用于捕获平板培养皿的图像的系统的制作方法
用于捕获平板培养皿的图像的系统
1.相关申请的交叉参考
2.本技术要求于2019年10月7日提交的美国临时申请no.63/088,695的优先权权益,该申请通过引用并入本文。
技术领域
3.本文描述了一种用于使用具有远心镜头的成像装置获得平板培养皿图像的系统。
背景技术:
4.平板培养(plated culture)是评估和测试用于微生物污染证据的样本的常用技术。各种类型的平板培养很受欢迎地用于从这些样本中制备微生物和细胞培养物,以便许多领域的研究和分析。用于接种培养基的容器的示例包括皮氏培养皿、微量滴定板或多孔板以及高密度格式板,例如384-、864-和1536
‑ꢀ
孔板。
5.平板培养皿通常包含支持微生物在平板培养皿上生长的培养基。在用样本接种平板培养皿后,培养平板培养皿以允许在样本中形成任何微生物污染的菌落。一些培养基是有选择性的,使得只有某些类型或菌株的微生物在平板培养皿中的培养基上生长。
6.检查经培养的平板以确定是否发生微生物生长。当观察到菌落时,会拾取一部分感兴趣的菌落并进行进一步分析,以了解有关微生物的更多信息。手动检查和拾取感兴趣的菌落非常耗时,并且需要微生物学家来完成这项高技能的工作。自动化越来越多地被应用于检查平板培养皿,以确定是否有菌落形成和/或微生物生长的证据。这种自动化通常包括获得平板培养皿的电子图像并将该图像显示给微生物学家,微生物学家可以识别感兴趣的菌落并控制系统拾取这样的菌落的一部分进行测试。可替换地,可以根据一组规则对图像数据进行评估和处理,以自动识别一个或多个感兴趣的菌落。
7.捕获样本培养物的电子图像以检测微生物生长通常需要与相机耦合的标准50-55mm f1.4摄影镜头。然而,这样的系统即使与高效的相机结合使用时也具有较差的灵敏度,因此许多培养物仍然需要数十分钟或更长时间的成像时间,并遭遇其他问题,例如渐晕(不希望的变暗)和横向失真效应,这可能会导致图像不是完全真实的样本培养物的图像。但是,此类系统中的这种失真效果确实提供了一些从平板侧面获取图像信息的能力。使用具有远心镜头的成像系统已经克服了这些缺点,该远心镜头提供培养平板的真实俯视图。远心镜头也是此类系统中其他镜头的经济替代品。然而,在具有远心镜头的系统中,入射在平板培养皿上的光线的方向使得它缺乏提供平板培养皿侧面的有用图像的失真。因此,要在获得平板培养皿的图像时有效地部署远心镜头,还需要进一步的改进。
技术实现要素:
8.本文描述的系统通过提供具有远心镜头的智能成像系统来解决上述问题,该远心镜头提供自动的、高分辨率数字成像。此外,本文所述的成像系统可以与培养箱结合以无缝地适配在自动化实验室环境中或成为与实验室操作员一起工作的独立单元。
9.如上所述,当使用远心镜头对诸如平板培养皿之类的物体成像时,入射到平板培养皿上的光线的方向使得它不能提供该平板培养皿侧面的清晰图像。平板培养皿的侧面可包含有用的信息,例如可以用作基准标记的标签,该标签用于在成像设备中对准平板培养皿。标签还可以携带条形码信息,该条形码信息识别平板培养皿以及诸如培养基类型、样本类型、样本日期等其他信息。
10.基准标记是有用的,因为通常将平板培养皿带到成像设备以在繁殖周期中多次获得平板培养皿的图像。为了自动评估平板培养皿所携带的培养样本中是否发生微生物生长以及达到何种程度,必须逐像素评估平板培养皿,以确定从较早图像到较晚图像的像素中是否发生了变化,该变化指示微生物生长。为了进行成功的逐像素比较,较早图像中的像素必须与较晚图像中的像素对准。
11.在用于评估平板培养皿以指示微生物生长迹象的自动化系统和方法中需要像素对准是已知的。例如,在本文所述的成像设备中,根据以下描述的方法对平板上的菌落进行成像:1)2016年4月22日题目为“colony contrastgathering”的pct/us2016/028913,其公开为wo/2016172527;以及2)题目为“a system and method for image acquisition using supervised high qualityimaging”的pct/ep2015/052017,其于2015年1月30日提交,并且公开号为wo2015/114121,这些申请以引用方式并入本文。如这些参考文献中所述,培养接种有样本的平板培养皿。一段时间后,获得经接种的培养皿的图像。然后将平板培养皿放回培养箱进行额外的繁殖。再过一段时间后,重新取出平板培养皿并再次成像。然后在逐个像素的基础上将较早的图像与较晚的图像进行比较。如上所述,为了做到这一点,成像设备必须将第一图像中的像素与第二图像中的像素对准,以识别像素中可能指示微生物生长的变化。
12.不同菌落与培养基的对比提供了区分菌落以促进自动化菌落拾取的能力。在这方面,条形码基准信息不仅可以用于将时间t
x
处的平板培养皿图像中的像素与较晚图像(时间t
x+1
处获得的图像,但可以参考由标签提供的基准信息来确定设备中感兴趣的菌落的位置,该设备用于拾取感兴趣的菌落进行下游测试,例如微生物鉴定和抗生素敏感性。
13.如上所述,在获得平板培养皿的初始图像后,将平板培养皿繁殖一段时间以允许平板上的微生物(如果存在的话)生长。在本文描述的系统的另一个示例中,系统执行以下自动化步骤:i)将平板培养皿定位在用于培养皿的台上;ii)获得定位在所述台中的平板培养皿的图像;iii)获得培养皿的标识; iv)将成像装置获得的图像与所存储的平板培养皿的初始图像进行比较,以获得关于所选微生物菌落位置的信息(以通知拾取工具装置关于要拾取的菌落的位置);以及,任选地,vi)获得关于对选择的微生物菌落进行的处理的处理指令。通过将放置在拾取工具装置中的培养皿的图像与初始图像进行比较,可以自动获得所选菌落的位置,例如通过计算机图像比较。
