箱;可见光焦面筒为圆锥状筒体,可见光焦面电箱设置在可见光焦面筒的小端;其中,所述可见光焦面筒包括:承力筒和设置在承力筒轴向两端的上端接口ⅱ和下端接口ⅱ;所述可见光焦面电箱包括:可见光焦面、电箱壳体ⅰ、电箱后盖和棱镜;电箱壳体ⅰ为长方体框架结构,其相对的两端分别设有圆形的电箱接口和电箱后盖,电箱接口用于将电箱壳体ⅰ与可见光焦面筒的小端连接;电箱壳体ⅰ内部设有可见光焦面,电箱壳体ⅰ的侧面设有数据接口和棱镜。
19.优选地,所述透镜组件包括:镜筒、镜座和透镜;所述镜筒为阶梯轴状多段筒体,且直径从一端向另一端逐渐增大,相邻筒体之间通过圆台状筒体同轴连接,镜筒内壁面上沿轴向设置两个以上镜座,每个镜座内沿镜筒的圆周方向设置一个环形凹槽,每个镜座内设置一个透镜;相邻镜座之间的轴向间隔可调,镜筒的大端通过该端的圆周法兰接口与碳纤维承力塔组件连接,小端通过该端的圆周法兰接口与红外焦面组件连接;通过垫片调节镜筒和红外焦面组件之间的相对位置。
20.优选地,所述红外焦面组件包括:红外焦面、电路板ⅱ和电箱壳体ⅱ;所述红外焦面由光学系统给定,安装探测器时保证其感光面和红外焦面对准,探测器后面依次设置电路板ⅱ和电源;电箱壳体ⅱ的上留有基准棱镜的安装接口和红外焦面接口,红外焦面接口用于连接红外焦面组件与透镜组件。
21.有益效果:
22.1、本发明的中心支撑的碳纤维多功能遥感相机,采用碳纤维承力塔组件将可见光相机和红外相机同轴连接的一体式设计,能够同时实现可见光和红外谱段的照相功能,降低了整机重量,实现了超轻型轻量化设计,且支撑的碳纤维反射镜重量低、稳定性好、面形精度高,在空间遥感技术领域具有较好的应用前景。
23.2、本发明中的可见光相机和红外相机共用碳纤维第一反射镜和碳纤维第二反射镜,能够有效将可见光相机和红外相机紧密连接的同时,可以有效简化结构,降低了整机重量。
24.3、本发明中碳钎维承力塔组件的具体设计,能够将可见光相机和红外相机可靠连接,降低支撑框架的整体重量,提升了系统动力学性能,保证了可见光相机和红外相机的整体支撑刚度和支撑面形;同时,采用中心支撑碳纤维第二反射镜,减小了支撑框架和承力基板的整体尺寸,节省了空间,且大大降低了整机重量。
附图说明
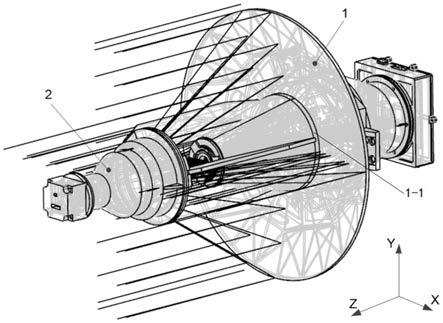
25.图1是本发明遥感相机的结构示意图;
26.图2是图1中可见光相机的半剖示意图;
27.图3是图1中红外相机的半剖示意图;
28.图4是图1、2、3中碳纤维承力塔组件的结构示意图;
29.图5是图2、3中第二反射镜的结构示意图;
30.图6是图2、3中碳纤维第一反射镜的结构示意图;
31.图7是图2中碳纤维第三反射镜组件的结构示意图;
32.图8是图7中碳纤维第三反射镜的结构示意图;
33.图9是图7中第三反射镜柔性支撑的结构示意图;
34.图10是图7中第三反射镜轻量化支撑的结构示意图;
35.图11是图2中碳纤维第四反射镜组件的结构示意图;
36.图12是图11中碳纤维第四反射镜的结构示意图;
37.图13是图11中第四反射镜柔性支撑的结构示意图;
38.图14是图2中可见光相机焦面组件的结构示意图;
39.图15是图14中可见光相机焦面筒的结构示意图;
40.图16是图14中可见光相机焦面组件的结构示意图;
41.图17是图3中红外相机透镜组件的结构示意图;
