一种照明救援系统及其使用方法与流程
1.本发明涉及一种照明救援系统及其使用方法,属于消防救援车辆照明技术领域。
背景技术:
2.随着社会经济的日益进步和人们生活水平的不断提高,消防车不仅应用于火灾救援,还要应用到各类抢险救援工作当中。为适应多种使用环境如夜间或阴霾雨雪之类的自然光线昏暗的天气,消防救援车辆上一般会设置有照明装置,如申请号为cn201811496071.x的专利提出了一种多功能消防车,在车体上设置有升降照明系统;而这种设置在消防救援车上的照明装置往往难以甚至根本无法看清具体救援状况,从而耽误十分宝贵的楼层救援时间;申请号为cn201910280054.0与cn202020048973.3的专利则将照明装置设置于云梯或伸缩吊臂的前端使其能够对所需救援的位置进行针对性的照明,但是这种设置方式仍然存在着照射角度存在死角、无法根据周围的环境浓度调整灯光强度的技术问题;此外,现有的消防救援车辆往往功能较为单一且智能性不足,因此,亟需设计一种智能程度高且照明范围广的照明救援系统。
技术实现要素:
3.为克服上述现有技术的不足,本发明提供了一种照明救援系统,包括强光照明子系统、辅助照明子系统、传感系统和控制系统。
4.强光照明子系统设置两套,一套设置于消防救援车辆的中部,一套设置于车辆尾部,每套强光照明子系统包括气缸、旋转云台、电缆线、第一灯头。其中气缸具有升降功能,通过气管与气泵连接,可实现灯头的升降功能;灯头、云台通过电缆线与控制系统连接,通过电缆线供电并发送控制信号,云台通过旋转轴承设置于气缸的顶端,通过旋转云台控制第一灯头的转向,控制照明角度,实现照明搜索功能。
5.第一灯头设置有多个并分别固定在云台的两侧,可以随云台一起转动。光源采用多颗大功率led,均布在led铝基板上,led铝基板直接贴在灯具外壳上,导热快,散热效果好。灯具整体温升低,保证led光源的寿命,可满足灯具的长期可靠照明需求。聚光灯头采用出光角为6.7度的小角度透镜通过精准配光设计实现远距离照明,配光设计满足100米处照度大于700lx。灯具采用led光源熄灭后可马上进行二次启动,远小于技术要求规定的二次启动时间不大于2分钟的要求。灯具外壳采用锻造铝合金,一体成型,外形为长方形。
6.云台可实现第一灯头的俯仰和左右转动,具备体积小,重量轻等特点,设计重量≤20kg,转速32
°
/s,云台可实现水平0
°
~360
°
,垂直-45
°
~+45
°
转动,满足技术要求规定的“重量不大于30kg,水平旋转速度:不小于30度/秒;水平旋转角度:0度~360度连续旋转;垂直旋转范围:-45度~+45度”的要求。
7.辅助照明子系统包括固定座、旋转部分、灯主体、连接件、第二灯头、透镜灯罩、灯头散热器以及电机。
8.固定座上端与旋转部分连接,底部提供与消防救援车的安装接口。灯主体内置电
机,灯主体可绕固定座水平360
°
旋转,同时可控制第二灯头绕着灯主体竖直翻转180
°
。连接件把第二灯头与灯主体通过电机连接在一起,透镜灯罩提供外壳防护和配光设计,灯头散热器与透镜灯罩一起为led提供外壳防护和散热,外壳防护等级ip66。灯具额定电压设计48v。灯光车辅助照明装置采用光源led光源,选用cree xpg3高光效灯珠,灯珠光效可达190lm/w;方案采用24颗灯珠,采用12串2并设计方式,额定电压36v,光源功率100w,满足技术要求规定的“光源功率不大于120瓦”的要求;按照190lm/w计算光源总光通量为19000lm,透镜灯罩中透镜角度为6度,经模拟100米处中心照度≥45lx。设计满足技术要求规定的“光源功率不大于120瓦,100米中心照度不小于40勒克斯,光源类型为led光源”的要求。
9.旋转部分包括水平旋转结构和竖直翻转结构,水平旋转结构主要组成部分为:水平旋转电机、水平旋转限位开关、大齿轮,其中大齿轮与灯主体通过螺钉连接为一体,当水平旋转电机带动大齿轮旋转时,灯主体绕着底座水平旋转,水平旋转限位开关可控制灯主体旋转最大角度为360