14.标签,或者更具体地标签的侧面,被用作在成像设备中定位平板培养皿的参考,以促进在第一较早时间获得的平板培养皿的图像与第二较晚时间的平板培养皿的图像的逐像素对准。如上所述,如果标签用于促进这种对准,则成像装置必须能够在图像信息中定位标签。
15.仅标签侧面不足以对准在不同时间获得的图像中的像素和识别感兴趣的菌落随时间的坐标。使用机器视觉设备,可以检测另一个参考点,例如皿的中心,从中可以确定皿
的坐标。可以参考它们距中心的相对距离和与标签零偏移的角度偏移来确定培养皿上菌落的位置。一旦确定了感兴趣的菌落的相对位置,就可以将平板培养皿移动到另一个系统,在另一个系统中执行以下两个步骤。例如,通过机械方式将皿居中。检测条形码零偏移,例如通过旋转皿同时具有固定传感器以检测条形码标签的存在并用条形码扫描仪扫描条形码。在这一点上,培养皿的中心是已知的,并且条形码零偏移是已知的,因此可以轻松计算先前参考的菌落的位置,因为它们被存储为到培养皿中心的距离和到条形码标签的角度偏移。如本文所述的自动化系统在第二系统(在该示例中为菌落拾取系统)或需要菌落位置信息的任何其他系统中不需要相机或计算机视觉系统。本示例中使用的角度偏移参考条形码标签,但它可以参考皿的任何独特基准特征或应用于皿,如上所述。
16.为了使用标签进行像素对准,标签的横向端部中的至少一个必须由使用远心镜头的成像设备清楚地捕获。由于标签长度和皿曲率已知,系统可以计算另一个标签端的位置,并且进而计算标签中心。平板上任何对象的坐标都可以通过了解平板中心和标签中心来确定。如上所述,本领域需要改进的成像系统,其部署远心镜头,该镜头提供对平板培养皿的监测能力,尤其是在几乎没有操作员干预的情况下。为了在将培养皿侧面上的标签用作对准基准的系统中部署远心镜头,使用镜子对于使远心镜头获得标签的图像是至关重要的。
17.在一个方面,本文描述的系统提供了一种用于捕获平板培养皿的图像的系统。该系统具有:i)具有相机的成像装置,该相机带有远心镜头,该远心镜头适用于捕获平板培养皿的图像;ii)镜子,其适于确保在由成像装置捕获的图像中可以清楚地看到平板培养皿侧面的标签;以及iii)至少一个照明系统,用于照亮平板培养皿以进行成像捕获。任选地,相对于其上放置有标签的平板培养皿放置镜子,使得在竖直方向上,镜子位于平板培养皿的底部之下。然而,横向地,镜子的至少一部分在平板培养皿的底部下方延伸(即,一部分延伸到由位于镜子上方的平板培养皿限定的周边中)。随后,镜子的至少一部分横向延伸超出位于镜子上方的平板培养皿的周边。
18.可选地,本文描述的图像捕获系统可以具有远心镜头模块,其将远心镜头和成像装置的相机相对于平板培养皿的位置对准和固定。远心镜头模块包括一个或多个支架和一个或多个板。
19.可选地,本文描述的图像捕获系统可以是集成的培养箱和图像捕获模块的一部分,该集成的培养箱和图像捕获模块调节培养箱空气并获得样本标本的高分辨率数字图像。可选地,图像捕获模块配备有接收从图像捕获模块传送来的平板培养皿的台。台配有扫描仪,扫描仪将扫描平板培养皿侧面上的标签。该台还配备有板缓冲器,其中一个是铰接的,并且从平板培养皿被接收在台中时的打开位置移动到扫描仪确定标签在相对于台的预定定向内时的关闭位置。该台的目的是确保接收到培养箱中的平板培养皿上的标签定向在平板与平板之间基本一致。通过将平板培养皿上的标签保持在可接受定向的预定范围内,更容易在成像设备中定位平板培养皿,使得标签与镜子对准。这也提供了平板内成像条件更好的均匀性。具体地,成像设备不提供平板表面的完全均匀的照明。通过在每次获得图像时将平板放置在相对于成像设备的相同位置,平板表面的每个区域或面积随时间经受相同的成像条件(即,对于区域“x”,成像条件“y”对于t
x
、t
x+1
、t
x+2
等时刻的图像是相同的)。
20.如果在没有某些预定定向的情况下将平板培养皿接收到成像设备中,则该定向基本上是随机的,并且成像设备将不得不花费时间和处理资源来将平板培养皿放置在标签将
与镜子对准的定向上。由于在这种情况下标签的位置可以在平板圆周上的任何位置,因此可能需要将平板培养皿旋转180度或更多,以便标签将与镜子对准。如果在相对于将在将平板培养皿接收到成像设备中时读取标签的传感器的预定范围内的标签定向将平板培养皿递送到成像设备中,则成像设备将花费更少的时间来在成像之前重新定向其上带有标签的平板培养皿。
21.进一步的优点将通过在此描述的系统的各个方面来实现,并且将从以下详细描述中变得明显。本文所述系统的优点之一是与用于平板繁殖的自动化平台集成,提供端到端自动化以将样本接种到平板培养基上、将样本划线 (streak)到培养基上以及繁殖经接种的培养基以促进目标微生物的生长。本系统是灵活的,并且还可以处理已经手动接种的平板介质。
附图说明
22.从详细说明和附图将更好地理解本文描述的系统,这些附图旨在说明而不是限制所描述的内容。
23.图1是使用具有平板培养皿的非远心镜头的相机拍摄的图像,所述平板培养皿在其侧面上具有条形码标签;
24.图2是使用具有平板培养皿的远心镜头的相机拍摄的图像,所述平板培养皿在其侧面上具有条形码标签;
25.图3是光束在本文描述的图像捕获系统中使用的凸面镜上的反射的示例性示意图;
26.图4是示出光束在本文描述的系统的凸面镜上的反射的示例性示意图,其中该镜放置在相邻的侧面和不同尺寸的底平板培养皿上;
27.图5是沿平板培养皿的侧面具有条形码标签的平板培养皿的示例性图像,使用本文描述的系统获得的图像具有带有远心镜头的相机和放置在平板培养皿侧面附近的弧形镜,标签被放置在平板培养皿侧面上并且镜子的至少一部分延伸到平板培养皿的底部下方;
28.图6是可与培养箱集成的本文所述系统的图像捕获模块的内部部分的透视图;
29.图7是本文描述的系统的图像捕获模块的后透视图;