42.图18是图3中红外相机焦面组件的结构示意图。
43.其中,1、可见光相机,2、红外相机;
[0044]1‑
1、碳纤维承力塔组件,1
‑
2、碳纤维第二反射镜,1
‑
3、碳纤维第一反射镜,1
‑
4、碳纤维第三反射镜组件,1
‑
5、碳纤维第四反射镜组件,1
‑
6、可见光焦面组件;
[0045]2‑
1、透镜组件,2
‑
2、红外焦面组件;
[0046]1‑1‑
1、竖直支架,1
‑1‑
2、承力塔二镜接口,1
‑1‑
3、承力塔四镜接口,1
‑1‑
4、承力塔基板接口;
[0047]1‑2‑
1、半反半透面,1
‑2‑
2、透射面;
[0048]1‑3‑
1、主反射镜面板,1
‑3‑
2、轻量化斜筋ⅰ,1
‑3‑
3、外圆周ⅰ,1
‑3‑
4、轻量化孔ⅰ,1
‑3‑
5、翻边,1
‑3‑
6、基板接口,1
‑3‑
7、芯轴,1
‑3‑
8、基板轻量化槽,1
‑3‑
9、轻量化斜筋ⅱ,1
‑3‑
10、主反射镜,1
‑3‑
11、基板;
[0049]1‑4‑
1、碳纤维第三反射镜,1
‑4‑
2、第三反射镜柔性支撑,1
‑4‑
3、第三反射镜轻量化支撑;
[0050]1‑4‑1‑
1、第三反射镜面板,1
‑4‑1‑
2、轻量化斜筋ⅲ,1
‑4‑1‑
3、外圆周ⅱ,1
‑4‑1‑
4、第三反射镜接口,1
‑4‑1‑
5、芯轴ⅱ;
[0051]1‑4‑2‑
1、反射镜接口ⅰ,1
‑4‑2‑
2、柔性连杆ⅰ,1
‑4‑2‑
3、刚性连杆ⅰ,1
‑4‑2‑
4、外部接口ⅰ,1
‑4‑2‑
5、线切割穿丝孔ⅰ;
[0052]1‑4‑3‑
1、上端接口ⅰ,1
‑4‑3‑
2、下端接口ⅰ,1
‑4‑3‑
3、轻量化孔ⅱ,1
‑4‑3‑
4、支撑斜筋;
[0053]1‑5‑
1、碳纤维第四反射镜,1
‑5‑
2、第四反射镜柔性支撑;
[0054]1‑5‑1‑
1、第四反射镜面板,1
‑5‑1‑
2、轻量化斜筋ⅳ,1
‑5‑1‑
3、外圆周ⅲ,1
‑5‑1‑
4、
第四反射镜接口,1
‑5‑1‑
5、芯轴ⅲ;
[0055]1‑5‑2‑
1、反射镜接口ⅱ,1
‑5‑2‑
2、柔性连杆ⅱ,1
‑5‑2‑
3、刚性连杆ⅱ,1
‑5‑2‑
4、外部接口ⅱ,1
‑5‑2‑
5、线切割穿丝孔ⅱ;
[0056]1‑6‑
1、可见光焦面筒,1
‑6‑
2、可见光焦面电箱;
[0057]1‑6‑1‑
1、上端接口ⅱ,1
‑6‑1‑
2、承力筒,1
‑6‑1‑
3、下端接口ⅱ;
[0058]1‑6‑2‑
1、可见光焦面,1
‑6‑2‑
2、电箱接口,1
‑6‑2‑
3、电箱壳体ⅰ,1
‑6‑2‑
4、数据接口,1
‑6‑2‑
5、电箱后盖,1
‑6‑2‑
6、棱镜;
[0059]2‑1‑
1、镜筒,2
‑1‑
2、镜座,2
‑1‑
3、压圈,2
‑1‑
4、透镜;
[0060]2‑2‑
1、红外焦面,2
‑2‑
2、红外焦面接口,2
‑2‑
3、电路板ⅱ,2
‑2‑
4、电箱壳体ⅱ,2
‑2‑
5、数据传输接口。
具体实施方式
[0061]
下面结合附图并举实施例,对本发明进行详细描述。
[0062]
本实施例提供了一种中心支撑的碳纤维多功能遥感相机,能够实现遥感相机的超轻量化、多功能设计。
[0063]
如图1所示,该遥感相机包括:可见光相机1、碳纤维承力塔组件1
‑
