一种链球式多功能缠绕物切削装置
1.本发明涉及一种链球结构的多功能水翼缠绕物的清除装置,具体地说是一种水下缠绕物的切削装置,尤其针对于螺旋桨缠绕异物的切削和清除。
背景技术:
2.船舶、潜艇等水下航行器在航行过程中螺旋桨经常遇到水中悬浮物的缠绕问题。其中因为在水中的原因,遇到一些特殊情况时,发生意外的情况相比于陆地可能会更加的棘手和危险。在缠绕物的影响下,当缠绕情况轻时,航行器螺旋桨的阻力增加能源消耗增加。当情况严重时,船舶发动机停止工作熄火或者尾轴失去控制,造成巨大的人员损伤和经济损失。目前,对螺旋桨缠绕物的切除方法主要有以下几种:人工清理、涡轮喷射水流技术、安装防缠绕装置等。
3.人工清理是当水下航行器出现缠绕情况时,派遣人员下水进行缠绕物的清除。这种清除方法是最有效的方法,但花费时间长,成本高。此外由于水下作业,对于操作人员的安全也存在隐患。利用涡轮喷射水流技术防止缠绕是指在船舶的尾部靠近螺旋桨处采用涡轮喷射系统,通过喷射强烈的水流使靠近船舶水翼的缠绕物远离,从而达到一个初步预防缠绕的作用。并且通过传感器发出信号警报通知驾驶人员,由驾驶人员结合地形等分析进一步避开缠绕物通过异常区域。这种方法对于水下缠绕物具有一定的预防作用,但是如果发生缠绕情况复杂时,成本高,清除效率小,很难做到完全顺利清除。安装舵浆防缠绕装置,这种方法是由国内专业人员提出研究并应用于实践,设计了一种刀具安装于舵浆,在舵浆转动的同时对缠绕物进行切割。此种方式简化了缠绕物的清除,且成本小。但是当碰到更加复杂的缠绕情况,依旧会发生缠绕。此外在舵浆上安装刀片可能会对船的推进产生影响。
4.目前在水下航行器的缠绕物清除领域上并不完善,没有一套完善的切割方案。因此,研究制造一种维修方便、使用便捷、效率高、智能的水下切割装置具有重要的意义。
技术实现要素:
5.为了解决目前安装螺旋桨切割装置刀刃在工作过程中改变螺旋桨前方流场,影响螺旋桨的推进性能的问题,提出了一种维修方便、效率高、重复利用、不会影响螺旋桨推进性能的、独立于船舶的多刀具链球式结构的缠绕物切削装置。
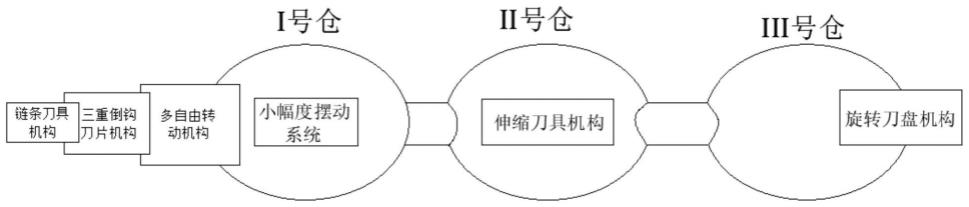
6.本发明包括装置本体,所述的装置本体上具有三个不同功能的仓体、多种类型切削刀具系统、小幅度摆动系统、驱动系统、图像信息采集反馈系统和照明系统;
7.所述的三个不同功能的仓体包括具有多种自由度切削功能和小幅度摆动功能的ι号仓,具有支撑、平衡功能和伸缩刀具的ιι号仓,具有摆动功能和旋转刀盘的ιiι号仓;
8.所述的多种类型切削刀具系统包括ι号仓头部前端的多自由度链条重刀结构、ιι号仓的伸缩刀具结构,ιiι号仓尾端的旋转刀盘结构;
9.所述小幅度摆动系统位于ι号仓内部,用于实现ι号仓前端的多自由度链条重刀结构的小幅度摆动;
10.所述的驱动系统包括用于实现装置本体运动的螺旋桨推进器和用于实现装置本体重心坐落于装置中部的空心浮块;所述的螺旋桨推进器对称安装在各个仓体的下方两侧,所述的螺旋桨推进器配合实现装置本体在水中的任意位置悬停以及任意方向的自由运动;所述的空心浮块安装在装置本体多自由度链条重刀结构的内部、ι号仓的内部和ιiι号仓体的内部,实现装置本体在水中重心的平衡;
11.所述的图像信息采集反馈系统设置在ι号仓前上端的两侧和ιiι号仓的尾端;
12.所述照明系统位于各个仓体的两侧和旋转刀盘结构的工作位置的上端;
13.所述的控制系统位于各个仓体支架内部的密封空间中,所述的控制系统的信号输入端与所述的图像信息采集反馈系统信号输出端信号连接,所述的控制系统的信号输出端相应端口通过无线分别与所述的多种类型切削刀具系统、驱动系统、照明系统的输入端信号连接;
