一种焊接用接触传感装置的制作方法
1.本实用新型涉及一种焊接用接触传感装置,属于焊接技术领域。
背景技术:
2.吊挂管是用于吊挂燃煤电站锅炉中水平布置的受热面部件,其结构为管子与角板焊接结构。吊挂管焊接时会存在两种原因导致的管子变形,一方面为焊接过程中受热产生变形,即由于吊挂管焊接过程中产生的热量传递给吊挂管后,吊挂管的管子受热膨胀,将产生弯曲变形;另一方面是为到达焊接工序时的原始弯曲变形,即管子由于生产过程产生的原始变形、运输过程中挤压造成的变形、坡口加工过程中产生的变形等原因导致的弯曲变形。以上两种原因产生的管子弯曲变形,使吊挂管中管子与角板形成的焊接位置偏移,导致焊缝偏移,影响焊接质量。
3.因此,亟需提出一种焊接用接触传感装置,以解决上述技术问题。
技术实现要素:
4.本实用新型研发解决的是管子弯曲变形使吊挂管中管子与角板形成的焊接位置偏移的问题。在下文中给出了关于本实用新型的简要概述,以便提供关于本实用新型的某些方面的基本理解。应当理解,这个概述并不是关于本实用新型的穷举性概述。它并不是意图确定本实用新型的关键或重要部分,也不是意图限定本实用新型的范围。
5.本实用新型的技术方案:
6.一种焊接用接触传感装置,包括第二螺钉、第三螺钉、压缩弹簧、导套、导杆、导电块、探针、绝缘电木、支座和绝缘垫,探针、导杆、导电块、第二螺钉顺次连接,导杆上套装有压缩弹簧,压缩弹簧位于导套内,导套与支座连接,压缩弹簧的两端分别连接导杆和支座,支座侧壁加工有开口,导电块通过开口与支座滑动连接,支座与绝缘垫连接,支座与绝缘垫的连接部设置有绝缘电木,绝缘电木与第三螺钉连接。
7.优选的:还包括第一螺钉、平垫圈和弹簧垫圈,导电块与信号线通过第一螺钉连接,第三螺钉上从左到右依次套装有弹簧垫圈和平垫圈,第三螺钉穿过绝缘垫与机器人手臂连接。
8.优选的:所述支座侧壁的开口为轴向矩形槽,第一螺钉为内六角圆柱头螺钉m3
×
6,第二螺钉为内六角圆柱头螺钉m3
×
8,第三螺钉为内六角圆柱头螺钉m5
×
30。
9.优选的:所述机器人手臂与焊枪连接,焊接用接触传感装置与焊枪垂直设置。
10.本实用新型具有以下有益效果:
11.本装置在吊挂管自动化焊接过程中,采用探头与管子和角板分别接触,可重新获取工件焊接位置,实现准确焊接,保证焊缝不产生偏移,获得合格的焊缝质量;同时通过在自动化焊接过程中实时获取焊接位置,保证了焊接连续进行,提高了焊接效率;本装置可用于其他结构零件自动化焊接过程中的接触传感,获取工件实时位置。
附图说明
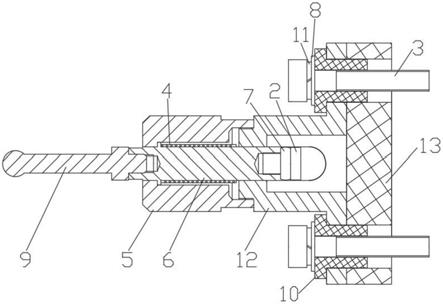
12.图1是一种焊接用接触传感装置的主视图;
13.图2是一种焊接用接触传感装置的侧视图;
14.图3是机器人手臂的主视图;
15.图4是机器人手臂的侧视图;
16.图5是导套的结构示意图;
17.图6是导杆的结构示意图;
18.图7是导电块的结构示意图;
19.图8是探针的结构示意图;
20.图9是支座的结构示意图;
21.图10是绝缘垫的结构示意图;
22.图11是吊挂管结构示意图;
23.图12是焊接用接触传感装置与吊挂管接触传感过程示意图。
24.图中1
‑
第一螺钉,2
‑
第二螺钉,3
‑
第三螺钉,4
‑
压缩弹簧,5
‑
导套,6
‑
导杆,7
‑
导电块,8
‑
平垫圈,9
‑
探针,10
‑
绝缘电木,11
‑
弹簧垫圈12
‑
支座,13
‑
绝缘垫,14
‑
机器人手臂,15
‑
焊枪。
具体实施方式
25.为使本实用新型的目的、技术方案和优点更加清楚明了,下面通过附图中示出的具体实施例来描述本实用新型。但是应该理解,这些描述只是示例性的,而并非要限制本实用新型的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本实用新型的概念。
26.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
27.具体实施方式一:结合图1
‑