30.图8是进入图7的图像捕获模块的平板培养皿的详细视图;
31.图9是本文描述的系统的图像捕获模块的侧透视图;
32.图10是图9所示的图像捕获模块的缓冲位置的详细视图;
33.图11是图9所示的图像捕获模块的扫描站的详细视图;
34.图12是图9中的图像捕获模块的分度站的详细视图;
35.图13是图9中的图像捕获模块的盖子操纵器的详细视图;
36.图14说明了被推进到分度站中的平板培养皿;
37.图15示出了玻璃板,在该玻璃板上通过分度盘放置了平板培养盘;
38.图16示出了分度盘;
39.图17图示了根据本文描述的系统的一个方面的分度盘机构;
40.图18是图6所示系统的一个方面的图像捕获系统的剖视图,其中截面 18-18平分
远心镜头;
41.图19是图18所示的图像捕获系统的成像室的详细视图;
42.图20是图19的一部分的放大图,其说明了成像站中的分度站;
43.图21是图像捕获系统的俯视图,图像捕获系统示出了平板培养皿和至少部分在平板培养皿下方的镜子;
44.图22图示了图6的成像设备的成像盘退出位置。
45.图23示出了根据一方面的离开本文所述的成像设备的平板培养皿;
46.图24示出了用于操作在此描述的系统的流程图,该流程图用于在玻璃培养皿支架上定位平板培养皿和相对于培养皿中心定位标签中心以将坐标分配给培养皿图像中的对象;
47.图25示出了根据标签的图像创建的极坐标图像和极坐标图像的信号;
48.图26a示出了标签相对于用于确定平板培养皿坐标系的平板培养皿中心的角度位置;
49.图26b将图26a中的几何分析投影到玻璃板上的平板培养皿的图像上。
50.图27图示了代表平板培养皿和平板培养皿的玻璃皿支架的掩蔽区域;
51.图28示出了平板培养皿边缘的极坐标图像;和
52.图29a和图29b分别图示了平板培养皿升降机和平板培养皿扫描升降机。
具体实施方式
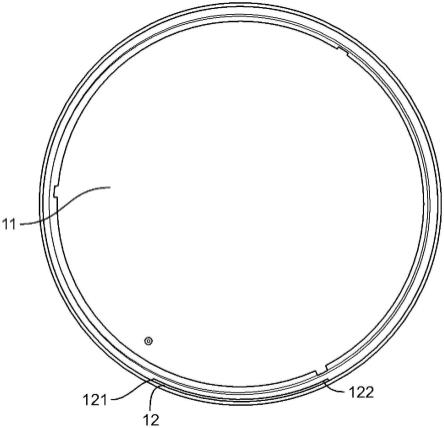
53.图1是在平板培养皿的外侧具有标签12的平板培养皿11的图像。可选地,标签12上具有条形码120。图像中没有明显的微生物生长。该图像是使用具有非远心镜头的相机获得的。这种镜头的一个非限制性示例包括例如标准的50-55mm f1.4摄影镜头。带有条形码120的标签12在图像上清晰可见。然而,参考图2,当使用具有远心镜头的相机获取同一平板培养皿11的图像时,具有条形码120的标签12在图像中不是很明显。
54.如上所述,标签用作基准以促进在不同时间拍摄的平板培养皿的图像之间的像素对准。标签可选地具有条形码信息。条形码可以包含识别平板培养皿、培养基类型、样本等的信息。标签的末端121、122必须在图像上清晰可见,以实现不同时间获得的图像之间的像素对准。
55.为了使成像设备获得有助于对准的关于标签的信息,镜子相对于平板培养皿定位以在平板培养皿的侧面反射标签。在某些方面,镜子被放置在平板培养皿的底部下方。镜子的至少一部分在平板培养皿下方横向延伸,使得镜子的该部分在由保持在镜子上方的平板培养皿限定的周边内。镜子的一部分延伸到超出由保持在镜子上方的平板培养皿限定的周边。可选地,镜子是凸面镜。
56.图3示出了光束在凸面镜13上反射的示例性示意图,例如本文所述的凸面镜。光线14基本上垂直14向下引导到凸面镜13上。当光线14撞击到镜子的球面13上时,根据众所周知的原理,它们被反射15,对于反射面,入射角等于反射角。
57.如上所述,对于图像对准,检测标签的边缘中的至少一个。此边缘检测用于相对于平板培养皿中心放置标签中心。标签中心是根据一些先验知识(即标签长度、镜面曲率和皿曲率)确定的。然后使用此信息来了解对象在平板培养皿中的相对位置。下次将平板培养皿
带入成像设备时,再次确定标签的至少一个边缘。根据标签中心相对于皿中心的信息,软件可以计算较早图像和较晚图像之间的偏移。使用该偏移,成像设备将第一图像中的像素与第二图像中的像素对准。
58.因为标签的中心用于对准,并且标签中心是通过检测标签边缘(或至少一个标签边缘)在镜子上的位置来确定的,所以需要标签边缘的高质量图像。因为来自高度抛光的镜面的反射可能会使标签边缘的图像失真或模糊,所以未被高度抛光的镜面减轻了一些失真和模糊。然而,如果寻找标签信息的图像,例如由标签携带的条形码信息或其他信息,则可以优选具有提供镜面反射的抛光镜面的高度抛光镜子。基于所寻找的标签信息,本领域技术人员可以选择所需类型的反射(即镜面反射或漫反射)。
59.平板培养皿可以有不同的尺寸,并且感兴趣的标签可以放置在平板培养皿上的不同位置。本领域的普通技术人员能够确定镜子的尺寸、镜子的弯曲度以及镜子在每个这些平板培养皿的附近和下方的放置,这些放置是可接受的以提供针对给定尺寸的平板培养皿以及感兴趣的标签在平板培养皿上的位置和大小的标签的反射。
60.图4图示了示出光束在凸面镜23上的反射的示例性示意图,其中该镜子位于不同尺寸21a-d的平板培养皿下方(图4中仅图示了每个平板培养皿的一部分)。如图4所示,镜子23的一部分横向延伸到由覆盖镜子23的平板培养皿21a-d限定的周边28中。镜子23的另一部分横向位于该周边之外。从示意图中可以看出,镜子23的位置和尺寸配置为配合不同直径和不同高度的平板培养皿以提供标签在平板培养皿上的反射(不同的皿配置为21a-d)。镜子23放置在透明(例如,玻璃、有机玻璃)培养皿窗口26上方,该窗口由板支架27固定就位。尽管此处将培养皿窗口26描述为玻璃,但本领域技术人员将理解,也可以使用其他透明材料(例如,丙烯酸玻璃、有机玻璃等),前提是此类材料足够透明并且不反射。平板培养皿21a-d通过分度盘(稍后详细描述)保持在玻璃板26上方。玻璃板26允许平板培养皿21a-d从平板培养皿21a-d下方被照亮。如图所示,玻璃板26延伸超过平板培养皿21a-d 的横向界限。