14.所述的电力系统位于装置各个仓体内部密封舱内,并且所述的电力系统分别与所述的多种类型切削刀具系统、驱动系统、小幅度摆动系统、图像信息采集反馈系统、照明系统、控制系统电连接,为整个切削装置提供电力。
15.进一步说,所述多自由度链条重刀结构包括三重倒钩刀片结构、链条刀具结构和多自由度转动结构;
16.所述的三重倒钩刀片结构包括对称式六个倒钩刀片、两个刀片固定轴架、密封圈、滑动导轨、固定架、直线电机固定轴、直线电机伸缩轴、刀片连片、刀片端盖、刀片连杆、刀片连轴;倒钩刀片通过刀片固定轴架连接于滑动导轨上外侧,滑动导轨通过固定架固定于三重倒钩刀片结构装置外壳,一个刀片固定轴架通过刀片端盖和刀片连片与直线电机伸缩轴相连,另一个刀片固定轴架通过刀片连杆和刀片连轴与直线电机伸缩轴相连,直线电机伸缩轴一端与三重倒钩刀片结构装置外壳连接有密封圈,直线电机伸缩轴另一端与直线电机固定轴相连,直线电机固定轴固定于链条刀具装置的外壳;直线电机伸缩杆与装置内部安装密封圈;所述的直线电机与控制系统相连;
17.所述的链条刀具结构包括链条刀具、导轨型挡板、齿轮、一个齿轮电机、两个隔离罩、两个第一直线电机伸缩杆、两个第一直线电机固定杆;两个第一线电机固定杆通过法兰式固定结构固定在三重倒钩刀片结构装置的外壳的两侧,第一直线电机伸缩杆通过第一直线电机固定杆与直线电机连接;在第一直线电机伸缩杆前端放置并通过卡槽固定齿轮电机;齿轮电机轴与齿轮过盈配合;导轨型挡板固定于两侧的第一直线电机伸缩杆上;链条刀具与齿轮啮合;在两侧齿轮外部安装隔离罩;切削刀具焊接在链条侧面组成链条刀具;所述的齿轮电机与控制系统相连;
18.所述的多自由度转动结构包括一个转动电机、联轴器、支撑杆、转动台、转动台轴、转动支架、转轴支架轴、两个第二直线电机伸缩杆、两个第二直线电机固定杆;转动电机和支撑杆与ι号仓和ιι号仓的连接轴内部固定,转动电机轴与转动台轴通过联轴器进行连接,支撑杆用于承载转动台前端的结构,限制转动台沿轴向的运动;转轴支架轴安装于转动支架;转动支架和转动台轴固定于转动台;第二直线电机伸缩杆与第二直线电机固定杆相连,第二直线电机固定杆固定于转动台上;转动台通过转动支架和转动支架轴与ι号仓前端的三重倒钩刀片结构和链条刀具结构连接;所述的转动电机和直线电机与控制系统相连。
19.进一步说,所述小幅度摆动系统包括旋转电机、部分齿齿轮、两段齿条、推动杆、滑
动限制架、椭圆固定架、摆动箱、卡簧、固箱架;两段齿条固定于椭圆形固定架两边内侧,部分齿齿轮通过旋转电机与齿条啮合;为防止部分齿齿轮在旋转电机轴上的轴向运动,在部分齿齿轮的两侧安装卡簧;所述的椭圆固定架、两段齿条、旋转电机、部分齿齿轮位于摆动箱内部,推动杆固定于椭圆固定架;推动杆穿过摆动箱在滑动限制架滑动使得齿条与齿轮啮合;滑动限制架固定于摆动箱外部,摆动箱固定于固箱架上,固箱架连接于ι号仓和ιι号仓的连接轴上;所述的旋转电机与控制系统相连。
20.进一步说,所述的旋转刀盘结构包括旋转刀盘、大锥齿轮、大锥齿轮轴、小锥齿轮、刀盘减速箱、刀盘电机轴,反攻螺母、卡盘,卡簧、轴承端盖、轴承,其中刀盘减速箱体固定安装在ιiι号仓体内侧,刀盘电机固定安装在减速箱箱体内侧,刀盘电机轴与小锥齿轮配合连接,小锥齿轮与大锥齿轮啮合连接,大锥齿轮固定安装大锥齿轮轴的一端,大锥齿轮轴穿过卡簧、轴承端盖、轴承;大锥齿轮轴另一端具有部分螺纹,卡盘和旋转刀盘安装在大锥齿轮轴的另一端,卡盘用于保护和紧固旋转刀盘;旋转刀盘过盈配合大锥齿轮轴,轴端再通过反攻螺母进行固定;所述的刀盘电机与控制系统相连。
