致动器和投影设备的制作方法
1.本技术涉及投影设备领域,具体而言,涉及一种致动器和投影设备。
背景技术:
2.在投影系统中,可以通过使两帧连续图像彼此偏移且交错的方式生成比空间光调制器(spatial light modulator,slm)像素数量更高分辨率的图像,这种显示方案被称为扩展像素分辨率(extended pixel resolution,xpr)。xpr致动器通常使用音圈电机(voice coil motor,vcm)周期性地驱动振镜框,使固定于其上的玻片也周期性的振动以实现图像的偏移。
3.在xpr致动器中,电磁驱动力的大小决定了玻片翻转的速度,在使用大尺寸slm的显示系统中,振镜框转动惯量高,线圈承受发热风险较大。振镜框通常在扭力梁位置处采用挖槽等方式降低其局部刚度,同时振镜框的其他区域均采用实心结构,这种设计使得振镜框转动惯量高,对驱动力的需求高。
技术实现要素:
4.本技术实施例提出了一种致动器和投影设备,以解决上述技术问题。
5.本技术实施例通过以下技术方案来实现上述目的。
6.第一方面,本技术实施例提供一种致动器,包括振镜框、致动组件以及胶黏件。振镜框包括连接臂,连接臂包括挖空部,连接臂围合形成中心固定部,中心固定部用于固定光学元件;致动组件固定于连接臂,用于周期性地驱动振镜框;胶黏件粘接于致动组件与连接臂朝向中心固定部的连接处。
7.第二方面,本技术实施例提供一种投影设备。投影设备包括上述任一实施方式的致动器。
8.本技术提供的致动器和投影装置,通过在连接臂设置挖空部,从而降低振镜框的转动惯量;通过在致动组件与连接臂朝向中心固定部的连接处设置胶黏件以加强振镜框的局部刚度,从而改善了振镜框的振动形态。振镜框结构简单,使振镜框具有更好的可加工性和更低的加工成本,同时致动器的转动惯量更低,对驱动力的需求更低,xpr致动器中线圈需要提供的电磁力减小,降低了线圈的发热风险。
附图说明
9.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
10.图1示出一种xpr驱动器的工作原理示意图。
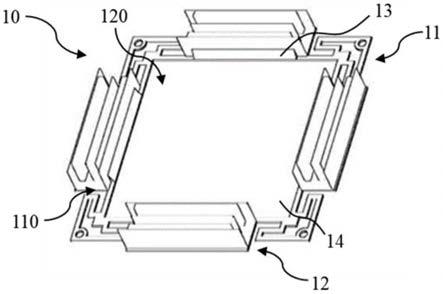
11.图2示出本技术一个实施例提供致动器的部分结构示意图。
12.图3示出图2的致动器的另一视角的部分结构示意图。
13.图4示出图2的致动器的振镜框的结构示意图。
14.图5示出图3的ⅰ处的放大示意图。
15.图6示出本技术另一个实施例提供的致动器的结构示意图。
16.图7示出本技术另一个实施例提供的致动器的结构示意图。
17.图8示出图6的致动器的振镜框的结构示意图。
18.图9示出图6的致动器的另一视角的结构示意图。
具体实施方式
19.为了使本技术领域的人员更好地理解本技术方案,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
20.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述。
21.投影系统的像素分辨率可能受到由空间光调制器(digtial micromirror devices,dmd)提供的镜数量的限制,为了提供超过dmd上的镜数量的像素分辨率,一些投影系统在投影路径中提供了用于将由dmd生成的图像移位的致动器。例如,由dmd生成的两个连续图像可以彼此偏移且交错以生成更高分辨率的图像。
22.一般地,相关技术中的xpr双轴线致动器还包含投影路径中的光学元件,该光学元件用于使图像在竖直方向上移位半个像素并且在水平方向上移位半个像素,从而利用每个dmd镜生成四个屏幕上像素。致动器放置在投影透镜的前方。窗口通过方波形或正弦波形上下且前后倾斜,以折射或移位像素。