1和红外相机2,可见光相机1和红外相机2通过碳纤维承力塔组件1
‑
1同轴支撑,碳纤维承力塔组件1
‑
1起中心支撑作用,由此形成的遥感相机同时具备可见光探测和红外成像这两个功能。
[0064]
如图2所示,可见光相机1包括:碳纤维第一反射镜1
‑
3、碳纤维第二反射镜1
‑
2、碳纤维第三反射镜组件1
‑
4、碳纤维第四反射镜组件1
‑
5和可见光焦面组件1
‑
6;如图3所示,红外相机2包括:碳纤维第一反射镜1
‑
3、碳纤维第二反射镜1
‑
2、透镜组件2
‑
1和红外焦面组件2
‑
2;其中,碳纤维第一反射镜1
‑
3和碳纤维第二反射镜1
‑
2为可见光相机1与红外相机2共用;
[0065]
碳纤维承力塔组件1
‑
1中的承力塔基板接口1
‑1‑
4和可见光焦面组件1
‑
6分别通过碳纤维第一反射镜1
‑
3上的基板接口1
‑3‑
6与碳纤维第一反射镜1
‑
3连接,以实现碳纤维第一反射镜1
‑
3和碳纤维承力塔组件1
‑
1的一端以及可见光焦面组件1
‑
6与碳纤维第一反射镜1
‑
3之间的连接;碳纤维第二反射镜1
‑
2和透镜组件2
‑
1通过承力塔二镜接口1
‑1‑
2与碳纤维承力塔组件1
‑
1的另一端连接,透镜组件2
‑
1通过红外焦面接口2
‑2‑
2与红外焦面组件2
‑
2连接;碳纤维第三反射镜组件1
‑
4通过其下端接口ⅰ1
‑4‑3‑
2与碳纤维承力塔组件1
‑
1上的承力塔基板接口1
‑1‑
4连接;碳纤维第四反射镜组件1
‑
5通过承力塔四镜接口1
‑1‑
3与碳纤维承力塔组件1
‑
1连接;
[0066]
其中,碳纤维承力塔组件1
‑
1设计时,采用拼接式方案,能够显著降低制作工艺的难度;如图4所示,碳纤维承力塔组件1
‑
1包括:竖直支架1
‑1‑
1、上端碳纤圆环、主承力结构和下端碳纤圆环;上端碳纤圆环、主承力结构和下端碳纤圆环从上到下依次同轴分布;其中,主承力结构作为碳纤维承力塔组件1
‑
1的中间层,其为圆台状筒体结构,其周向均匀设置三个竖直支架1
‑1‑
1,每个竖直支架1
‑1‑
1为长条状薄片结构,且长度方向与主承力结构的轴向平行,宽度方向沿主承力结构的径向,厚度方向沿主承力结构的周向,三个竖直支架1
‑1‑
1的上端和下端分别与上端碳纤圆环和下端碳纤圆环连接,上端碳纤圆环上留有承力塔二镜接口1
‑1‑
2,下端碳纤圆环上留有承力塔基板接口1
‑1‑
4,主承力结构的小端留有承
力塔四镜接口1
‑1‑
3;为了提高该遥感相机的传函,设计时考虑降低碳纤维承力塔组件1
‑
1的遮光面积,将竖直支架1
‑1‑
1的上端沿着主承力结构的径向加宽,下端沿着主承力结构的周向加厚,这样的设计方案在提高碳纤维承力塔组件1
‑
1支撑刚度的同时,能够保证搭载其上的光学元件的面形精度;
[0067]
碳纤维第二反射镜1
‑
2设计时,选择红外光学材料,如锗等;如图5所示,碳纤维第二反射镜1
‑
2为圆柱形结构,其轴向一端所在的端面为光线入射面,该表面上镀半反射、半透射膜,作为半反半透面1
‑2‑
1,其具备半反射和半透射能力,另一端所在的端面为透射面1
‑2‑
2;其中,碳纤维第二反射镜1
‑
2通过压圈或包边的形式固定在镜座内;
[0068]
如图6所示,碳纤维第一反射镜1
‑
3包括:主反射镜1
‑3‑
10和基板1
‑3‑
11;主反射镜1