玻璃板由不透明的板保持器27支撑,该板保持器围绕玻璃板26 的周边。取决于平板培养皿的尺寸,这种差异由不同的培养皿轮廓21a、21b、 21c和21d来说明,镜子23的位置可以被配置为反射具有不同直径的平板培养皿侧面上的标签的图像,或者任选地被调整以反射具有不同直径的平板培养皿21a-d上的这种标签的图像。无论哪种方式,平板培养皿侧面的反射都会被远心镜头捕获,远心镜头基本上垂直地接收来自被成像物体的光。具体地,平板培养皿21a具有第一高度和第一直径,平板培养皿21b具有比21a 更大的直径但具有大致相同的高度,并且平板培养皿21c和21d具有更大的高度但直径大于21a的直径但是小于21b的直径。由镜子23反射的平板培养皿21a、21b和21c的侧面的图像分别由25a和25b表示。由24a、24b和 24c表示的各个标签反射被导向远心镜头并由远心镜头接收,从而允许远心镜头捕获在平板培养皿21a、21b和21c的侧面上的标签(未示出)的图像。如上所述,使用该标签信息来影响在不同时间拍摄的具有中间繁殖步骤的平板培养皿的两个图像之间的平板培养皿的逐像素图像对准。
61.图5是具有沿着平板培养皿11的侧面的标签12的平板培养皿11的示例性图像。标签12在其上具有条形码120。然而,如上所述,如果标签12用于图像对准,则不需要条形码120位于标签12上。标签12可以放置在平板培养皿11的内表面上或平板培养皿11的外表面上。
62.根据本文所述的一个方面,使用具有相机的系统获得图像,该相机具有远心镜头和弧形镜13,弧形镜13放置在平板培养皿下方及其侧面。成像设备定向平板培养皿11,使得标签12与镜子13对准。如从图5中的图像可见,带有条形码120的标签12清晰可见,其在镜子13中的反射也是如此。这确保了标签12的图像可以被具有远心镜头的成像设备捕获并用于在中间繁殖步骤中逐像素对准平板培养皿11的第一图像与在稍后时间点拍摄的平板培养皿的第二图像。
63.平板培养皿放置在玻璃板126上方。平板培养皿11的获取图像的坐标空间通过标记检测确定。具体地,确定标签12的两个横向端部128、129(图 26a中也是312、314)沿着皿轮廓的精确位置。由此确定标签中心。使用培养皿11的中心作为原点将这些位置捕获为角坐标。这些标签角坐标和培养皿中心应允许在参考板上精确定位图像上标记的菌落,并且稍后由identifa或任何其他手动或自动系统拾取。identifa是由bd kiestra
tm
实验室自动化解决方案(becton dickinson and company)(bd)提供的系统。皿轮廓和皿中心在皿检测之前是未知的。
64.图6是本文描述的与培养箱集成的图像捕获模块200的一个方面的内部部分的透视图。特别地,图6示出了从繁殖系统通过成像单元并返回到培养箱的传送器240。如图6所示,平板培养皿242沿传送器系统240行进。当平板培养皿242到达指定位置时,盖操纵器250将从平板培养皿242移除盖子。标签然后由读取器(即,条形码扫描仪或rfid阅读器)249读取,同时通过扫描升降机旋转板。然后将平板培养皿242移动到分度盘251上。通过分度盘251的旋转将平板培养皿242推进到成像站253(图19)中。分度盘251 将平板培养皿移动到图像捕获单元下方的位置,这在美国申请公开号 2015/0299639a1中有详细描述。成像后,平板培养皿被旋转到位置260,在此将盖子放回培养皿上。然后将平板培养皿242卸载回到传送器240,在那里它被传送回卸载站270。卸载站270位于安装有图像捕获模块200的培养箱柜 (未示出)中。卸载站270具有扫描仪259和分度盘(未示出)。扫描仪259 确定标签在平板培养皿上的位置,并且另一个扫描升降机244'(图23)旋转平板培养皿242,使得标签相对于机器人(未示出)在预定定向内,机器人将平板培养皿从卸载站卸载。
65.在标签相对于卸载和装载机器人在平板培养皿242上的定向大致相同的情况下,平板培养皿242在该平板培养皿242被置于分度盘251中时潜在地需要被扫描升降机244’旋转以确保标签将与成像站253(图20)中的镜子33对准的旋转程度被减小。一旦传感器确定标签的位置,软件就会控制平板培养皿的旋转,以相对于机器人将标签放置在所需的定向。上面描述了这种方法提供的效率。
66.图7是图6所示的图像捕获模块的后透视图。图7图示了入口子系统275,其中平板培养皿242进入276和离开277图像捕获模块。用于培养皿入口276 的设备在图8中详细说明。设备确认已将平板培养皿242传送到培养皿升降机244的吸盘243上。吸盘243由固定平台248支撑。将平板培养皿242放置在培养皿升降机244上由传感器245确认。此处描述的升降机244与扫描升降机244'/244”的区别在于升降机244上下移动平板培养皿,而扫描升降机 244'/244”上下移动平板培养皿242并且还旋转平板培养皿。升降机244在图 29a中示出,并且扫描升降机244'/244”显示在图29b中。图29a中的升降机具有非旋转平台248,并且因此没有旋转机构,只有升降机构。图29b中的扫描升降机构被示出为具有由扫描升降机248'的旋转和升降机构控制的旋转平台248”。
67.图9是图6所示的图像捕获模块的侧透视图。图9示出了缓冲位置246,其中培养皿(未示出以便可以看到缓冲位置)在分度之前被保持。缓冲位置 246保持平板培养皿,直到图像捕获模块准备好接收下一个培养皿用于成像。图9还示出了放置在扫描升降机244'和分度盘251上的壳体247。