21.进一步说,所述的伸缩刀具结构包括两个划刀、两个连杆、蜗轮、两个蜗杆、两个固定杆、电机、电机箱、两个限位轴、两个卡簧、磁流体密封圈、密封圈,其中电机箱固定于ιι号仓中两侧限位轴中,两侧限位轴分别固定于ιι号仓内部;电机通过法兰结构固定于电机箱内部,电机轴与蜗轮进行连接,在蜗轮两侧增加卡簧;蜗轮与两侧的蜗杆进行啮合;蜗杆一端连接连杆,固定杆从蜗杆和连杆的中心电机箱穿过,一端固定于ιι号仓内部,另一端利用开口方式分别位于划刀的上下表面夹住划刀;划刀通过连杆固定在蜗杆上;划刀和ιι号仓外壳之间存在磁流体密封圈,连杆与电机箱之间有密封圈;所述电机与由控制系统信号连接。
22.进一步说,所述的图像信息采集反馈系统包括三部云台摄像头,其中两部是多自由度云台摄像头,安装在ι号仓的上端两侧;一部云台摄像头安装在ιiι号仓的尾端;所述的云台摄像头与图像信息传输模块信号输入端信号连接,所述的多自由度云台摄像头采用集成wifi模块的进行图像采集反馈。
23.进一步说,所述的驱动系统包括空心浮块和六个螺旋桨推进器,其中两个第一螺旋桨推进器分别竖直安装于ιι号仓的两侧,两个第二螺旋桨推进器分别水平安装ι号仓的下方两侧,两个第三螺旋桨推进器分别水平安装ιiι号仓的两侧,ι号仓和ιiι号仓下方两侧的螺旋桨推进器推动方向相反;空心浮块位于多自由度链条重刀结构的内部、ι号仓的内部和ιiι号仓的内部,通过控制空心浮块实现装置本体的重心位于中部;所述的螺旋桨推进器与所述的控制系统相连。
24.进一步说,所述的照明系统包括多块贴片led,所述的贴片led分别安装于各个仓体的两侧和旋转刀盘结构工作部位的上侧;所述的贴片led与电力系统相连。
25.本发明的有益效果是:链球式水翼缠绕物切削装置为独立装置,减少缠绕物对水下航行器尾轴、主机的损坏,具有体积较小、切割效率高,使用简单、维护方便,实用价值高等特点。切削装置具有多种类型切削刀具,当遇到金属缆绳时使用尾部ιiι号仓旋转刀盘配合ιι号仓和ιiι号仓之间的伸缩杆进行切削,当遇到水草、渔网等非金属缠绕物时使用ι号仓前端的多自由链条重刀结构进行处理,利用三重倒钩刀片结构配合多自由度转动结构和小幅度摆动结构将柔性缠绕物进行勾出或者扯断,再配合链条刀具结构进一步对缠绕物进
行切除;侧面安装的伸缩刀适用于不同环境下、不同工况下进行切削作业,通过伸出和收缩进行缠绕物切除或者通过伸出和装置本体移动进行划动切除;当航行船只的螺旋桨或者水下航行器被水草、海藻、缆绳等缠绕时,操作人员只需将装置投掷水下,通过无线遥控器控制装置本体进行水下作业;通过两部多自由转向云台摄像头、一部定向云台摄像头、照明系统获取水下各方面画面信息,实现了实时对缠绕物的切除,减少潜水员的劳动量以及船舶进坞次数,节约成本;此外由于属于独立装置,不必安装于水中航行装置上,可避免安装附带的流场影响,也不会影响到螺旋桨的推进性能。
附图说明
26.图1是本发明装置本体结构框图;
27.图2(a)是本发明装置本体主视图;
28.图2(b)是本发明装置本体俯视图;
29.图2(c)是图2(a)局部剖面图;
30.图3(a)是ι号仓图像采集反馈系统主视图;
31.图3(b)是ι号仓图像采集反馈系统俯视图;
32.图3(c)是ιiι号仓图像采集反馈系统主视图;
33.图4(a)是三重倒钩刀片结构主视图;
34.图4(b)是三重倒钩刀片结构俯视图;
35.图4(c)是三重倒钩刀片结构a-a图;