23.请参阅图1,图1示出了一种xpr驱动器的工作原理。光学元件100为折射率为n的透明塑料平板(或者其他折射率大于空气的透明材质)。光学元件100装配在第一轴上面,可以沿一个方向实现倾斜,同时存在另一个正交方向的轴,可以实现另一个方向的倾斜。光线101代表一条光线反射到dmd上之后出射向光学元件100的光线,其他像素的光线方向与光线101是平行的。图示中表示光学元件100沿着与光线101垂直的方向偏转了角度θ,并且光学元件100的厚度为t。光线101穿过光学元件100后,根据折射定律,原本按照方向105前进的光线,由于光学元件100的折射,导致沿着方向107前进,以此实现了
△
y的光线位移。因此调整适当的
△
y,θ,以及t的数值,可以实现像素的定量偏移。
24.在致动器中,电磁驱动力的大小决定了光学元件翻转的速度,进而决定了致动器的最大工作频率。当线圈的匝数为n,通过的电流为i,线圈总截面积为s(即每匝截面积为s/n),线圈处于磁感应强度为b的匀强磁场中的长度为l,导线电阻率为ρ时,则线圈受到的电磁力f
em
为:
25.f
em
=nbil
26.线圈的电阻为
27.r=(n
·
l
·
ρ)/(s/n)
28.线圈中处于磁场内的部分的热功耗q为:
[0029][0030]
即,当线圈电导率、磁感应强度、磁场中线圈长度、线圈总截面积固定时,线圈上的热功耗q与电磁力f
em
的平方成正比。在使用大尺寸slm的显示系统中,致动器中光学元件尺寸越大、质量越重,工作在相同频率下时需要的电磁驱动力也越大,导致xpr致动器中线圈需要提供的电磁力随之增大,根据上述关系可知线圈将承受巨大的发热风险。此时,若振镜框的应力应变集中区域刚度不够,则振镜框易发生变形而导致无法带动光学元件偏转。
[0031]
请一并参阅图2和图3,本技术实施例提供一种致动器10,致动器10包括振镜框11、致动组件12以及胶黏件13,振镜框11包括连接臂110,连接臂110围合形成中心固定部120,中心固定部120用于固定光学元件14,连接臂110包括挖空部111,致动组件12用于周期性地驱动振镜框11,致动组件12固定连接于连接臂110,胶黏件13粘接于致动组件12与连接臂之间的夹角α处,胶黏件13用于加强连接臂110的刚度。可以理解地,挖空部111的设置可以减轻振镜框11的重量,从而降低振镜框11的转动惯量,对驱动力的需求更低。
[0032]
请参阅图4,在一种实施方式中,连接臂110包括第一臂1111、第二臂1112、第三臂1113和第四臂1114。连接臂110包括挖空部111的情况下,挖空部111可以包括在第一臂1111、第二臂1112、第三臂1113和第四臂1114在各自中心处所设的通孔,多个通孔关于中心固定部120对称分布。通孔还可以作为固定孔,以便于致动组件12通过通孔固定于连接臂上,胶黏件13与致动组件12等长地设于连接臂110的第一臂1111、第二臂1112、第三臂1113和第四臂1114朝向中心固定部的连接处,加强连接臂110的刚度。
[0033]
在一种实施方式中,第一臂1111设有多个间隔分布的通孔,或者第二臂1112设有多个间隔分布的通孔,或者第三臂1113设有多个间隔分布的通孔,或者第四臂1114设有多个间隔分布的通孔,多个通孔可以进一步地减轻振镜框11的重量。通孔可以不对称的设置于连接臂110。
[0034]
可以理解的是,本实施例中致动组件12可以粘接在连接臂110上固定孔111之外的部分实现固定连接,在其他实施例中致动组件12也可以嵌设于固定孔111内等其他方式实现固定连接。
[0035]
在一种实施方式中,挖空部111也可以为盲孔,固定孔111采用盲孔或者通孔设计,都是为了降低振镜框11的重量,继而可以降低振镜框11的转动惯量。
[0036]
致动组件12可以固定连接于固定孔111,以带动振镜框11周期性地运动。振镜框11的挖空部111可以采用大面积的镂空设计,以进一步降低振镜框11的转动惯量,例如,振镜框11可以除了连接框架之外的区域均挖空处理,连接框架指的是起到连接作用的部分振镜框11,连接框架用于与致动组件12、光学元件14以及其他组件连接。挖空部111的设置可以使得振镜框11的质量减小,进一步的减小振镜框11的转动惯量,使得振镜框11对驱动力的需求降低。