68.图10是具有扫描仪249的扫描站239的详细视图,其中培养皿在从图9 中的缓冲位置246释放之后被移动。图9中的壳体247在图10中被移除。在这个位置还有培养皿扫描升降机244'。培养皿扫描升降机具有吸盘243'和传感器245。吸盘243'位于旋转平台248'上。扫描站239也是盖操纵器250所在的位置。图10所示的平板培养皿242具有从其移除的盖子255。图11示出了盖操纵器250,其具有臂278,臂278上带有吸盘252,该吸盘252将从平板培养皿242提起培养皿盖子255。
69.参考图12,培养皿盖子255已经从平板培养皿242上抬起。扫描升降机 244'旋转平板培养皿,使得扫描仪249可以读取平板培养皿242侧面上的标签。由于培养皿当被引入图像捕获系统30(图18)时已经被预先定向,因此平板培养皿242仅旋转约90度以便在扫描仪249的视野内。当读取条形码时,扫描仪向系统控制器发送信号,该信号启动偏移计时器。在计时器持续时间中,条形码将与成像位置的镜子对准放置(如下所述)。当计时器超时时,培养皿升降机将培养皿降低回到传送器240上并且允许将平板培养皿242推进到下一个位置。
70.在获得平板的图像的同时,培养皿盖子255保持离开平板培养皿242。参考图13,盖操纵器250将盖子移动到具有吸盘252'的第二盖操纵器250',在获得培养皿的图像后,当培养皿移动到位以接收培养皿盖子255时,该吸盘 252'接受培养皿盖子255以便放置回到平板培养皿242上。一方面,盖操纵器 250'是具有三个不同垂直位置的圆柱体。圆柱体具有连接到其上的吸盘252'。圆柱体从其上部位置开始。当培养皿盖子255被盖操纵器250推进到位时,圆柱形下降到吸盘252'接触培养皿盖子255的第二位置。圆柱形盖子然后前进到第三下降位置,在那里它释放回到平板培养皿242上。
71.参考图14,在扫描仪249扫描平板培养皿242之后,平板培养皿242被传送器240推进到分度盘251。分度盘在x-y-z坐标空间中固定平板培养皿242 的位置。这样,每次对板进行成像时,板都具有相似的位置和定向。该板由三个缓冲器280'280”和280”'倾斜。缓冲器280'是完全固定的,缓冲器280”固定在轴承(未显示)上,这将允许板安放在三个缓冲器之间以获得最大的抓握力。较小的缓冲器280”'连接到铰接臂(翻转器)281,该铰接臂在培养平板 242上闭合以将其固定到位。还参照图15描述了该结构。
72.图16示出了整个分度盘251。当板对准并且成像位置准备好接收平板培养皿时,分度盘251将旋转90
°
以将板移动到成像位置。一方面,分度盘具有用于提供间歇旋转运动的内部机构(例如,日内瓦机构)。图16所示的机构有两个轨道。一个轨道283用于推进分度盘251。第二轨道284用于在其将平板培养皿推进90
°
之后锁定机构。
73.参照图17,图16中所示的分度盘251被固定到步进电机287的臂286 中的轴承285驱动。分度盘251具有四个分度位置并且这些位置通过锁288 固定。在一方面,步进电机旋转与分度站旋转的比率为4比1(即,步进电机每转一整圈,分度站前进90
°
。
74.图18是本文描述的系统的一个方面的图像捕获系统30的横截面图,其中该横截面沿图6中的线18-18将远心镜头/相机组件40二等分。该系统包括成像室42和支撑区域38,在成像室42中接收平板培养皿,支撑区域38在成像期间支撑平板培养皿。
75.图19是图18所示设备的成像室42的放大图。在所示的方面中,存在三个光源:顶部光源(50a)、掠光(grazing)光源(50b)和底部(50c)光源。如图所示的每个光源具有十二个呈圆形配置的led灯条(图19的剖视图中仅示出了该圆圈的一部分)。在顶部和掠光灯(50a、50b)下,黑色背景位于平板培养皿(未显示)下方。为了使底部光源照亮平板培养皿,该背景被移出成像室42。为每个照明源安装了三个光漫射器:顶部(51a)、掠光(51b) 和底部(51c)。
76.用于掠光源灯条的漫射器51b附接到升降机构。如图所示,通过分度盘 251的升降机构51d,掠光漫射器51b被提升离开路线以将平板培养皿移入和移出成像位置。
77.参考图20,镜子33放置在透明壳体45上方,其允许来自位于透明壳体 45下方的光源50c的照明。可移动黑色背景46放置在透明壳体45下方。
78.图20是在图像捕获系统30的成像站253中接收平板培养皿(未示出) 的结构的俯视透视图。图20还示出了与分度盘279放置平板培养皿的位置相邻的镜子33。如图所示,镜子33被放置为使得整个镜子33位于平板培养皿的底部下方。横向地,镜子的至少一部分延伸到由平板培养皿限定的周边中。然而,如图4所示,大部分镜子都在由平板培养皿限定的周边之外。
79.参考图21,平板培养皿242由分度盘279承载。分度盘279提供有平板缓冲器280’、280”和280
”’
。缓冲器280”'安装在铰接臂281上,当分度盘279 从传送器240接收平板培养皿242时,该铰接臂处于打开位置。在扫描升降机244'定向平板培养皿242使得标签32在预定范围内并将标签释放到分度盘之后,铰接臂281移动到关闭位置以将平板培养皿242保持在适当位置,以便当分度盘279将平板培养皿242推进到成像站253时,标签与镜子33对准。掠光漫射器51b也在图21中示出。
80.图22示出了平板培养皿242如何前进到分度盘退出位置。如上所述,分度盘的上游凹槽包含下一个平板培养皿,使得下一个板的成像的开始几乎可以与前一个平板培养皿从成像站的退出无缝衔接。在分度盘251的退出位置,指状机构87打开翻板281,从而将平板培养皿242传送到挡块88,在那里保持平板培养皿,使得用于平板培养皿242的盖子255可以使用盖操纵器250' 被放置在平板培养皿上。当真空传感器(未示出)确认盖子从吸盘252'上释放时,挡块88下降并且平板培养皿被释放。