36.图5是本发明的链条刀具结构;
37.图6是本发明的多自由度转动结构;
38.图7是本发明ιiι号仓的尾部旋转刀盘结构;
39.图8(a)是ιι号仓中间部位伸缩刀结构主视图;
40.图8(b)是ιι号仓中间部位伸缩刀结构俯视图;
41.图9(a)是ι号仓内小幅度摆动结构主视图;
42.图9(b)是ι号仓内小幅度摆动结构俯视图;
43.图9(c)是ι号仓内小幅度摆动结构图。
具体实施方式
44.下面结合附图进一步说明本发明
45.结合附图1、附图2、附图9说明,包括装置本体,所述的装置本体上具体三个不同功能的仓体、安装多种类型切削刀具系统、小幅度摆动系统18、驱动系统、图像信息采集反馈系统16、照明系统、控制系统和电力系统。所述的三个不同功能的仓体包括具有多种自由度切削功能和小幅度摆动功能18的ι号仓,具有支撑、平衡和伸缩切削功能的ιι号仓,具有摆动式旋转切削的ιiι号仓;所述的多种类型切削刀具系统包括安装ι号仓头部前端的多自由度链条重刀结构、安装在ιι号仓的伸缩刀具结构17,安装在ιiι号仓尾端的旋转刀盘结构10;所述小幅度摆动系统18位于ι号仓内部,可实现ι号仓前端的多自由度链条重刀结构小幅度摆动;所述的驱动系统包括用于实现装置本体运动的螺旋桨推进器、用于实现装置本体重心坐落于装置中部的空心浮块,所述的螺旋桨推进器对称安装在各个仓体装置的两
侧,所述的螺旋桨推进器配合实现装置本体在水中的任意位置悬停以及任意方向的自由运动,所述的空心浮块安装在多自由度链条重刀结构的内部、ι号仓的内部和ιiι号仓体的内部,实现装置本体在水中重心的平衡;所述的图像信息采集反馈系统16设置在ι号仓的前上端的两侧和ιiι号仓的尾端;所述照明系统位于各个仓体的两侧和旋转刀盘结构工作位置的上端;所述的控制系统位于仓体支架内部的密封空间中,所述的控制系统的信号输入端与所述的图像信息采集反馈系统16输出端信号连接,所述的控制系统的信号输出端相应端口通过无线分别与所述的多类型切削刀具系统、驱动系统、照明系统的输入端信号连接;所述的电力系统位于装置仓体内部密封舱内,并且所述的电力系统分别与所述的多种类型切削刀具系统、驱动系统、图像信息采集反馈系统16、小幅度摆动系统、照明系统、控制系统电连接,为整个切削装置提供电力。所述的控制系统存在于多种类型切削刀具系统、小幅度摆动系统、驱动系统、图像信息采集反馈系统的内部,所述控制系统硬件部分均安装在各个仓体内部的密封空间内部。所述的电力系统包括小型蓄电池或者锂电池集成式的安装于图像信息采集反馈系统、多种类型切削刀具系统、驱动系统、小幅度摆动系统、照明系统、控制系统和电力系统。
46.本装置本体外形采用一种链球式结构的设计,如附图1和附图2所示,由最前端的多自由度链条重刀结构和三个不同功能的仓体连接构成。仓体外形采用近似流水线的外形结构,在水中运动时可以有效的减小阻力,节省能量,提高在水中的工作时长。其中多自由度链条重刀结构通过支撑轴与ι号仓体进行固定连接;ι号仓具有多种自由度切削功能和小幅度摆动功能18;ιι号仓体具有支撑装置本体和伸缩切削的功能17,ιι号仓体与ι号仓体通过圆锥销13和连接环进行连接,ιι号仓体的连接轴穿过ι号壳体,通过固箱架18.9与内部摆动箱18.3固定,另一端固定于ιι号仓体壳体上;ιiι号仓体具有旋转刀盘结构10;ιι号仓体和ιiι号仓体通过带有曲型挡板11的连接轴和伸缩杆6连接,连接轴一端带有曲型挡板11,位于ιiι号仓内部,另一端固定于ιι号仓体上。伸缩杆6的固定端固定于ιι号仓体,伸缩端固定于ιiι号仓体。在与ιι号仓连接处,ι号仓的壳面具有可压缩折叠材料结构14,结合ι号仓内部的小幅度摆动系统18可实现ι号仓的小幅度来回摆动,进而配合多自由度链条重刀切削系统实现更高效的扯取切除。在与ιι号仓连接处,ιiι号仓的壳面具有可压缩折叠材料结构7,可以通过ιι号仓体和ιiι号仓体之间的四个伸缩杆6实现ιiι号仓体的摆动,进而使用更高效的旋转刀盘结构10进行摆动切削。