[0037]
中心固定部120由连接臂110围合形成,第一臂1111、第二臂1112、第三臂1113和第四臂1114围合使得中心固定部120呈矩形,中心固定部120可以为中心固定框,光学元件14可以固定于中心固定框中,光学元件14可以为透明塑料平板,或者光学元件14可以为其他透明材质制成,例如玻璃,光学元件14的折射率不等于空气折射率,在一种实施方式中,光学元件14的折射率大于空气的折射率。光学元件14可以通过胶粘的方式固定于振镜框11,
光学元件14也可以通过其他方式固定于振镜框11,例如螺钉或者卡扣配合等,在本实施方式中不做限定。
[0038]
振镜框11可以为金属材料制成,例如合金材料,振镜框11可以呈矩形,在一种实施方式中,振镜框11除挖空部外的部分为等厚度的金属片材,在本实施方式中,振镜框11无需额外设计复杂的结构以与其他组件固定连接,使得振镜框11结构简单,便于加工,降低了振镜框11的加工成本。
[0039]
振镜框11还包括扭力梁130,扭力梁130可以位于相邻连接臂110的连接处,即第一臂1111、第二臂1112、第三臂1113和第四臂1114相邻的连接臂的连接处。在一种实施方式中,扭力梁130可以设置于矩形振镜框11的四个顶点处,在一种实施方式中,扭力梁130处也可以采用镂空挖槽等方式进一步降低振镜框11的局部刚度,使得振镜框11在选定的频率下获得左右/前后振型的本振模式。
[0040]
在一种实施方式中,致动组件12用于沿垂直于振镜框11的方向驱动振镜框11振动,致动器10带动光学元件14运动。致动组件12包括第一致动件121、第二致动件122、第三致动件123和第四致动件124,第一致动件121、第二致动件122、第三致动件123和第四致动件124分别固定于第一臂1111、第二臂1112、第三臂1113和第四臂1114。其中,第一致动件121、第二致动件122、第三致动件123和第四致动件124可以为相同结构,第一致动件121、第二致动件122、第三致动件123和第四致动件124可以为磁缸。当第一致动件121、第二致动件122、第三致动件123和第四致动件124为磁缸时,则与磁缸对应的线圈设置于底座16,磁缸在外置的通电线圈驱动下受到周期性的垂直于振镜框11方向的驱动力。在一种实施方式中,第一致动件121和第三致动件123相对设置,第一致动件121和第三致动件123在同一时刻受到的驱动力方向相反;第二致动件122和第四致动件124相对设置,第二致动件122和第四致动件124在同一时刻受到的驱动力方向相反。
[0041]
请参阅图5,致动组件12与连接臂110之间形成夹角α,在一种实施方式中,夹角α朝向中心固定部120,夹角α可以为直角,致动组件12对振镜框11产生垂直于振镜框11表面的驱动力。
[0042]
若采用实心结构,则振镜框11的转动惯量较大,需要较大的驱动力进行驱动,对大slm系统驱动组件提出更高的要求。由于振镜框11包括挖空部111,使得非扭力梁130区域容易发生形变,故在对振镜框11进行挖槽或者镂空设计以降低振镜框11的转动惯量的基础上,通过设置胶黏件13以增强连接臂110与致动组件12之间连接时的刚度。胶黏件13可以设置于第一致动件121与第一臂1111之间的朝向中心固定部120的夹角处,还可以设置于第二致动件122与第二臂1112之间的朝向中心固定部120的夹角处,还可以设置于第三致动件123与第三臂1113之间的朝向中心固定部120的夹角处,还可以设置于第四致动件124与第四臂1114之间之间的朝向中心固定部120的夹角处,例如,胶黏剂13可以与第一臂1111、第二臂1112、第三臂113和第四臂1114等长,并粘接于第一致动件121与第一臂1111、第二致动件122与第二臂1112、第三致动件123与第三臂1113、第四致动件124与第四臂1114之间的夹角α处。胶黏件13用于加强第一臂1111、第二臂1112、第三臂1113和第四臂1114的刚度。胶黏件13的两侧边缘分别与致动组件12和连接臂110连接并覆盖部分致动组件12的表面和部分连接臂110的表面。