°
。竖直翻转结构主要组成部分为:竖直翻转电机、竖直翻转限位开关、连接件。其中连接件将第二灯头与内置竖直翻转电机进行连接,当竖直翻转电机旋转时带动第二灯头绕着灯主体旋转,竖直翻转限位开关可控制第二灯头翻转角度为0-180
°
。
10.辅助照明子系统一共有11套,分成5组,按如下定义:前向灯:装在车前顶面,朝向车行进方向的4套辅助照明子系统;后向灯:装在车后顶面,朝向车后方的4套辅助照明子系统;左侧灯:装在车中顶面,朝向左侧的1套辅助照明子系统;右侧灯:装在车顶右面,朝向右侧的1套辅助照明子系统;救援灯:1套,装在伸缩臂或云梯的前端的辅助照明子系统。
11.传感系统包括光亮度检测传感器模块及有害气体检测传感器模块。光亮度检测模块有多个,设置于车体四周,对其对应区域进行光亮度检测,并向控制系统提供光亮度信息;有害气体检测模块包括多个敏感单元形成传感器阵列,设置于辅助照明子系统的固定座上,用于检测环境气体中是否存在co、h2s、氮氧化物、二恶英等有害气体。
12.控制系统包括操作控制箱、遥控器、线控器,控制箱内设有开关电源、驱动电源、控制板、电磁阀、无线通信模块。控制箱负责控制气缸的升降、云台的转动、辅助照明子系统的转动以及照明的开关;遥控器通过无线控制灯具的升降、旋转、开关灯和调光;线控器通过线缆控制灯具的升降、旋转、开关灯和调光。控制装置采用知名厂家的开关电源,具有电压稳定,散热性能好,寿命长等特点,同时采用集成式控制,通过收集云台,气缸,灯头的状态信息,实现实时控制。云台可以通过遥控器或者线控器进行控制,且遥控器控制的时候,线控器不能控制,线控器控制的时候,遥控器不能控制,满足技术要求要求的互锁功能。外来电源通过开关电源转换成需要的电压传送到控制板上,通过操作遥控器或线控器上的按键,可以控制气泵的开启与关闭,电磁阀的开闭,云台电机的正反转动以及灯具的亮灭。当电磁阀压力达到一定的时候,自动切断气泵的电源。当云台转动到极限角度的时候,限位开关自动给云台电机断电。无线通信模块通过无线传输网络传输数据,其光将光亮度检测传感器模块及有害气体检测传感器模块检测到的光亮度信息及有害气体信息传输至控制板,控制板对传感器检测到的信号进行处理。
13.具体的,控制板根据当前消防救援车辆的任务类型及光亮度信息控制强光照明装置及辅助照明装置启动或者关闭;当发生火灾时,由于燃烧产生的烟雾及颗粒等可能影响消防员的视野,此时当检测到的光亮度信息满足第一预设条件时,控制强光照明装置及辅助照明装置全部启动,提升火灾救援的效率。当车辆执行其他救援任务时,根据不同任务类
型及区域的照明亮度的需求设定不同的照明标准,根据光亮度的检测结果,控制相应区域内的预设照明条件对照明设备启动或者关闭;并将控制指令传输至第一、第二灯头,第一、第二灯头在控制模块的控制下,按照预设的指令打开或者关闭。
14.控制板还用于根据有害气体检测传感器模块检测到的有害气体信息辅助判断可能存在的燃烧物,并将信息发送至消防指挥人员的控制终端。混合气体与气体敏感单元输出一一对应,设被测的混合气体有n中成分,浓度分别为c1,c2,
…
,cn,传感器阵列有m个敏感单元,其检测值分别为r1,r2,
…
,rm,则响应模式的对应关系如下:
[0015][0016]
简写为:r=f(c)。设神经网络的输出映射为y=h(r),输出向量y=[y1,y2,
…
,yn],要使y=c,则必有h=f-1
。选定发生火灾时常见的有害气体的类型,基于神经网络进行迭代训练,得到神经网络中各层权值的最优解,并利用该模型辨别混合气体中的气体种类及对应的浓度。
[0017]
将求解得到的有害气体种类及相应的浓度通过无线通信模块发送至上位机及现场指挥人员的移动终端,辅助指挥人员判断火情火势及可能存在的燃烧物等信息。
[0018]