47.结合附图3对图像信息采集反馈系统16的具体实施方式进行详细说明。图像信息采集反馈系统包括:两部多自由度转向云台摄像头16.1、一部定向云台摄像头16.5,主要负责采集反馈水下视频图像信息,并将采集反馈到的数据信息通过无线网络反馈到监控计算机处,以便操控人员监控水下作业情况和查看水下周围环境。其中两部多自由度转向云台摄像头16.1安装于ι号仓体外上端,一部定向云台摄像头16.5安装于ιiι号仓体内部。为清楚观察ιiι号仓切削系统工作和避免工作过程中碎屑对云台摄像头的损坏,在ιiι号仓中定向云台摄像头摄像画面前用部分透明结构16.6代替原有结构。图像信息采集反馈系统16可以采用集成wifi模块的云台摄像头,内置无线wifi模块,可以使用自身内置的wifi模块通过无线网络将拍摄到的视频图像信息直接地实时发送到监控计算机,让操作人员及时了解水下作业情况。在具体实施本方式时,操作人员利用两部多自由度转向云台摄像头16.1自身的旋转底座16.4、支撑杆16.2、旋转支架16.3实现对装置本体周围环境和切削系统的工
作情况。两台摄像头16.1可以同时转动,也可以单独转动。实现查看不同的方向,一台负责监控刀具作业情况,一台负责查看周围环境情况。定向云台摄像头16.5用于观察ιiι号仓的切削系统工作情况和尾部的环境情况。
48.结合附图4、附图5、附图6、对多自由度链条重刀结构的具体实施方式进行详细说明。多自由度链条重刀结构,包括三重倒钩刀片结构、链条刀具结构、多自由度转动结构。
49.结合附图4对三重倒钩刀片结构2的具体实施方式进行详细说明,三重倒钩刀片结构2包括对称式六个倒钩刀片2.1、刀片固定轴架2.2、刀片连片2.3、刀片固定轴架2.4、刀片连杆2.5、直线电机伸缩轴2.6、直线电机固定轴2.7、滑动导轨2.8、刀片端盖2.9、固定架2.10、刀片连轴2.11、密封圈2.12。直线电机伸缩轴2.6一端与直线电机固定轴2.7相连,直线电机固定轴2.7固定于装置的外壳,直线电机伸缩轴2.6与外壳连接有密封圈2.12,避免内部海水的灌入。直线电机伸缩轴2.6另一端通过刀片端盖2.9和刀片连轴2.11分别与刀片连片2.3、刀片连杆2.5连接,刀片连片2.3和刀片连杆2.5又分别与两侧固定轴架2.2和刀片固定轴架2.4进行相连,采用两种不同的方式与刀片固定轴架2.2和刀片固定轴架2.4连接的方式避免了在运动过程中产生的摩擦。刀片固定轴架2.2和刀片固定轴架2.4通过扣抓结构和自身结构连接于滑动导轨2.8,扣抓结构和自身结构的设置避免了三重倒钩刀片结构2通过多自由度转动结构3转动过程中的连带运动。滑动导轨2.8通过固定架2.10固定于装置上。六个倒钩刀片2.1分别三重对称式的固定于两侧固定轴架2.2上。对刀片采用带有倒钩、内刃和对称的三重结构避免和减少在抓取、夹取、扯取过程中缠绕物的脱落,对缠绕物进行有效切割。具体实施方式为操作人员利用图像反馈系统16得到水下图像信息后,操作直线电机固定轴固定2.7不动,直线电机伸缩轴2.6沿轴向方向移动,直线电机伸缩轴2.6通过刀片端盖2.9、刀片连轴2.11带动刀片连片2.3、刀片连杆2.5运动,进而带动两侧具有倒钩刀片2.1的刀片固定轴架2.2和刀片固定轴架2.4运动。由于刀片固定轴架2.2和刀片固定轴架2.4运动通过扣抓结构和自身结构连接于滑动导轨2.8,在运动过程中只能限制于导轨上移动。最终带动三重倒钩刀片2.1在导轨方向移动,实现对缠绕物的抓取、夹取、扯取、钩取。此外,可以通过更换刀片固定轴架2.2或刀片固定轴架2.4的刀片位置,实现部分重叠式的扯取、钩取。