‑3‑
10为圆环结构,其外圆周ⅰ1
‑3‑
3和内圆周之间同轴设有翻边1
‑3‑
5,主反射镜1
‑3‑
10和基板1
‑3‑
11采用一体式同轴设计,二者的中心轴为芯轴1
‑3‑
7;碳纤维第一反射镜1
‑
3设计时,首先,根据光学系统给出的主反射镜1
‑3‑
10的直径、通光孔径等参数,依据径厚比的设计经验,确定主反射镜1
‑3‑
10的主反射镜面板1
‑3‑
1的尺寸;然后,根据主反射镜1
‑3‑
10的直径尺寸、通光孔的直径、实际的光学加工能力和刚度面形要求等,确定翻边1
‑3‑
5和外圆周ⅰ1
‑3‑
3之间设置的轻量化斜筋ⅰ1
‑3‑
2的密度、分布形式和厚度尺寸;轻量化斜筋ⅰ1
‑3‑
2可以采用常规的矩形或三角形或者扇形布局等;根据经验,当主反射镜1
‑3‑
10的直径尺寸较大时,轻量化斜筋ⅰ1
‑3‑
2通常采用三角形布置方式,直径尺寸较小时,轻量化斜筋ⅰ1
‑3‑
2可以采用扇形布置方式;
[0069]
基板1
‑3‑
11为正多边形或圆形框架结构,其周向开有基板轻量化槽1
‑3‑
8,基板1
‑3‑
11与芯轴1
‑3‑
7之间交错设有轻量化斜筋ⅱ1
‑3‑
9,并在轻量化斜筋ⅱ1
‑3‑
9的交汇处留有碳纤维承力塔组件1
‑
1的接口和可见光焦面组件1
‑
6的接口;在基板1
‑3‑
11的侧面或下端面设计基板接口1
‑3‑
6;当主反射镜1
‑3‑
10和基板1
‑3‑
11的主体尺寸全部确定后,对其进行初步的有限元仿真分析,根据固有频率、应力分布、面形等重要指标,对主反射镜1
‑3‑
10进行优化设计,通过迭代使主反射镜1
‑3‑
10满足设定的设计要求;
[0070]
如图7所示,碳纤维第三反射镜组件1
‑
4包括:碳纤维第三反射镜1
‑4‑
1、第三反射镜柔性支撑1
‑4‑
2和第三反射镜轻量化支撑1
‑4‑
3;碳纤维第三反射镜1
‑4‑
1为圆盘形结构,其中心设有通光孔,第三反射镜轻量化支撑1
‑4‑
3采用圆筒形结构形式,碳纤维第三反射镜1
‑4‑
1通过第三反射镜柔性支撑1
‑4‑
2安装在第三反射镜轻量化支撑1
‑4‑
3的轴向一端,第三反射镜轻量化支撑1
‑4‑
3的轴向另一端支撑在三角形底座上;其中,如图8所示,碳纤维第三反射镜1
‑4‑
1包括:第三反射镜面板1
‑4‑1‑
1、轻量化斜筋ⅲ1
‑4‑1‑
2和芯轴ⅱ1
‑4‑1‑
5,第三反射镜面板1
‑4‑1‑
1为圆环形面板,其同轴套装在芯轴ⅱ1
‑4‑1‑
5上,且第三反射镜面板1
‑4‑1‑
1和芯轴ⅱ1
‑4‑1‑
5之间沿芯轴ⅱ1
‑4‑1‑
5的周向设置三个以上轻量化斜筋ⅲ1
‑4‑1‑
2,每个轻量化斜筋ⅲ1
‑4‑1‑
2为直角梯形片状结构,其高度所在方向的一端与芯轴ⅱ1
‑4‑1‑
5的外圆周面相连,长底边与第三反射镜面板1
‑4‑1‑
1相连,高度所在方向一端的相对端与外圆周ⅱ1
‑4‑1‑
3相连;在芯轴ⅱ1
‑4‑1‑
5的外圆周面上留有第三反射镜接口1
‑4‑1‑
4;
[0071]
碳纤维第三反射镜组件1
‑
4设计时,首先确定碳纤维第三反射镜1
‑4‑
1的拓扑形式和尺寸结构,再根据光学系统给出的碳纤维第三反射镜1
‑4‑
1的直径和其中心通光孔的孔径等参数,依据径厚比的设计经验,确定碳纤维第三反射镜1
‑4‑
1的第三反射镜面板1