[0043]
胶黏件13可以为胶黏剂,胶黏剂可以通过界面的黏附和内聚等作用,使两种或两
种以上的制件或材料连接在一起,例如胶黏件13可以为硬质胶黏剂。胶黏件13的设置不仅可以加强连接臂110的刚度,胶黏件13也可以辅助致动组件12与连接臂110之间的固定连接,使得致动组件12稳定连接于连接臂110而不易发生晃动,避免影响致动器10偏移的精度。
[0044]
在一种实施方式中,胶黏件13的剪切模量e>5mpa,密度ρ<2.0g/cm3。较高的剪切模量和较低的密度使得胶黏件13可以有效的加强连接臂110的刚度,使振镜框11受到致动组件12驱动时,振镜框11不易变形,从而振镜框11可以有效地带动光学元件14偏转。镂空设计的振镜框11转动惯量小,同时胶黏件13的密度远低于振镜框11的密度,使得胶黏件13的设置对振镜框11的转动惯量的影响小,对致动器10系统的本振频率和振型影响极小,使得致动器10系统具有良好的抗公差特性,同时xpr致动器中线圈需要提供的电磁力减小,降低了线圈的发热风险。
[0045]
请参阅图6,致动器10还包括底座16,底座16的投影面积可以略大于振镜框11的投影面积,以将振镜框11稳定固定于底座16,振镜框11还设有安装孔113,通过螺钉穿过安装孔113将振镜框11固定于底座16。在一种实施方式中,底座16包括通光孔,通光孔的投影面积可以略大于中心固定部120的投影面积,这样的设置使得光线可以透过光学元件14发生折射,以最终实现像素的定量偏移。
[0046]
请参阅图2,图2示出本实施例提供的致动器10的结构示意图。振镜框11材料为不锈钢sus403。本实施例中将四个磁缸分别固定于四个固定孔111,光学元件14固定于中心固定部120,磁缸在外置的通电线圈驱动下受到周期性的垂直振镜框11方向的驱动力。其中,每组相对的磁缸在同一时刻受到的驱动力方向相反,从而使中间的光学元件14发生倾斜,从而起到位移像素的作用。发明人通过结构应力分析发现,现有技术的振镜框受到电磁力驱动时,连接臂刚度较弱,容易形变而发生局部低频振动。因此本技术在此处采用硬质胶黏剂,例如采用一种紫外固化胶黏剂(delo gb368,密度ρ=1.0g/cm3,剪切模量17mpa,杨氏模量900mpa)作为胶黏件13,构建局部加强筋结构增强连接臂110刚度,胶黏件13条状设置于连接臂110。
[0047]
经比较,在振镜框两侧施加垂直于振镜框表面且方向相反的电磁力时,无胶黏剂的振镜框将在连接臂110处产生局部形变,使整个结构的振型无法有效的实现光学元件14偏转,而使用胶黏件13作为加强筋的振镜框11能够有效的提高此区域刚度,当在振镜框11两侧施加方向相反的电磁力时,能够有效地实现光学元件14偏转。
[0048]
请一并参阅图7和图8,图7示出本技术另一实施例的致动器20的结构示意图,图8示出本实施例的致动器20的振镜框21的结构示意图,振镜框21可以由不锈钢sus304制成,振镜框21包括挖空部211,以降低系统转动惯量,挖空部211包括多个挖槽部225,多个挖空部211环绕中心固定部220分布,各个连接臂上的多个挖槽部225关于中心固定部220呈对称分布。
[0049]
振镜框21包括连接臂210,连接臂210包括第一臂2110、第二臂2111、第三臂2112和第四臂2113,第一臂2110、第二臂2111、第三臂2112和第四臂2113包围形成中心固定部220。第一致动件221固定于第一臂2110,第二致动件222固定于第二臂2111,第三致动件223固定于第三臂2112,第四致动件224固定于第四臂2113。
[0050]