50.结合附图5对链条刀具结构1的具体实施方式进行详细说明,所述的链条刀具结构包括两个直线电机固定杆1.1、两个直线电机伸缩杆1.2、两侧的齿轮1.3、两个隔离罩1.4、链条刀具1.5、导轨型挡板1.6、一个齿轮电机1.7。两侧直线电机固定杆1.1通过法兰式固定结构固定在三重倒钩刀片结构装置的外壳,直线电机伸缩杆1.2通过直线与电机固定杆1.1连接。在直线电机伸缩杆1.2前端放置并通过卡槽固定齿轮电机1.7;齿轮电机轴与齿轮1.3过盈配合;导轨型挡板1.6固定于两侧的直线电机伸缩杆1.2上,保护链条刀具1.5的顺利传动;链条刀具1.5与齿轮1.3啮合;在两侧齿轮1.3外部安装隔离罩1.4,避免齿轮1.3在清除缠绕物过程中发生二次缠绕物。切削刀具焊接在链条侧面组成链条刀具1.5,避免对齿轮啮合和链传动的影响。具体实施方式为操作人员利用图像采集反馈系统16得到水下图像信息后,再操作三重倒钩刀片结构2进行工作后,为配合三重倒钩刀片结构2工作,操作人员操作直线电机固定杆1.1固定不动,两侧直线电机伸缩杆1.2沿轴方向移动,一侧直线电机伸缩杆1.2前端带有齿轮电机1.7,通过控制直线伸缩杆1.2前端的齿轮电机1.2带动齿轮1.3旋转,进一步与链条刀具1.5啮合,带动另一侧齿轮1.3转动,实现链条刀具1.5的链传动。在三
重倒钩刀片2工作过程中或工作后,利用直线伸缩杆1.2的移动配合链条刀具1.5的链传动,实现链条刀具1.5对缠绕物的进一步有效的清除。
51.结合附图6对多自由度转动结构3的具体实施方式进行详细说明,所述的多自由度转动结构3包括一个转动电机3.1、联轴器3.2、支撑杆3.3、转动台3.4、转动台轴3.5、转动支架3.6、直线电机固定杆3.7、直线电机伸缩杆3.8、转轴支架轴3.9。转动电机3.1和支撑杆3.3与ι号仓和ιι号仓的连接轴内部固定。转动电机轴和转动台轴3.5通过联轴器3.2进行连接,联轴器3.2可以避免转心的偏移和承担部分负载。支撑杆3.3与转动台3.4一面连接,用于承载在转动台3.4和前端装置的大部分负载,也限制转动台3.4沿轴向的运动。转动支架轴3.9通过转动支架3.6固定于转动台3.4另一面。直线电机伸缩杆3.8一端与直线电机固定杆3.7相连,直线电机伸缩杆3.8另一端固定于ι号仓前端的三重倒钩刀片结构2和链条刀具结构1装置外壳。2个直线电机伸缩杆3.8分别安装转动支架轴3.9、转动支架3.6两侧。直线电机固定杆3.7固定于转动台3.4上。转动台3.4通过转动支架3.6和转动支架轴3.9与ι号仓前端的三重倒钩刀片结构2和链条刀具结构1连接。具体实施方式为操作人员启动转动电机3.1,转动电机3.1通过联轴器3.2带动转动台轴3.5转动。由于转动台轴3.5固定于转动台3.4,进一步带动转动台3.4的旋转,实现ι号仓前端的三重倒钩刀片结构2和链条刀具结构装置1的转动。此外,操作人员可以启动直线电机伸缩杆3.8,直线电机伸缩杆3.8的一端固定于ι号仓前端的三重倒钩刀片结构2和链条刀具结构1装置外壳。通过转动支架3.6两侧的直线电机伸缩杆3.7的协同运行,实现ι号仓前端的三重倒钩刀片结构2和链条刀具结构1装置在转轴支架轴3.9实现周向转动。两种转动方式的协作运行,再配合三重倒钩刀片结构2和链条刀具结构1实现多自由度链条重刀结构的实施,针对缠绕复杂情况进行更高效的清除。