本发明还给出了一种消防救援车照明设备的使用方法,包括如下步骤:
[0019]
1)安装强光照明子系统及辅助照明子系统,强光照明子系统设置两套,将云台和灯头安装至升降气缸上部,确定位置后锁紧云台的连接螺栓,并做好防水处理;辅助照明子系统设置多套,分别设置于车前顶面、车后顶面、车中顶面、车顶右面以及伸缩臂或云梯的前端。
[0020]
2)消防救援车开至救援地点,可以通过遥控器或线控器手动控制强光照明子系统的升降、旋转,达到所需的照明要求;
[0021]
3)光亮度检测传感器模块实时检测周围的光强信号并传送至控制系统,控制系统根据检测到的光强信号自动控制强光照明子系统及辅助照明子系统的打开及关闭,并调整光照强度;当消防救援车辆用于救火时,检测到的光亮度信息满足第一预设条件时,控制强光照明子系统及辅助照明子系统全部启动;当车辆执行其他救援任务时,根据不同任务类型及区域的照明亮度的需求设定不同的照明标准,根据光亮度模块的检测结果,控制相应区域内的预设照明条件对照明设备启动或者关闭;
[0022]
4)有害气体检测传感器模块对燃烧产生的混合气体检测,并将响应信号发送至控制系统,控制系统对混合气体进行辨别,求解出其中每种气体的浓度,将气体种类及浓度信息发送至上位机及现场指挥者的移动终端。
[0023]
本发明的有益效果是:
[0024]
1)本发明的照明救援系统设置有强光照明子系统及辅助照明子系统,强光照明子系统可以升降及旋转,辅助照明子系统设置于车前顶面、车后顶面、车中顶面、车顶右面以及伸缩臂或云梯的前端,能够实现全方位、无死角的照明。
[0025]
2)本发明的照明救援系统设置有光亮度检测传感器模块,能够根据环境的光照条
件自动控制照明系统的开启及关闭,并且结合消防救援车的具体使用场景调整光照强度的调整方式。
[0026]
3)本发明的照明救援系统还设置有有害气体检测传感器模块,利用控制系统对混合气体进行分辨,识别出其中每种气体的种类及浓度,并将该信息发送至上位机系统及现场指挥者的移动终端,辅助进行火势火情及可能存在的燃烧物的判断。
附图说明
[0027]
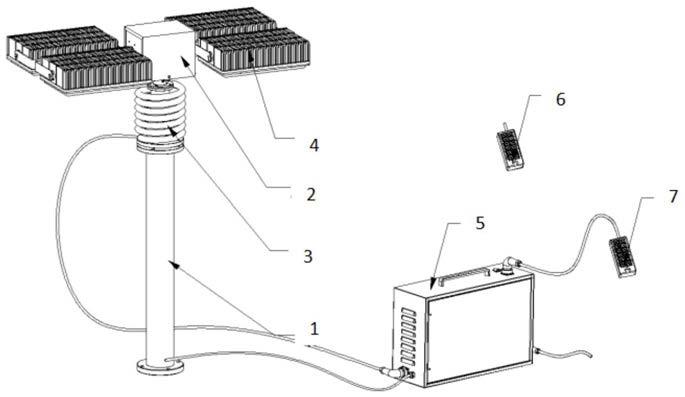
图1为强光照明子系统结构图。
[0028]
图2为强光照明子系统外观尺寸图。
[0029]
图3为控制系统原理框图。
[0030]
图4为辅助照明子系统结构图。
[0031]
图5为辅助照明子系统水平旋转方式示意图。
[0032]
图6为辅助照明子系统竖直翻转方式示意图。
[0033]
图7为遥控器面板示意图。
具体实施方式
[0034]
下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。应该指出,以下详细说明都是示例性的,旨在对本发明提供进一步的说明。
[0035]
除非另有指明,本文使用的所有技术和科学术语具有与本技术所属技术领域的普通技术人员通常理解的相同含义。需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本技术的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
[0036]
一种照明救援系统,包括强光照明子系统、辅助照明子系统、传感系统和控制系统。
[0037]
参见附图1-2,强光照明子系统设置两套,一套设置于消防救援车辆的中部,一套设置于车辆尾部,每套强光照明子系统包括气缸1、旋转云台2、电缆线3、第一灯头4。其中气缸1具有升降功能,通过气管与气泵连接,可实现第一灯头4的升降功能;第一灯头4、旋转云台2通过电缆线3与控制系统连接,通过电缆线3供电并发送控制信号,旋转云台2通过旋转轴承设置于气缸1的顶端,通过旋转云台2控制第一灯头4的转向,控制照明角度,实现照明搜索功能。
[0038]