81.图23图示了平板培养皿242返回到入口子系统275,其中平板培养皿242 进入276并且离开277图像捕获模块200。该板被挡块90停止。吸盘243'固定板到扫描升降机244”。确认真空后,扫描升降机244”升起。旋转平板培养皿242并且通过扫描仪259扫描条形码以确认正确的板。此外,使用条形码和偏移设置来定向平板培养皿242。这样,如果平板培养皿242被称为新的循环,则定向被预定义以获得最佳吞吐量。
82.可选地,标签检测使用由系统存储的某些信息(在本文中称为先验(机械)知识。)此类信息包括但不限于从系统校准获得的信息或系统组件的已知机械常数。系统存储的该信息包括图15所示的玻璃板300的表面积。当从底部照射玻璃板时,玻璃板区域的可见部分近似于圆形319。
83.存储的信息还包括镜像弧描述。图15示出了通过底部照明(透射光)看到的其上没有平板培养皿的玻璃板区域300。在校准期间,玻璃板区域300由具有中心310的圆形319近似和限定。圆形的中心和半径也是近似的。在校准期间识别弧形镜313。弧形镜313的两端位
置332、334相对于玻璃板区域 300被识别。弧形镜313的内径略小于玻璃板319的直径,而弧形镜313的外径大于支撑板319的直径。玻璃板300和弧形镜313具有共同的中心。角度θ是弧形镜313对着的角度。
84.如上所述,分度盘251使用缓冲器280'、280”和280”'以及鳍状件281固定培养皿相对于成像设备的位置。
85.镜像弧由在上述中心310处相交的线331和332界定。角度θ用于定位镜子端部相对于支撑中心310的角度。支架319的周边根据支架中心310和支架的半径计算。
86.为了捕获标签的图像,将标签和镜子对准。平板培养皿的定向是通过检测标签的边缘并旋转平板培养皿来确定的,使得标签放置与镜子放置对准,确保标签被镜子反射。参考图6,通过传送器系统240将平板培养皿11传送到成像设备中。当平板培养皿11被运送经过扫描仪249时,平板培养皿11 上的标签(未示出)被扫描。感测标签放置允许分度盘251在某位置接收带有标签的平板培养皿,当平板培养皿11前进到成像位置时,该位置将允许标签与镜子13对准。成像位置示于图19中。
87.如前所述,标签可用于将平板培养皿的当前图像与平板培养皿的先前图像定向和对准。首先通过将第一幅图像中的皿中心与第二图像中的皿中心对准来转换这两个图像。然后使用由标签边缘和皿中心定义的角度来相对于一图像旋转另一图像。使用标签的图像作为基准信息有利于随着时间的推移在同一平板培养皿的多个图像之间对准像素数据。
88.如本文中详细描述的,系统必须检测培养皿以获得理解平板培养皿定向所需的信息,不仅针对当前图像,而且针对过去和未来的图像,使得在不同时间拍摄的图像可以被对准。通过这种方式,可以检测到从图像到图像变化的像素。确定板和标签中心的系统操作在图24中描述。
89.一旦从培养皿检测中确定了培养皿中心,就可以将所述图像与相同平板培养皿的先前图像进行比较,并且确定相对于平板培养皿的先前定向的成像设备中平板培养皿的定向。一旦两个图像使用平移相对于它们的皿中心被对准,则使用相对于各自标签中心的旋转来对准图像(即,通过将第一图像中的标签中心与第二图像中的皿中心对准)。
90.可选地,本文描述的图像捕获系统可以具有远心镜头模块,该远心镜头模块将远心镜头和成像装置的相机的位置相对于平板培养皿对准和固定。远心镜头模块包括一个或多个托架和一个或多个板。可选地,可以使用球窝接头来倾斜带相机的远心镜头。这允许远心镜头的轴线和相机视图被设置为垂直于板表面(或如果需要,可以设置为其他角度)。
91.可选地,本文描述的图像捕获系统可以是与培养箱集成的模块。美国申请公开no.2015/0299639 a1(其全部内容通过引用并入本文)公开了这样一种集成的培养箱和图像捕获模块,其调节培养箱空气并获得样本标本的高分辨率数字图像。在这种情况下,图像捕获系统可以具有模块的形式,该模块是紧邻用于生长和维持微生物和细胞培养物的样本培养箱的封闭单元。这使得样本能够从培养箱直接传输到图像捕获模块的环境中,而无需通过一个或多个中间环境进行传输。样本容器,例如包含平板培养物的皿,通过端口或端口的入口门被传送到图像捕获模块中。此后,可以移除样本容器的盖子,使得图像捕获单元可以对样本容器进行电子成像(例如,数字照片)。在样本容器已经被成像之后可以更换盖子,并且样本容器可以通过相同的门被传送回来,或者可选地通过端口的出口门,以便放置回到受控培养箱环境中以继续繁殖。如美国申请公开no.2015/0299639 a1所述,将图像捕获
模块直接与培养箱相邻减少了在样本容器被成像时样本容器暴露于外部环境(具有其缺乏精确控制的温度和空气以及潜在的污染物)的时间量。由于图像捕获模块是封闭的,因此它充当实验室空气和培养箱空气之间的屏障,从而减少了实验室空气进入培养箱和样本容器从培养箱进入并通过门返回到培养箱的程度。
92.如上所述,如现有技术中所述获得平板培养物的图像。这些图像是使用不同曝光时间获得的。确定曝光时间以在图像的感兴趣区域中提供目标强度范围。在操作本文描述的系统的一个实例中,仅使用侧面照明生成彩色图像。控制图像的曝光时间,使得从镜像弧度得到的图像的强度范围在目标强度范围内。一旦得到目标强度范围的镜图像,则通过保持使用图像的单色通道获得的图像来得到灰度图像。通常,最强烈的颜色通道用于生成灰度图像。
93.参考图25,其图示了具有标签410的反射的镜子400的线性图像。为了获得沿镜子的角轮廓,使用限定玻璃板的周边的圆形的中心310来限定极坐标系的原点。如图26a所示,中心310也是镜子313的弧的中心。这里,感兴趣区域是镜子313(图26a)。使用上述关于镜像弧的先验知识,创建了镜子的极坐标图像和标签在镜子中的位置。