52.结合附图7对旋转刀盘结构10的具体实施方式进行详细说明,所述的旋转刀盘结构包括刀盘减速箱10.1、刀盘电机轴10.2、小锥齿轮10.3、大锥齿轮轴10.4、大锥齿轮10.5、卡簧10.6、轴承端盖10.7、轴承10.8,卡盘10.9、刀盘10.10反攻螺母10.11,其中刀盘减速箱10.1固定安装在ιiι号仓体内侧,刀盘电机固定安装在减速箱箱体10.1内侧,刀盘电机轴10.2与小锥齿轮10.3过盈配合连接,小锥齿轮10.3与大锥齿轮10.5啮合连接,大锥齿轮10.5固定安装大锥齿轮轴10.4的一端,大锥齿轮轴10.4穿过卡簧10.6、轴承端盖10.7、轴承10.8。卡簧10.6、轴承端盖10.7防止大锥齿轮10.5和轴承10.8受重力影响产生掉落和工作过程产生轴向、径向偏移。大锥齿轮轴10.4另一端具有部分螺纹,卡盘10.9和旋转刀盘10.10安装在大锥齿轮轴10.4的另一端,卡盘10.9用于保护和紧固旋转刀盘10.10。旋转刀盘10.10过盈配合大锥齿轮轴10.4,大锥齿轮轴端再通过反攻螺母10.11进行固定;所述的刀盘电机与控制系统相连。具体实施方式为操作人员通过ιiι号仓内部的定向云摄像进行图像采集反馈16.4后。为配合ιι号仓前端的多自由度链条重刀结构切削或旋转刀盘结构10单独切削,操作人员启动刀盘电机,刀盘电机轴10.2带动小锥齿轮10.3进行旋转,小锥齿轮10.3通过与大锥齿轮10.5进行啮合,减少传递转矩。最后大锥齿轮10.5通过大锥齿轮轴10.4带动旋转刀盘10.10完成对刚性等缠绕物的切除。ιι号仓体和ιiι号仓体通过带有曲型挡板11的连接轴和4个伸缩杆6连接,伸缩杆的固定端固定于ιι号仓体,伸缩端固定于ιiι号仓体。在与ιι号仓连接处,ιiι号仓的壳面具有可压缩折叠材料结构7,可以通过ιι号仓体和ιiι号仓体之间的4个伸缩杆6实现ιiι号仓体的摆动,进而实现更高效的旋转刀盘结构10进
行摆动切削。
53.结合附图8对伸缩刀具结构17的具体实施方式进行详细说明。所述的伸缩刀具结构包括电机箱17.1、限位杆17.2、固定杆17.3、电机17.4、两个蜗杆17.5、蜗轮17.6、连杆17.7、划刀17.8、卡簧17.9、磁流体密封圈17.10、密封圈17.11,其中电机箱17.1固定于ιι号仓中两侧限位杆17.2之间,两侧限位杆17.2分别固定于ιι号仓内部。电机17.4通过法兰结构固定于电机箱17.1内部,电机轴与蜗轮17.6进行连接,为防止蜗轮17.6沿电机轴产生轴向运动,在蜗轮17.6两侧增加卡簧17.9。蜗轮17.6与两侧的蜗杆17.5进行啮合。蜗杆17.5一端连接连杆17.7,固定杆17.3从蜗杆17.5和连杆17.7的中心轴穿过,一端固定于ιι号仓内部,另一端采用开口方式分别位于划刀17.8的上下表面夹住划刀。这避免了在伸缩刀具工作过程中由于外力导致的划刀17.8和蜗杆17.5啮合位置产生位移。划刀17.8通过连杆17.7固定在蜗杆17.5上。为避免ιι号仓和电机的进水,在划刀17.8和ιι号仓之间采用磁流体密封圈17.10进行密封,在连杆17.7和电机箱17.1之间采用密封圈17.11进行密封。具体实施方式为操作人员启动电机17.4,电机17.4通过电机轴带动蜗轮17.6进行转动,蜗轮17.6与在固定杆17.3上的蜗杆17.5进行啮合,两侧蜗杆17.5带动连杆17.7上划刀17.8向两个相反运动。电机17.4不同的旋转方向带动蜗轮17.6不同方向的转动,带动蜗杆17.5在固定杆17.3上不同方向的移动,从而实现划ιι号仓两侧划刀17.8通过磁流体密封圈17.10进行伸出和收缩。通过控制电机17.4的转动角度和转动方向,控制划刀17.8的伸缩距离和伸缩方向。配合其他切削系统或单独通过伸出和收缩进行缠绕物切除或者通过伸出和装置本体移动进行划动切除。