第一灯头4设置有多个并分别固定在旋转云台2的两侧,可以随旋转云台2一起转动。光源采用多颗大功率led,均布在led铝基板上,led铝基板直接贴在灯具外壳上,导热快,散热效果好。灯具整体温升低,保证led光源的寿命,可满足灯具的长期可靠照明需求。聚光灯头采用出光角为6.7度的小角度透镜通过精准配光设计实现远距离照明,配光设计满足100米处照度大于700lx。灯具采用led光源熄灭后可马上进行二次启动,远小于技术要求规定的二次启动时间不大于2分钟的要求。灯具外壳采用锻造铝合金,一体成型,外形为长方形。
[0039]
旋转云台2可实现第一灯头4的俯仰和左右转动,具备体积小,重量轻等特点,设计重量≤20kg,转速32
°
/s,旋转云台2可实现水平0
°
~360
°
,垂直-45
°
~+45
°
转动,满足技术要求规定的“重量不大于30kg,水平旋转速度:不小于30度/秒;水平旋转角度:0度~360度连续旋转;垂直旋转范围:-45度~+45度”的要求。
[0040]
辅助照明子系统包括固定座8、旋转部分、灯主体9、连接件10、第二灯头18、透镜灯罩11、灯头散热器12以及电机。
[0041]
固定座8上端与旋转部分连接,底部提供与消防救援车的安装接口。灯主体9内置电机,灯主体9可绕固定座8水平360
°
旋转,同时可控制第二灯头18绕着灯主体9竖直翻转180
°
。连接件10把第二灯头18与灯主体9通过电机连接在一起,透镜灯罩11提供外壳防护和配光设计,灯头散热器12与透镜灯罩11一起为led提供外壳防护和散热,外壳防护等级ip66。灯具额定电压设计48v。灯光车辅助照明子系统采用光源led光源,选用cree xpg3高光效灯珠,灯珠光效可达190lm/w;方案采用24颗灯珠,采用12串2并设计方式,额定电压36v,光源功率100w,满足技术要求规定的“光源功率不大于120瓦”的要求;按照190lm/w计算光源总光通量为19000lm,透镜灯罩中透镜角度为6度,经模拟100米处中心照度≥45lx。设计满足技术要求规定的“光源功率不大于120瓦,100米中心照度不小于40勒克斯,光源类型为led光源”的要求。
[0042]
旋转部分包括水平旋转结构和竖直翻转结构,水平旋转结构主要组成部分为:水平旋转电机13、水平旋转限位开关15、大齿轮14,其中大齿轮14与灯主体9通过螺钉连接为一体,当水平旋转电机带动大齿轮14旋转时,灯主体9绕着底座水平旋转,水平旋转限位开关15可控制灯主体9旋转最大角度为360
°
。竖直翻转结构主要组成部分为:竖直翻转电机16、竖直翻转限位开关17、连接件10。其中连接件10将第二灯头18与内置竖直翻转电机16进行连接,当竖直翻转电机16旋转时带动第二灯头18绕着灯主体9旋转,竖直翻转限位开关17可控制第二灯头18翻转角度为0-180
°
。
[0043]
辅助照明子系统一共有11套,分成5组,按如下定义:前向灯:装在车前顶面,朝向车行进方向的4套辅助照明子系统;后向灯:装在车后顶面,朝向车后方的4套辅助照明子系统;左侧灯:装在车中顶面,朝向左侧的1套辅助照明子系统;右侧灯:装在车顶右面,朝向右侧的1套辅助照明子系统;救援灯:1套,装在伸缩臂或云梯的前端的辅助照明子系统。
[0044]
传感系统包括光亮度检测传感器模块及有害气体检测传感器模块。光亮度检测模块有多个,设置于车体四周,对其对应区域进行光亮度检测,并向控制系统提供光亮度信息;有害气体检测模块包括多个敏感单元形成传感器阵列,设置于辅助照明子系统的固定座上,用于检测环境气体中是否存在co、h2s、氮氧化物、二恶英等有害气体。
[0045]