94.图25还图示了图25中所示的二维图像的一维信号。可以以本领域技术人员熟知的多种方式获得该一维图像。例如,图25的极坐标图像中的列的平均值可以用于图25图像中所有像素列的归约运算,例如求和、最大值或最小值。如图25所示,镜子的二维极坐标图像沿径向尺寸缩小到镜子的一维角轮廓和标签相对于镜子的端部的位置。通常,使用极坐标图像的所有列的平均值来生成角度轮廓。
95.一旦知道镜子的角轮廓,就检测镜子上标签的反射或图像。如上面参照图10所描述的,标签在镜子上的反射由其横向端部定界。在角度方面,标签位于θ
start
和θ
end
之间,如图25所示,作为沿着角轮廓的开始角度301和结束角度302。
96.为了检测镜子上的标记,ω被用作镜像弧上所有可能的角度对(θ
start
,θ
end
) 的集合。该集合是根据一个(或多个)预期标签的物理长度填充的,并规定了标签长度的变化。虽然这允许标签略长于指定长度,但它主要允许标签略短于指定长度。当从标签长度中减去公差时,系统可以识别皿壁上弯曲标签的坐标(即端部),该弯曲标签使得镜子上的标签投影比镜子的实际长度短。为了识别仅在镜像弧上部分反射的标签端部,该集合ω还可以包括间隔小于等价标签长度(最多比标签长度小25%)的角度对。在这种情况下,角度之一对应于两个镜子端部之一,因为在这些示例中,标签的一端延伸超出镜子的边缘。
97.沿着所述轮廓检测标签端部在于最大化得分函数:
[0098][0099]
得分函数是如下基于边缘的术语和基于区域的术语的组合:
[0100]slabel
=αs
edge
+βs
region
,
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0101]
其中α和β是权重。通过使用角度强度分布上的强度梯度(αs
edge
),第一项有利于强度的局部强变化(图25中所示的标签端部301、302)。第二(βs
region
) 使用区域统计信息来识别图像信息中的标签区域(即共享平均强度的区域,该平均强度相对于轮廓的其余部分较大)。第一项使用已知的标签长度并提供测量的准确性,因为它清楚地指示了标签端部。第一项对θ
start
和θ
end
处的强度梯度求和,因此由已知标签长度隔开,这是上述先验知识的一部
分。然而,第一项对噪声更敏感,(例如,由于条形码本身导致的标签反射内的强峰,这可以通过图25中的信号的沿标签长度的强度变化看出)。因此,第二项通过验证标签跨越多个标签端部(或一个标签端部和镜子的端部)之间的距离来增加稳健性。换句话说,第二项确保沿标签长度的强度变化不会被解释为标签的端部。
[0102]
基于区域的贡献是在标签内部和外部的镜像弧区域之间强度i的“迈克尔逊”对比度。这由以下定义:
[0103][0104]
其中表示该区域中的平均强度,例如,其中n是θ
start
和θ
end
之间的点数。
[0105]
基于边缘的项是在标签两端沿轮廓的梯度幅值的贡献。这由以下关系定义:
[0106][0107]
其中表示强度i在角度点θ处的梯度,而m是用于生成上述图像的最大强度值。例如,对于8位,最大强度m为255。然而,如果角度点θ的梯度幅度太靠近轮廓边界(即,靠近镜子端部),则不考虑这些角度点。当角度对描述的标签在镜像弧内仅部分可见(即标签的整个图像不在镜子中)时,这种情况最常发生(但并非总是如此)。这也可能发生在标签被完全反射但具有一个非常靠近镜子的端部的侧边缘时。因此,最大的贡献来自于在θ
start
从暗到亮的过渡和在θ
end
向后(即从亮到暗)的过渡。请注意,s
edge
和s
region
期望最小目标以将之间的发现区域视为真实标签。
[0108]
参照图26a,最终从推导出培养皿轮廓309上的标签端部位置 312、314(图5中的128,129)作为平板培养皿圆形309和通过镜子上的标签端部位置301、302和玻璃板区域中心310的线之间的交点。例如,在皿检测之后,当确定皿中心时,皿中心317和沿着培养皿轮廓309的标签中心316 的角度位置(相对于皿中心317)用于定义参考坐标系以精确识别图像对象(例如菌落)的位置。如图26a所示,使用标签作为基准,可以相对于基准分配对象的坐标(r,θ)。下次将板接收到成像设备中时,设备将使用新图像中的标签和板中心来识别对象。图像捕获在wo2015/114121中有详细描述,其通过引用并入本文。
[0109]
图26b是通过底部照明获得的培养皿的实际图像。覆盖在该图像上的是镜子端部332、334、标签端部312、314、标签中心316、玻璃板中心310和平板培养皿中心317。中心310和317未完全对准的事实是很明显的。如本文别处所述,必须执行培养皿检测过程以确定培养皿中心317、培养皿轮廓309 等。
[0110]
该系统在具有远心镜头的成像装置的图像场中检测皿本身。皿检测导致确定皿中心317和皿轮廓309。皿轮廓和皿中心然后用于定位标签的端部。然后将皿中心用作用于图像对准和对象检测的坐标系的原点。坐标系也是由标签中心确定的(其由标签在镜子中的反射确定)。如上所述,平板培养皿(或其他被成像的容器)放置在更大的玻璃板300上,玻璃板支架(图5中的127) 沿平板培养皿的圆周将其保持在该更大的玻璃板300上。当获取本文所述的平板培养皿的图像时,必须尽可能精确地定义最外部的培养皿边缘,因为上述整个坐标系的完整性取决于将坐标系中的准确坐标分配给盘中心。如上所述,尽管可能因操作
培养皿而导致培养皿变形(例如,推动培养皿壁会导致轻微压痕),但培养皿的外周边近似为圆形。
[0111]
板的所有后续自动检查(例如生长检测、菌落计数或识别)都限于该限定的圆形区域。如上所述,该区域的中心是参考板的原点(即上述坐标系的原点)。坐标系用于精确对准在不同时间拍摄的图像的像素,并用于定位在图像上标记的菌落并用于稍后被拾取(通过诸如上述identifa的系统)。
[0112]