‑4‑1‑
1的尺寸;然后,根据碳纤维第三反射镜1
‑4‑
1的直径尺寸、中心通光孔的孔径、实际的光学
加工能力和刚度面形要求等,确定轻量化斜筋ⅲ1
‑4‑1‑
2的密度、分布形式和厚度尺寸;
[0072]
如图9所示,第三反射镜柔性支撑1
‑4‑
2采用圆环形结构,材料为殷钢,在第三反射镜柔性支撑1
‑4‑
2的端面上通过线切割的方式开设有两圈环形槽或正多边形槽,每圈环形槽沿周向均匀分为三段以上弧形槽,每圈正多边形槽沿周向均匀分为三段以上条形槽,内圈环形槽或正多边形槽中的相邻两段之间通过内环的刚性连杆ⅰ1
‑4‑2‑
3连接,外圈环形槽或正多边形槽中的相邻两段之间通过外环的刚性连杆ⅰ1
‑4‑2‑
3连接,且内外环的刚性连杆ⅰ1
‑4‑2‑
3错位设置,内外两圈环形槽或正多边形槽之间形成六段柔性连杆ⅰ1
‑4‑2‑
2;第三反射镜柔性支撑1
‑4‑
2的圆环内壁面与碳纤维第三反射镜1
‑4‑
1的芯轴ⅱ1
‑4‑1‑
5连接,圆环外壁面上沿周向留有一个以上外部接口ⅰ1
‑4‑2‑
4,所有外部接口ⅰ1
‑4‑2‑
4与上端接口ⅰ1
‑4‑3‑
1连接;第三反射镜柔性支撑1
‑4‑
2的内圆周面上设有反射镜接口ⅰ1
‑4‑2‑
1,反射镜接口ⅰ1
‑4‑2‑
1和碳纤维第三反射镜1
‑4‑
1的第三反射镜接口1
‑4‑1‑
4连接,内环的刚性连杆ⅰ1
‑4‑2‑
3和外环的刚性连杆ⅰ1
‑4‑2‑
3之间通过柔性连杆ⅰ1
‑4‑2‑
2连接;其中,每段弧形槽或条形槽的两端分别为线切割穿丝孔ⅰ1
‑4‑2‑
5,用于线切割形成对应的弧形槽或条形槽,从而得到刚柔结构相间的第三反射镜柔性支撑1
‑4‑
2,其目的是为了保证第三反射镜不变形;
[0073]
如图10所示,第三反射镜轻量化支撑1
‑4‑
3分为上中下三层,上下两端分别是上端接口ⅰ1
‑4‑3‑
1和下端接口ⅰ1
‑4‑3‑
2;上端接口ⅰ1
‑4‑3‑
1连接第三反射镜柔性支撑1
‑4‑
2,下端接口ⅰ1
‑4‑3‑
2设置在三角形底座上,其为外界接口;中间层是承力结构,由中间薄壁圆筒和沿周向均匀设置在薄壁圆筒周围的三组支撑斜筋1
‑4‑3‑
4组成;每两个支撑斜筋1
‑4‑3‑
4之间,在薄壁圆筒上开有“米”字形轻量化孔ⅱ1
‑4‑3‑
3,薄壁圆筒的圆周面上沿周向共开设三组轻量化孔ⅱ1
‑4‑3‑
3;
[0074]
如图11所示,碳纤维第四反射镜组件1
‑
5包括:碳纤维第四反射镜1
‑5‑
1和第四反射镜柔性支撑1
‑5‑
2;碳纤维第四反射镜1
‑5‑
1为圆盘形结构,其中心设有通光孔;第四反射镜柔性支撑1
‑5‑
2安装在碳纤维第四反射镜1
‑5‑
1的轴向一端;其中,碳纤维第四反射镜1
‑5‑
1与碳纤维第三反射镜1
‑4‑
1相似,如图12所示,碳纤维第四反射镜1
‑5‑
1包括:第四反射镜面板1
‑5‑1‑
1、轻量化斜筋ⅳ1
‑5‑1‑
2和芯轴ⅲ1
‑5‑1‑
5;第四反射镜面板1
‑5‑1‑
1为圆环形面板,其同轴套装在芯轴ⅲ1
‑5‑1‑
5上,且第四反射镜面板1
‑5‑1‑
1和芯轴ⅲ1
‑5‑1‑
5之间沿芯轴ⅲ1
‑5‑1‑
5的周向设置三个以上轻量化斜筋ⅳ1
‑5‑1‑
2,每个轻量化斜筋ⅳ1
‑5‑1‑
2为直角梯形片状结构,其高度所在方向的一端与芯轴ⅲ1
‑5‑1‑
