一种用于电子元器件抓取插接的气动夹爪的制作方法
[0001]
本实用新型涉及一种用于电子元器件抓取插接的气动夹爪,属于电子元器件插件机领域。
背景技术:
[0002]
目前,pcb板在焊接元器件时,需要将电子元器件预先插接在pcb上,再进行焊接,人工焊接费时费力。因此,机器手臂抓取元器件插接这项技术应运而生。
[0003]
现有的插接机大多采用气动夹爪来抓取元器件,但是只能抓取某几种大小规格的元器件,适应性差。在抓取元器件时,由于夹持不稳定,导致元器件掉落等问题。
技术实现要素:
[0004]
本实用新型所要解决的技术问题是,克服现有技术的不足,提供一种用于电子元器件抓取插接的气动夹爪,它可以抓取不同规格的电子元器件,在插接电子元器件时具有缓冲作用。
[0005]
为了解决上述技术问题,本实用新型的技术方案是:
[0006]
一种用于电子元器件抓取插接的气动夹爪,它包括外壳,所述外壳包括进气道和内腔,所述进气道和内腔连通,所述外壳的内腔里设置有压杆、弹簧和导向环,所述弹簧套设在压杆的上部,所述导向环固定在外壳的内腔底部,所述压杆的下部末端铰接有一组夹爪,所述压杆可在外壳的内腔里沿垂直方向滑动并由导向环进行导向,所述压杆带动夹爪在外壳的底部沿水平方向移动。
[0007]
进一步,所述外壳的内腔从上至下依次设置有滑槽、第一台阶、第二台阶、第三台阶和卡槽,所述压杆的上部可在滑槽内滑动,所述导向环的底部设置有与所述卡槽卡接的卡簧,所述第三台阶适于对导向环的顶部进行限位,所述第二台阶适于对压杆的中部进行限位,所述弹簧的一端与压杆的中部抵接,所述弹簧的另一端与第一台阶抵接。
[0008]
进一步,所述压杆的上部和中部轴向设置有供气通道,所述压杆的下部径向设置有出气通道,所述供气通道与出气通道连通。
[0009]
进一步,所述导向环内设置有用于压杆的下部滑动的通孔,所述通孔的外周设置有第一储气槽和第二储气槽,所述第一储气槽位于第二储气槽的上方,所述导向环的外周设置有第三储气槽。
[0010]
进一步,所述外壳的底部设置有一组滑道,两个所述夹爪分别通过连杆与压杆的下部相连,所述连杆的一端与夹爪铰接,所述连杆的另一端与压杆的下部铰接,所述夹爪可在滑道内移动。
[0011]
进一步,所述夹爪包括滑块和夹持块,所述夹持块与滑块的一端垂直连接,所述滑块的另一端与连杆的一端铰接,所述滑块与滑道配合滑动。
[0012]
采用了上述技术方案,本实用新型通过压杆的上下移动带动夹爪水平移动,从而实现抓取不同规格的电子元器件,通过弹簧和气压的作用力,使得整个抓取过程中,夹爪的
抓取有力而稳定。本实用新型结构简单,安装和拆卸简便,方便维护。
附图说明
[0013]
图1为本实用新型的一种用于电子元器件抓取插接的气动夹爪的主视图;
[0014]
图2为本实用新型的外壳的主视图;
[0015]
图3为图1的内部结构示意图;
[0016]
图4为本实用新型的压杆和夹爪的配合示意图;
[0017]
图5为本实用新型的导向环的结构示意图;
[0018]
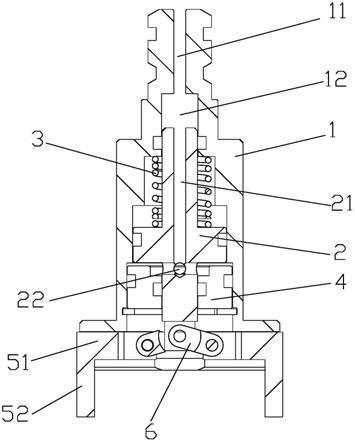
图6为本实用新型的一种用于电子元器件抓取插接的气动夹爪的剖视图;
[0019]
图7为本实用新型的导向环的剖视图;
[0020]
图8为本实用新型的外壳的剖视图。
具体实施方式
[0021]
为了使本实用新型的内容更容易被清楚地理解,下面根据具体实施例并结合附图,对本实用新型作进一步详细的说明。
[0022]
如图1~8所示,一种用于电子元器件抓取插接的气动夹爪,它包括外壳1,外壳1包括进气道11和内腔,进气道11和内腔连通,进气道11与气缸通过管道相连,外壳1的内腔里设置有压杆2、弹簧3和导向环4,弹簧3套设在压杆2的上部,导向环4固定在外壳1的内腔底部,压杆2的下部末端铰接有一组夹爪5。气缸向进气道11内通气,气体进入外壳1的内腔后进入压杆2内,气体再从压杆2的下部排出,压杆2的下部气体充满后,气压大于弹簧3的作用力,气体将压杆2顶起,压杆2可在外壳1的内腔里沿垂直方向滑动并由导向环4进行导向,然后压杆2带动夹爪5在外壳1的底部沿水平方向移动,实现抓取各种大小的电子元器件。
[0023]
如图6~8所示,外壳1的内腔从上至下依次设置有滑槽12、第一台阶13、第二台阶14、第三台阶15和卡槽16,压杆2的上部可在滑槽12内滑动,导向环4的底部设置有与卡槽16卡接的卡簧44,安装时,只需先将套有弹簧3的压杆2先放入外壳1的内腔中,然后再将导向环4插入,最后将卡簧44卡接在导向环4的底部,安装和拆卸均很简单。第三台阶15适于对导向环4的顶部进行限位,第二台阶14适于对压杆2的中部进行限位,弹簧3的一端与压杆2的中部抵接,弹簧3的另一端与第一台阶13抵接。气缸未通气时,弹簧3的作用力将压杆2的中部紧紧压在导向环4上,气缸通气后,压杆2带动夹爪5对元器件进行抓取,由于整个过程中弹簧3始终对压杆2施加反作用力,从而使夹爪5的夹持更加稳定牢固。
[0024]
如图6~8所示,压杆2的上部和中部轴向设置有供气通道21,压杆2的下部径向设置有出气通道22,供气通道21与出气通道22连通,导向环4内设置有用于压杆2的下部滑动的通孔,通孔的外周设置有第一储气槽41和第二储气槽42,第一储气槽41位于第二储气槽42的上方,导向环4的外周设置有第三储气槽43。气体从外壳1的进气道11进入后,再通过压杆2的供气通道21进入出气通道22,气体从出气通道22进入导向环4的第一储气槽41、第二储气槽42和第三储气槽43中,设置多组储气槽,可以保证气压足够顶起压杆2。
[0025]
如图2、3所示,外壳1的底部设置有一组滑道17,两个夹爪5分别通过连杆6与压杆2的下部相连,连杆6的一端与夹爪5铰接,连杆6的另一端与压杆2的下部铰接,夹爪5可在滑道17内移动。夹爪5包括滑块51和夹持块52,夹持块52与滑块51的一端垂直连接,滑块51的
另一端与连杆6的一端铰接,滑块51与滑道17配合滑动。压杆2上下滑动,带动夹爪5水平移动,从而可以抓取不同规格的电子元器件。
[0026]
以上所述的具体实施例,对本实用新型解决的技术问题、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1