与上述镜子上的标签检测一样,皿周边的定义需要特定的先验(机械) 知识。具体而言,需要了解被描述为圆形的玻璃板区域300。玻璃板具有不透明的玻璃板支架(127),但仅玻璃板的被照亮的部分(图15)被使用并近似为圆形。底部照明用于定义玻璃板区域的可见部分的界限,该界限近似为图 15中的319。
[0113]
参考图27,330和340分别表示培养皿(330)下方和延伸超出培养皿(340) 的玻璃板区域的罩。内罩330是与玻璃板区域319的中心共享其中心的盘(图15)。使用底部照明获得培养皿的图像。感兴趣区域330的尺寸适合于限定系统可接受的任何直径的培养皿的圆形内。感兴趣区域340是一个环,该环将总是在由系统接受的任何平板培养皿的直径之外。外部感兴趣区域340用于测量白色统计量,白色统计量描述仅通过玻璃板区域(而不是通过玻璃板区域和平板两者)透射的底部照明强度。相反,在玻璃板区域圆形340之外(超出)测量黑色统计量。这是支撑板支架127的不透明部分。
[0114]
外罩340是环340,其也与玻璃板区域319的中心同心。外罩的外径等于玻璃板区域319的外径。外罩340的内径尺寸在圆形之外,该圆形定义了系统可接受的任何直径的平板培养皿。
[0115]
如上所述,根据本文先前描述的图像采集,使用常规图像捕获获得平板培养皿的彩色图像。获得图像,该图像提供在由玻璃板限定的圆形319内的大强度范围。保留罩区域330和340之间具有最高对比度的颜色通道并将该颜色通道用于生成灰度图像。如果罩区域330和罩区域340之间的对比度低于使用吸收最少皿(例如,没有任何介质的空皿)凭经验调整的阈值,则这表明系统中没有皿。
[0116]
图24是使用板中心检测和标签中心检测两者来定义坐标系的流程图,该坐标系可用于对准在不同时间获得的相同平板培养皿的图像。如上所述,使用先验知识(步骤410),该先验知识是通过构造得知的或在校准期间发现的,包括玻璃板区域圆形(步骤410)和镜子的边界(步骤415)。在步骤420中,应用皿检测来确定在系统中界定皿的圆形(309)的外周边。在步骤430中,根据步骤420中的皿检测确定板外圆形。
[0117]
在步骤416中,获得镜子的图像并且从该图像检测镜子上的标签端部位置301、302。因此,步骤417中的标签端部位置在步骤416中确定。在步骤 418中,镜子上的标签端部位置(图26a中的301、302)然后被投影回皿外周边上(步骤430),导致板周边上的标签端部位置(步骤419中的数据,它们是图26a中的312、314)。步骤430确定图26a中的309。由此,如前所述,从128、129获得沿着皿外周边圆形309的标签316的中心。
[0118]
极坐标的参考系是使用在步骤440中确定的皿周边中心和标签中心位置来定义的。这在图26a和图26b中示出。该参考系用于对准在不同时间拍摄的图像的像素,并用于定位图像上标记的菌落,并且用于稍后被拾取。
[0119]
培养皿周边圆形309定义了感兴趣区域(roi),所有随后的板的自动成像和检测
(例如,生长检测、菌落计数或识别)都被限制到该区域。
[0120]
计算罩区域340内的中值强度值(对应于严格不透明区域的340的零值不包括在中值计算中)。如上所述,罩区域340是感兴趣的平板区域之外的区域,其包括玻璃板未被平板覆盖的那些部分。获得白色统计量,该白色统计量是该罩区域内大于中值强度值的所有强度值的众数。此白色统计量可用于确定平板培养皿的周边,因为玻璃板中的强度在培养皿边缘和支架之间的交界面处转变为不同的强度。
[0121]
参考图28,示出了从玻璃皿支架的不透明外部延伸到平板培养皿内部的极坐标图像。极坐标系的原点是定义玻璃板周边的圆形的中心310。图27中罩区域330的内部外边界小于系统接受的最小平板培养皿,并且玻璃板周边 319是图27中罩区域340的外部外边界。因此,图28是从图27中的图像获得的极坐标图像,即通过底部照明。半径的范围是从玻璃板319的外周边到平板周边309内的半径,并且基于系统接受的最小平板培养皿的半径,以确保将达到部署在系统中的任何平板培养皿的内部。极坐标图像的半径范围被近似为包括围绕玻璃板圆形319外部的不透明区域和平板培养皿周边309内部的区域的平板/支架的整个圆周的半径。因为图28为极坐标图像,所以从玻璃板区域圆形外部到玻璃板内的径向尺寸是针对图像中的每一列像素的。当平板培养皿和玻璃皿支架的中心没有完全对准时,极坐标图像反映了平板培养皿的周边和玻璃板支架的周边之间的距离变化。如上所述,板半径由系统接受的板半径范围确定。白色统计量是针对区域340的。黑色统计量321是超出玻璃板面积的强度平均值(即,半径严格大于玻璃板面积圆形1)。
[0122]
为了检测平板培养皿,首先确定基于黑白统计量的从黑色(321)到白色 (323)强度的强烈转变。如上所述,白色统计量是在罩区域340内计算的并且被设计为总是在玻璃板的周边之内但在平板培养皿的周边之外。这些像素表示玻璃皿支撑周边322。该强度转变需要大于白色统计量与黑色统计量(它们是平均值)的差的预定阈值百分比(例如70%)。
[0123]
然后通过识别列中的像素来确定区域323的宽度,该像素的强度保持严格大于白色统计量的百分比(与最小平板边缘吸收有关并且凭经验调整为 70%)。从玻璃板区域到平板培养皿周边的这种过渡最终被细化为从白色到黑色的梯度最大的地方324。从所有这些过渡324中,培养皿的外周边近似为圆形309。
[0124]
虽然本文描述的系统已经参考特定示例进行了描述,但是应当理解,这些示例仅仅是对所描述和要求保护的内容的原理和应用的说明。因此应当理解,在不脱离所附权利要求的精神和范围的情况下,可以对说明性示例进行这些和各种其他省略、添加和许多修改,并且可以设计其他布置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1