一种集成多传感测距的机器人螺栓拧紧系统的制作方法
1.本发明涉及机器人轴孔自动装配技术,具体涉及一种集成多传感测距的机器人螺栓拧紧系统。
背景技术:
2.螺栓连接是一种常见的固定连接方法,螺栓连接具有结构简单,连接可靠和拆装方便等众多特点,在汽车,航空航天和大型机电设备等众多领域得到广泛应用。目前,进行螺栓连接工作主要通过人工拧紧或者固定在一个工位上的螺栓拧紧机进行拧紧。通过人工手持各种工具进行螺栓拧紧的方式,不仅劳动重复率高,生产效率低而且螺栓拧紧精度和可靠性并不高。通过固定在一个工位上的螺栓拧紧机进行拧紧工作,往往只是针对某一特定产品装配拧紧进行设计,应用对象局限性高,并且生产线柔性化较低。
3.随着机器人技术的发展,利用机器人集成系统进行自动化螺栓拧紧工作是提升产品装配质量和生产效率的关键途径。工业机器人装配作业具有精度高,柔顺性好和工作范围大等优点,采用末端装有螺栓拧紧机的工业机器人进行螺栓装配维修工作,既可有效提升装配质量和装配作业效率,同时也可以大大降低人工劳动强度。
技术实现要素:
4.本发明的目的在于,针对解决现有技术中存在上述问题的缺点,提出一种集成多传感测距的机器人螺栓拧紧系统,
5.为实现上述目的,按照本发明的一个方面,提供一种集成多传感测距的机器人螺栓拧紧系统,实现数字化,柔性化的螺栓拧紧装配,其特征在于,该集成多传感测距的机器人螺栓拧紧系统包括底座,所述机架上设有相机底座;
6.螺栓拧紧机构,所述的螺栓拧紧固定在底座上,包括提供驱动扭矩的伺服电机、减速器、传动轴和模块化螺栓夹持机构;
7.螺栓对中机构,所述的螺栓对中机构固定在底座上,其包括设置在传动轴四周的四个测距传感器和设置在减速器下方的测距传感器信息处理模块;
8.图像采集机构,所述的图像采集机构固定在相机底座上,其包括设置的ccd相机和相机视觉光源。
9.所述的减速器一端与伺服电机相连接,另一端与传动轴相连接;所述的传动轴下端与模块化螺栓夹持机构相连接;所述的模块化螺栓夹持机构内部设置有可以吸附与该模块螺栓夹持机构对应型号螺栓的永磁铁。
10.所述的四个测距传感器设置在底座的同一平面上,相邻两个测距传感器之间夹角呈九十度布置;所述的测距传感器信息处理模块上方与减速器相连接,下方通过垫板与底座相连接。
11.所述的相机固定在相机底座上,相机光轴与传动轴轴线互相平行;所述的光源位于相机的左下方,光源的轴线与相机光轴位于同一直线上。
12.本发明通过相机和光源采集螺栓孔的尺寸信息和位置信息,从而选取相对应装配螺栓的模块化螺栓夹持机构,在四个测距传感器精准测距下实现螺栓准确对中与拧紧工作。
13.本发明还提出来一种基于上述集成多传感测距的机器人螺栓拧紧系统的控制方法,其步骤如下:
14.1)通过相机对需要进行拧紧装配的螺栓孔进行图像采集并处理计算,获取螺栓孔的尺寸信息和位置信息;
15.2)根据螺栓孔尺寸信息从螺栓夹持机构库中选取并装上对应的螺栓夹持机构;
16.3)通过机器人驱动集成多传感测距的机器人螺栓拧紧系统,将夹持有螺栓的集成多传感测距的机器人螺栓拧紧系统运动至螺栓孔的上方;
17.4)安装在底座下方的四个测距传感器对当前位置下螺栓孔所在平面进行测距并处理,获得四个当前距离值(d1,d2,d3,d4);
18.5)与期望姿态时的四个期望距离值相比,可以得到四个距离偏差值(δd1,δd2,δd3,δd4),调整当前集成多传感测距的机器人螺栓拧紧系统姿态实现螺栓与螺栓孔精准对中;
19.6)伺服电机驱动传动轴进行旋转运动,机器人驱动对中螺栓拧紧机向螺栓孔进行法向进给,从而完成螺栓拧紧工作。
附图说明
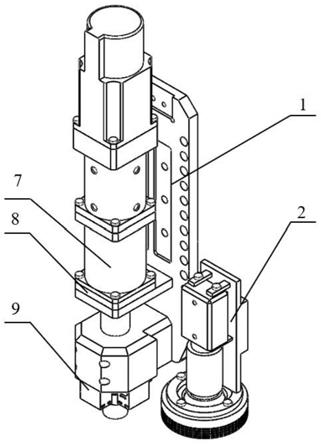
20.图1为本发明的结构示意图。
21.图2为本发明的螺栓拧紧机构的结构示意图。
22.图3为本发明的俯视图。
23.图4为本发明的图像采集机构的结构示意图。