图12说明本实施方式,本实施方式的一种焊接用接触传感装置,包括第二螺钉2、第三螺钉3、压缩弹簧4、导套5、导杆6、导电块7、探针9、绝缘电木10、支座12和绝缘垫13,探针9与导杆6螺纹连接,探针9若长时间使用产生磨损变形,可直接进行拆卸更换,方便快捷,导电块7通过内六角圆柱头螺钉2与导杆6压紧连接,导套5和支座12通过螺纹连接,导杆6上套装有压缩弹簧4,压缩弹簧4位于导套5内,压缩弹簧4的两端分别连接导杆6和支座12,压缩弹簧4将导杆6顶紧在导套5的前端,压缩弹簧4对探针9起到缓冲保护的作用,支座12侧壁加工有开口,导电块7通过开口与支座12滑动连接,支座12与绝缘垫13连接,绝缘垫13起到绝缘作用,支座12与绝缘垫13的连接部设置有绝缘电木10,绝缘电木10与第三螺钉3连接;在吊挂管自动化焊接过程中,探针9在接触工件时产生的压力,推动探针9连同导杆6在导套5和支座12中的空腔内轴向运动,压力通过导杆6上凸台传递给压缩弹簧4,压缩弹簧4与支座12接触产生压缩变形储蓄能量,当探针9离开工件时,压缩弹簧4恢复变形,并带动导杆6连同探针9往回运动,恢复到初始位置;此种缓冲运动避免了探针9
与工件之间的硬接触,对于提高接触传感的使用寿命产生有利作用,采用此装置与管子和角板分别接触,可重新获取工件焊接位置,实现准确焊接,保证焊缝不产生偏移,获得合格的焊缝质量;同时通过在自动化焊接过程中实时获取焊接位置,保证了焊接连续进行,提高了焊接效率;本装置可用于其他结构零件自动化焊接过程中的接触传感,获取工件实时位置。
28.具体实施方式二:结合图1
‑
图4说明本实施方式,本实施方式的一种焊接用接触传感装置,还包括第一螺钉1、平垫圈8和弹簧垫圈11,导电块7与信号线通过第一螺钉1连接,运行时信号线中的电流通过导电块9传导给导杆6再传导给探针9,第三螺钉3上从左到右依次套装有弹簧垫圈11和平垫圈8,第三螺钉3穿过绝缘垫13与机器人手臂14连接。
29.具体实施方式三:结合图1、图7、图9说明本实施方式,本实施方式的一种焊接用接触传感装置,所述支座12侧壁的开口为轴向矩形槽,第一螺钉1为内六角圆柱头螺钉m3
×
6,第二螺钉2为内六角圆柱头螺钉m3
×
8,第三螺钉3为内六角圆柱头螺钉m5
×
30。
30.具体实施方式四:结合图1
‑
图12说明本实施方式,本实施方式的一种焊接用接触传感装置,所述机器人手臂14与焊枪15连接,焊接用接触传感装置与焊枪15垂直设置;实现吊挂管焊接过程中准确实时获取焊接位置,避免焊缝偏移,保证焊接质量,通过自动化焊接过程中的位置校正,保证焊接过程连续进行,提高了焊接效率,装置结构紧凑;
31.在自动焊焊接之前先通过示教确定基准位置,过程探针9先接触角板,然后探针9向后移动距离l后再向下移动直到接触到管子为止,探针9在与管子/角板接触时,形成短路,探针9与控制系统电性连接,此时形成的电流作为一种信号通过信号线传递给控制系统,探针9与工件接触时确定了探针9与角板和管子接触位置的坐标,此处记为(x1、y1)和(x2、y2);
32.在焊接过程中管子产生变形后,探针9首先按照原行走路径直到接触到角板后停止(此时y方向位置不变),然后依然向后移动距离l后再向下移动直到接触到管子为止,当探针9的尖端与工件接触时形成短路,此时形成的电流作为一种信号通过信号线传递给控制系统,此时探针9与工件接触时确定了探针9与变形后的角板和管子接触位置的坐标,此处记为(x11、y1)和(x22、y22);控制系统中的计算机通过对比示教位置和变形后的接触传感坐标(x1、y1)和(x11、y1)、(x2、y2)和(x22、y22)之间的差值,可以获得变形后x方向焊接位置偏移量和y方向的焊接位置偏移量,其中x焊接位置偏移量
△
x=|x1
‑
x11|,y方向焊接位置偏移量
△
y=|y2
‑
y22|;若假设原焊接位置的坐标为(x0、y0),则变形后的焊接位置坐标为(x0
‑
(x1
‑
x11)、y0
‑
(y2
‑
y22));控制系统中的计算机重新计算获得变形后的焊缝位置坐标后,焊枪15按照此坐标位置进行焊接,保证焊接位置准确;图10中虚线代表示教时探针的传感过程,而实先代表变形后的接触传感过程。
33.需要说明的是,在以上实施例中,只要不矛盾的技术方案都能够进行排列组合,本领域技术人员能够根据排列组合的数学知识穷尽所有可能,因此本实用新型不再对排列组合后的技术方案进行一一说明,但应该理解为排列组合后的技术方案已经被本实用新型所公开。
34.本实施方式只是对本专利的示例性说明,并不限定它的保护范围,本领域技术人员还可以对其局部进行改变,只要没有超出本专利的精神实质,都在本专利的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1