全自动跟踪焊接车的制作方法
1.本实用新型涉及焊接设备技术领域,具体是全自动跟踪焊接车。
背景技术:
2.焊接车是在各种管道、罐体及有坡度、无坡度的拼接平板上进行焊接,能替代人工增加效率的焊接工具。目前市面上现有的焊接车局限性很大,需要人工肉眼去识别焊缝的位置,然后确定调整焊接角度以及在通过手动调整焊枪到达焊接位置。如果在高空等危险区域作业,操作人员的发生安全风险几率成倍增加,并且在焊接过程中焊接辐射对操作人员的皮肤,眼睛等伤害极大。
3.现有的焊接车其实就是用机器替代人工拿着焊枪,其本质还是需要人工在边上进行一系列的操作,说到底在焊接过程中还是离不开人工,对特种焊接存在的局限性非常大,并且仅仅依靠肉眼去确定焊缝的位置也会存在很大的误差,对于焊疤的完整度以及焊疤的外观都会产生很大的影响,在焊接过程中对人体的辐射伤害非常大。因此,本实用新型提供了全自动跟踪焊接车,以解决上述提出的问题。
技术实现要素:
4.本实用新型的目的在于提供全自动跟踪焊接车,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:
6.全自动跟踪焊接车,包括磁吸外直纹滚花轮、焊接车机架和触摸屏本体,所述磁吸外直纹滚花轮下端设有焊接车机架,焊接车机架后端安装有支架调节板,支架调节板上设有焊枪夹头,所述触摸屏本体外侧上设有触摸屏钣金罩,触摸屏钣金罩下端安装有外置通讯平板,触摸屏钣金罩上端设有小电机,小电机下端与触摸屏钣金罩连接处设有连接支板,连接支板上设有直线滑台,直线滑台远离小电机的一端设有伸出调节轴,伸出调节轴远离小电机的一端设有伸出调节板,伸出调节板下端设有左右摆动组件。
7.作为本实用新型进一步的方案,所述磁吸外直纹滚花轮上端设有防尘罩,防尘罩外端设有挡尘板。
8.作为本实用新型再进一步的方案,所述焊接车机架前端设有两个航空插头电源线,焊接车机架下端设有把手。
9.作为本实用新型再进一步的方案,所述伸出调节板与左右摆动组件连接处设有调节旋钮,调节旋钮上设有防滑纹。
10.作为本实用新型再进一步的方案,所述直线滑台一端设有三角支架,三角支架下端安装有支架调节板。
11.与现有技术相比,本实用新型的有益效果是:本实用新型提高了焊接工作效率,不需要人工肉眼去识别焊缝及小车行走位置,可以远程监控及操作,在危险地区使用时可以避免人员出现风险。
附图说明
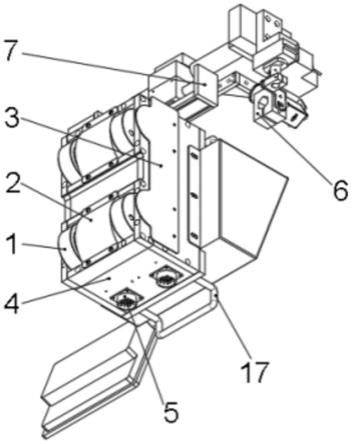
12.图1为全自动跟踪焊接车的结构示意图。
13.图2为全自动跟踪焊接车中触摸屏本体的结构示意图。
14.图中:1、磁吸外直纹滚花轮;2、防尘罩;3、挡尘板;4、焊接车机架;5、航空插头电源线;6、焊枪夹头;7、支架调节板;8、左右摆动组件;9、伸出调节板;10、伸出调节轴;11、三角支架;12、连接支板;13、小电机;14、直线滑台;15、触摸屏钣金罩; 16、触摸屏本体;17、把手;18、调节旋钮;19、外置通讯平板。
具体实施方式
15.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
16.请参阅图1
‑
2,本实用新型实施例中,全自动跟踪焊接车,包括磁吸外直纹滚花轮1、焊接车机架4和触摸屏本体16,所述磁吸外直纹滚花轮1下端设有焊接车机架4,所述磁吸外直纹滚花轮1上端设有防尘罩2,防尘罩2外端设有挡尘板3,所述焊接车机架4前端设有两个航空插头电源线5,焊接车机架4下端设有把手17,焊接车机架4后端安装有支架调节板7,支架调节板7上设有焊枪夹头6,所述触摸屏本体16外侧上设有触摸屏钣金罩15,触摸屏钣金罩15下端安装有外置通讯平板19,触摸屏钣金罩15上端设有小电机13,小电机13下端与触摸屏钣金罩15连接处设有连接支板12,连接支板12上设有直线滑台14,直线滑台14远离小电机13的一端设有伸出调节轴10,所述直线滑台14一端设有三角支架11,三角支架11下端安装有支架调节板7,伸出调节轴10远离小电机13 的一端设有伸出调节板9,伸出调节板9下端设有左右摆动组件8,所述伸出调节板9与左右摆动组件8连接处设有调节旋钮18,调节旋钮18上设有防滑纹。
17.本实用新型使用时,
18.1、确认管道直径,先用相应的管道机器人;
19.2、把机器人放置在焊接管道上;
20.3、吸附住后,调节焊枪和整体焊接的合理位置;
21.4、开始启动焊接;
22.5、配合外置通讯平板19远程监控,可在远处位置监控实时情况;
23.6、机器人在焊接过程中,找正焊缝,焊接完成;
24.7、如果需要继续焊接的,调整焊接机器人位置即可,不需要就取出机器人。
25.本实用新型采用机器视觉跟踪技术,自动识别焊缝位置调整焊枪角度及位置并且带有远程监控及操作设备,可以独立完成焊接任务。操作人员可远程监控小车各种参数及焊缝的位置,不需要在小车边上进行手动调整位置,大大降低了人员在危险区域作业时发生风险的几率。本产品自动识别焊缝,完成焊接自动结束,都不需要人员额外操作,真正做到了全自动焊接,可适应市面上90%以上的各种焊接领域。
26.本实用新型提出的一种全自动跟踪焊接车在最大的程度上免除了人工肉眼去识别焊缝的位置,使用机器视觉的识别也能很好的保证焊疤的完整性和外观的美观性,用机
器视觉免除人工肉眼识别带来的各种危险及不安全因素。
27.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1