具体实施方式
24.下面结和附图对本发明的实施例作进一步说明:
25.如图所示,本发明公开了一种集成多传感测距的机器人螺栓拧紧系统,包括底座1,所述机架上设有相机底座2。底座一方面作为螺栓拧紧机构和螺栓对中机构固定之用,另一方面用于与机器人末端法兰相连接,相机底座作为图像采集机构固定之用。
26.螺栓拧紧机构,所述的螺栓拧紧固定在底座1上,包括提供驱动扭矩的伺服电机3、减速器4、传动轴5和模块化螺栓夹持机构6;
27.螺栓对中机构,所述的螺栓对中机构固定在底座1上,其包括设置在传动轴5四周的四个可以进行精准测距的测距传感器8和设置在减速器下方的测距传感器信息处理模块7;
28.图像采集机构,所述的图像采集机构固定在相机底座上,其包括设置的ccd相机21和相机视觉光源22。
29.所述的减速器4一端与伺服电机3通过四个螺钉进行连接,另一端通过四个螺钉与传动轴5相连接,伺服电机3、减速器4和传动轴5在安装时三者的轴线位于统一直线上;所述的传动轴5下端与模块化螺栓夹持机构6相连接;所述的模块螺栓夹持机构6内部设置有可
以吸附与该模块螺栓夹持机构相对螺栓的永磁铁61。针对不同型号的螺栓,设计对应的模块螺栓夹持机构,在确定螺栓型号后,换取对应螺栓型号模块螺栓夹持机构6即可进行螺栓夹持。
30.所述的四个测距传感器9设置在底座的同一平面上,测距传感器9位于传动轴5的四周,相邻两个测距传感器之间夹角呈九十度布置;所述的测距传感器信息处理模块7上方通过螺钉与减速器相连接,下方通过垫板8与底座1相连接。
31.所述的相机21固定在相机底座2上,相机21光轴与传动轴5轴线互相平行;所述的光源22位于相机21的左下方,光源22通过螺钉固定在相机底座2上,光源22的轴线与相机21光轴位于同一直线上。
32.本发明通过相机和光源进行螺栓孔的尺寸信息和位置信息精确测量,确定需所需的模块螺栓夹持机构,机器人驱动对中螺栓拧紧机到达螺栓孔上方,通过四个测据传感器对螺栓孔所在平面进行精准测距,测距信息通过测距传感器信息处理模块进行信息处理,从而进一步调整对中螺栓拧紧机姿态使得所夹持的螺栓能够精确对中螺栓孔,从而实现螺栓拧紧工作。本发明可根据螺栓型号更换的不同型号模块螺栓拧紧机构使得装配螺栓更加多样化,通过固定在底座末端的四个测距传感器进行距离测量,进一步调整对中螺栓拧紧机姿态,从而实现了螺栓与螺栓孔的精准对中。
33.本发明还提供了一种基于上述对中螺栓拧紧机的控制方法,其具体步骤如下:
34.1)通过相机对需要进行拧紧装配的螺栓孔进行图像采集并处理计算,获取螺栓孔的尺寸信息和位置信息;
35.2)根据螺栓孔尺寸信息从螺栓夹持机构库中选取并装上对应的螺栓夹持机构;
36.3)通过机器人驱动对中螺栓拧紧机,将夹持有螺栓的集成多传感测距的机器人螺栓拧紧系统运动至螺栓孔的上方;
37.4)安装在底座下方的四个测距传感器对螺栓孔所在平面进行测距并处理,获得四个当前距离值(d1,d2,d3,d4);
38.5)与期望姿态时的四个期望距离值相比,可以得到四个距离偏差值(δd1,δd2,δd3,δd4),调整当前集成多传感测距的机器人螺栓拧紧系统姿态,若螺栓孔所在平面是平面,则期望距离值为d=d1=d2=d3=d4>l(l为螺栓的总长度),若螺栓孔所在平面是曲面,则需要在装配前通过三维扫描仪对曲面进行扫描,获取四个测距传感器测量点的曲率(r1,r2,r3,r4),则四个期望距离值为d1+r1=d2+r2=d3+r3=d4+r4>l;
39.6)伺服电机驱动传动轴进行旋转运动,机器人驱动对中螺栓拧紧机向螺栓孔进行法向进给,从而完成螺栓拧紧工作。
40.实施例不应视为对本发明的限制,但任何基于本发明的精神所作的改进,都应在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1