控制系统包括操作控制箱5、遥控器6、线控器7,控制箱5内设有开关电源、驱动电源、控制板、电磁阀、无线通信模块。控制箱负责控制气缸的升降、云台的转动、辅助照明子系统的转动以及照明的开关;遥控器6通过无线控制灯具的升降、旋转、开关灯和调光;线控器7通过线缆控制灯具的升降、旋转、开关灯和调光。控制装置采用知名厂家的开关电源,具有电压稳定,散热性能好,寿命长等特点,同时采用集成式控制,通过收集云台,气缸,灯头的状态信息,实现实时控制。云台可以通过遥控器或者线控器进行控制,且遥控器控制的时候,线控器不能控制,线控器控制的时候,遥控器不能控制,满足技术要求要求的互锁功能。外来电源通过开关电源转换成需要的电压传送到控制板上,通过操作遥控器或线控器上的
按键,可以控制气泵的开启与关闭,电磁阀的开闭,云台电机的正反转动以及灯具的亮灭。当电磁阀压力达到一定的时候,自动切断气泵的电源。当云台转动到极限角度的时候,限位开关自动给云台电机断电。无线通信模块通过无线传输网络传输数据,其光将光亮度检测传感器模块及有害气体检测传感器模块检测到的光亮度信息及有害气体信息传输至控制板,控制板对传感器检测到的信号进行处理。
[0046]
具体的,控制板根据当前消防救援车辆的任务类型及光亮度信息控制强光照明装置及辅助照明装置启动或者关闭;当发生火灾时,由于燃烧产生的烟雾及颗粒等可能影响消防员的视野,此时当检测到的光亮度信息满足第一预设条件时,控制强光照明装置及辅助照明装置全部启动,提升火灾救援的效率。当车辆执行其他救援任务时,根据不同任务类型及区域的照明亮度的需求设定不同的照明标准,根据光亮度的检测结果,控制相应区域内的预设照明条件对照明设备启动或者关闭;并将控制指令传输至第一、第二灯头,第一、第二灯头在控制模块的控制下,按照预设的指令打开或者关闭。
[0047]
控制板还用于根据有害气体检测传感器模块检测到的有害气体信息辅助判断可能存在的燃烧物,并将信息发送至消防指挥人员的控制终端。混合气体与气体敏感单元输出一一对应,设被测的混合气体有n中成分,浓度分别为c1,c2,
…
,cn,传感器阵列有m个敏感单元,其检测值分别为r1,r2,
…
,rm,则响应模式的对应关系如下:
[0048][0049]
简写为:r=f(c)。设神经网络的输出映射为y=h(r),输出向量y=[y1,y2,
…
,yn],要使y=c,则必有h=f-1
。选定发生火灾时常见的有害气体的类型,基于神经网络进行迭代训练,得到神经网络中各层权值的最优解,并利用该模型辨别混合气体中的气体种类及对应的浓度。
[0050]
将求解得到的有害气体种类及相应的浓度通过无线通信模块发送至上位机及现场指挥人员的移动终端,辅助指挥人员判断火情火势及可能存在的燃烧物等信息。
[0051]
本发明还给出了一种消防救援车照明设备的使用方法,包括如下步骤:
[0052]
1)安装强光照明子系统及辅助照明子系统,强光照明子系统设置两套,将云台和灯头安装至升降气缸上部,确定位置后锁紧云台的连接螺栓,并做好防水处理;辅助照明子系统设置多套,分别设置于车前顶面、车后顶面、车中顶面、车顶右面以及伸缩臂或云梯的前端。
[0053]
2)消防救援车开至救援地点,可以通过遥控器或线控器手动控制强光照明子系统的升降、旋转,达到所需的照明要求;
[0054]
3)光亮度检测传感器模块实时检测周围的光强信号并传送至控制系统,控制系统根据检测到的光强信号自动控制强光照明子系统及辅助照明子系统的打开及关闭,并调整光照强度;当消防救援车辆用于救火时,检测到的光亮度信息满足第一预设条件时,控制强光照明子系统及辅助照明子系统全部启动;当车辆执行其他救援任务时,根据不同任务类型及区域的照明亮度的需求设定不同的照明标准,根据光亮度模块的检测结果,控制相应
区域内的预设照明条件对照明设备启动或者关闭;
[0055]
4)有害气体检测传感器模块对燃烧产生的混合气体检测,并将响应信号发送至控制系统,控制系统对混合气体进行辨别,求解出其中每种气体的浓度,将气体种类及浓度信息发送至上位机及现场指挥者的移动终端。
[0056]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1