5的外圆周面相连,长底边与碳纤维第四反射镜1
‑5‑
1相连,高度所在方向一端的相对端与外圆周ⅲ1
‑5‑1‑
3相连;在芯轴ⅲ1
‑5‑1‑
5的外圆周面上留有第四反射镜接口1
‑5‑1‑
4;
[0075]
碳纤维第四反射镜组件1
‑
5设计时,首先确定碳纤维第四反射镜1
‑5‑
1的拓扑形式和尺寸结构,再根据光学系统给出的碳纤维第四反射镜1
‑5‑
1的直径、通光孔径等参数,依据径厚比设计经验,确定碳纤维第四反射镜1
‑5‑
1中第四反射镜面板1
‑5‑1‑
1的尺寸;然后,根据碳纤维第四反射镜1
‑5‑
1的直径、中间通光孔的直径、实际的光学加工能力和刚度面形要求等,确定轻量化斜筋ⅳ1
‑5‑1‑
2的密度、分布形式和厚度尺寸;
[0076]
如图13所示,第四反射镜柔性支撑1
‑5‑
2采用圆环形结构,材料为殷钢,在第四反射镜柔性支撑1
‑5‑
2的端面上通过线切割的方式开设有两圈环形槽或正多边形槽,每圈环形槽沿周向均匀分为三段以上弧形槽,每圈正多边形槽沿周向均匀分为三段以上条形槽,
内圈环形槽或正多边形槽中的相邻两段之间通过内环的刚性连杆ⅱ1
‑5‑2‑
3连接,外圈环形槽或正多边形槽中的相邻两段之间通过外环的刚性连杆ⅱ1
‑5‑2‑
3连接,且内外环的刚性连杆ⅱ1
‑5‑2‑
3错位设置,内外两圈环形槽或正多边形槽之间形成六段柔性连杆ⅱ1
‑5‑2‑
2;第四反射镜柔性支撑1
‑5‑
2的圆环内壁面与碳纤维第四反射镜1
‑5‑
1的芯轴ⅲ1
‑5‑1‑
5连接,圆环外壁面上沿周向留有一个以上外部接口ⅱ1
‑5‑2‑
4,所有外部接口ⅱ1
‑5‑2‑
4与承力塔四镜接口1
‑1‑
3连接;第四反射镜柔性支撑1
‑5‑
2的内圆周面上设有反射镜接口ⅱ1
‑5‑2‑
1,反射镜接口ⅱ1
‑5‑2‑
1和碳纤维第四反射镜1
‑5‑
1的第四反射镜接口1
‑5‑1‑
4连接,内环的刚性连杆ⅱ1
‑5‑2‑
3和外环的刚性连杆ⅱ1
‑5‑2‑
3之间通过柔性连杆ⅱ1
‑5‑2‑
2连接;其中,每段弧形槽或条形槽的两端分别为线切割穿丝孔ⅱ1
‑5‑2‑
5,用于线切割形成对应的弧形槽或条形槽,从而得到刚柔结构相间的第四反射镜柔性支撑1
‑5‑
2,其目的是为了保证第四反射镜不变形;
[0077]
如图14所示,可见光焦面组件1
‑
6包括:可见光焦面筒1
‑6‑
1和可见光焦面电箱1
‑6‑
2;可见光焦面筒1
‑6‑
1为圆锥状筒体,可见光焦面电箱1
‑6‑
2设置在可见光焦面筒1
‑6‑
1的小端;其中,如图15所示,可见光焦面筒1
‑6‑
1包括:承力筒1
‑6‑1‑
2和设置在承力筒1
‑6‑1‑
2轴向两端的上端接口ⅱ1
‑6‑1‑
1和下端接口ⅱ1
‑6‑1‑
3;如图16所示,可见光焦面电箱1
‑6‑
2包括:可见光焦面1
‑6‑2‑
1、电箱壳体ⅰ1
‑6‑2‑
3、电箱后盖1
‑6‑2‑
5和棱镜1
‑6‑2‑
6;电箱壳体ⅰ1
‑6‑2‑
3为长方体框架结构,其相对的两端分别设有圆形的电箱接口1
‑6‑2‑
2和电箱后盖1
‑6‑2‑
5,电箱接口1
‑6‑2‑
2用于将电箱壳体ⅰ1
‑6‑2‑
3与可见光焦面筒1
‑6‑
1的小端连接;电箱壳体ⅰ1
‑6‑2‑
3内部设有可见光焦面1
‑6‑2‑
1,电箱壳体ⅰ1
‑6‑2‑
3的侧面设有数据接口1