在一种实施方式中,第一臂2110、第二臂2111、第三臂2112和第四臂2113均设有挖
槽部225,挖槽部225包括第一挖槽211、第二挖槽212、第三挖槽213和第四挖槽214,具体地,振镜框21在第一臂2110处设有第一挖槽211,在第二臂2111处设有第二挖槽212,在第三臂2112处设有第三挖槽213,在第四臂2113处设有第四挖槽214。进一步地,第一挖槽211、第二挖槽212、第三挖槽213以及第四挖槽214的数量可以分别为多个,在本实施例中数量具体为分别2个,更具体地,第一挖槽211、第二挖槽212、第三挖槽213以及第四挖槽214分别在第一臂2110处、第二臂2111处、第三臂2112处以及第四臂2113处分别沿第一臂2110、第二臂2111、第三臂2112以及第四臂2113的延伸方向对称设置。在连接臂210上在设置挖槽以降低转动惯量的基础上,通过设置胶黏件23以增加连接臂220的刚度。
[0051]
在本实施方式中,胶黏件23和第一挖槽211间隔地设置于第一致动件221与第一臂2110的连接处,胶黏件23和第二挖槽212间隔地设置于第二致动件222与第一臂2111的连接处,胶黏件23和第三挖槽213间隔地设置于第三致动件223与第三臂2112的连接处,胶黏件23和第四挖槽214间隔地设置于第四致动件224与第四臂2113的连接处。可以采用通过分段式的方式粘接胶黏件23,在本实施例中将胶黏件23设置于第一臂2110的两端和中点处,将胶黏件23设置于第二臂2111的两端和中点处,将胶黏件23设置于第三臂2112的两端和中点处,将胶黏件23设置于第四臂2113的两端和中点处。需要说明的是,连接臂210上挖槽的位置和数量不限于以上实施例中的描述,本实施例通过在连接臂210上不同位置设置多个挖槽以降低转动惯量,进一步地根据挖槽位置与致动组件的连接处使用分段的黏胶件23增加连接位置的刚度。请参阅图9,本实施例中的胶黏件23可以使用3m 1701粘合剂,其粘接金属的剪切强度为23.7mpa,密度为1.1g/cm3。
[0052]
在一种实施方式中,第一臂2110设有多个间隔分布的挖槽部,或者第二臂2111设有多个间隔分布的挖槽部,或者第三臂2112设有多个间隔分布的挖槽部,或者第四臂2113设有多个间隔分布的挖槽部,多个挖槽可以进一步地减轻振镜框11的重量。挖槽部可以不对称的设置于连接臂210。
[0053]
本技术实施例还提供一种投影设备。投影设备包括上述任一实施方式的致动器10。
[0054]
本技术提供的致动器10和投影装置,通过振镜框11的挖空设计,有效降低了振镜框11的转动惯量,采用胶黏件13加强振镜框11的局部刚度,从而改善了振镜框11的振动形态。避免了振镜框11具有复杂的结构设计,振镜框11结构简单,使振镜框11具有更好的可加工性和更低的加工成本,同时致动器10的转动惯量更低,对驱动力的需求更低,xpr致动器中线圈需要提供的电磁力减小,降低了线圈的发热风险。
[0055]
此外,术语“第一”、“第二”等仅用于区分描述,而不能理解为特指或特殊结构。术语“一些实施例”、“其他实施例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本技术的至少一个实施例或示例中。在本技术中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本技术中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
[0056]
以上实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施
例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的精神和范围,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1