‑6‑2‑
4和棱镜1
‑6‑2‑
6;
[0078]
可见光焦面组件1
‑
6设计时,通过光学系统的焦距确定可见光焦面筒1
‑6‑
1的轴向高度;根据基板1
‑3‑
11的尺寸和轻量化斜筋ⅱ1
‑3‑
9的分布位置确定可见光焦面筒1
‑6‑
1的上端接口ⅱ1
‑6‑1‑
1;根据可见光焦面1
‑6‑2‑
1位置和尺寸确定可见光焦面筒1
‑6‑
1的下端接口ⅱ1
‑6‑1‑
3;安装探测器时保证其感光面和可见光焦面1
‑6‑2‑
1对准,具体可以通过调节可见光焦面筒1
‑6‑
1和可见光焦面电箱1
‑6‑
2之间的垫圈来修正;根据成像电子学的功能要求确定电箱壳体ⅰ1
‑6‑2‑
3内电路板的尺寸、型号和数量,然后,确定电箱壳体ⅰ1
‑6‑2‑
3的尺寸及其上数据接口1
‑6‑2‑
4的数量和位置分布;
[0079]
如图17所示,透镜组件2
‑
1包括:镜筒2
‑1‑
1、镜座2
‑1‑
2和透镜2
‑1‑
4;透镜组件2
‑
1设计时,镜筒2
‑1‑
1为阶梯轴状多段筒体,且直径从一端向另一端逐渐增大,相邻筒体之间通过圆台状筒体同轴连接,镜筒2
‑1‑
1内壁面上沿轴向设置两个以上镜座2
‑1‑
2,每个镜座2
‑1‑
2内沿镜筒2
‑1‑
1的圆周方向设置一个环形凹槽,每个镜座2
‑1‑
2内设置一个透镜2
‑1‑
4;相邻镜座2
‑1‑
2之间通过精修端面或精修垫圈的方式调节其在镜筒2
‑1‑
1内的轴向间隔,镜座2
‑1‑
2精车外圆周后装入镜筒2
‑1‑
1;镜筒2
‑1‑
1的大端通过该端的圆周法兰接口与碳纤维承力塔组件1
‑
1连接,小端通过该端的圆周法兰接口与红外焦面组件2
‑
2连接;通过垫片调节镜筒2
‑1‑
1和红外焦面组件2
‑
2之间的相对位置,保证探测器感光面精确对准;
[0080]
如图18所示,红外焦面组件2
‑
2包括:红外焦面2
‑2‑
1、电路板ⅱ2
‑2‑
3和电箱壳体ⅱ2
‑2‑
4;红外焦面组件2
‑
2设计时,红外焦面2
‑2‑
1由光学系统给定,安装探测器时保证其感光面和红外焦面2
‑2‑
1对准,具体可以通过调节垫圈来修正;探测器后面依次设置电路板ⅱ2
‑2‑
3和电源等成像电子学组件;根据成像电子学的功能要求确定电路板ⅱ2
‑2‑
3的尺
寸、型号和数量,然后,确定包裹电路板ⅱ2
‑2‑
3的电箱壳体ⅱ2
‑2‑
4的尺寸以及电箱壳体ⅱ2
‑2‑
4上设置的数据传输接口2
‑2‑
5的数量和位置分布;电箱壳体ⅱ2
‑2‑
4的上留有基准棱镜的安装接口和红外焦面接口2
‑2‑
2,红外焦面接口2
‑2‑
2用于连接红外焦面组件2
‑
2与透镜组件2
‑
1。
[0081]
至此,该中心支撑的碳纤维多功能遥感相机的结构初步设计完毕,根据设计指标,对相机整体结构进行有限元仿真分析,优化该相机的结构尺寸,提升该相机的固有频率和动态响应,改善光学元件的支撑面形质量;最后,得到优化后的多功能遥感相机模型;经测量,该相机总长710mm,最大直径420mm,重量小于10kg,且一、二、三、四反射镜面形仿真结果皆优于10nm,相机整机的一阶段固有频率高于120hz,满足超轻型碳纤维多功能遥感相机设计要求。
[0082]
综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1