54.结合附图9对小幅度摆动系统18的具体实施方式进行详细说明。所述小幅度摆动系统18包括推动杆18.1、滑动限制架18.2、摆动箱18.3、椭圆固定架18.4、部分齿齿轮18.5、两段齿条18.6、旋转电机18.7、卡簧18.8、固箱架18.9。两段齿条18.6固定于椭圆形固定架18.4的两边内侧,部分齿齿轮18.5通过旋转电机18.7与两侧齿条18.6啮合。为防止部分齿齿轮18.5在电机轴上进行的轴向运动,在部分齿齿轮18.5的两侧安装卡簧18.8。在所述的椭圆固定架18.4、两段齿条18.6、旋转电机18.7、部分齿的齿轮18.5位于摆动箱18.3内部,推动杆18.1固定于椭圆固定架18.4。为保证齿条18.6与部分齿齿轮18.5的啮合,推动杆18.1穿过摆动箱18.3在滑动限制架18.2滑动。滑动限制架18.2固定于摆动箱18.3外部,摆动箱18.3固定于固箱架18.9上,固箱架18.9连接于ι号仓和ιι号仓的连接轴上。具体实施方式为操作人员在配合多自由度链条重刀结构进行缠绕物切削工作时,启动旋转电机18.7,通过旋转电机18.7带动部分齿齿轮18.5进行转动,部分齿齿轮18.5与椭圆形固定架上的一侧齿条进行啮合,从而带动椭圆形固定架18.4进行移动。在椭圆形固定架18.4移动过后,部分齿齿轮18.5通过旋转电机18.7带动旋转到另一侧与椭圆形固定架18.4另一侧的齿条进行啮合。再次通过部分齿齿轮18.5和齿条的啮合带动椭圆形固定架18.4进行移动,从而实现椭圆形固定架18.4来回移动。在与ιι号仓连接处,ι号仓的壳面具有可压缩折叠材料结构14。由于推动杆18.1固定于椭圆形固定架18.4上,也实现了对ι号仓内壁推力的来回移动。结合ι号仓的壳面的可压缩折叠材料结构14,在配合多自由度链条重刀结构工作时,ι号仓的小幅度摆动,实现对缠绕物进行有效的扯取切除。
55.结合附图2、附图7、附图8,对驱动系统的具体实施方式进行详细说明。驱动系统主要包括空心浮块和六个螺旋桨推进器,其中两个第一螺旋桨推进器4分别竖直安装于ι号仓
的两侧,两个第二螺旋桨推进器5分别水平安装ιι号仓的两侧,两个第三螺旋桨推进器8分别水平安装ιiι号仓的两侧;ι号仓下方两侧和ιiι号仓下方两侧的螺旋桨推进器推动方向相反,空心浮块位于ι号仓和ιiι号仓内部,通过控制空心浮块给排水内实现装置本体的重心位于中部,不产生偏移;所述的6个螺旋桨推进器与所述的控制系统相连。具体实施方式为通过控制系统控制ι号仓下面的第一螺旋桨推进器4运行可以实现装置本体的后退;通过控制系统控制ιiι号仓下面的第三螺旋桨推进器8运行可以实现装置本体的前进;通过控制系统控制ιι号仓下方两侧的第二螺旋桨推进器5的运行可以实现装置本体的上升和下潜;当控制ι号仓和ιiι号仓下面的螺旋桨推进器单个运行时,例如运行第三螺旋桨推进器8.1或第三螺旋桨推进器8.2可以实现装置本体在水平面上的转向;当控制ιι号仓下面的第二螺旋桨推进器5单个运行时,即运行第二螺旋桨推进器5.1或第二螺旋桨推进器5.2可以实现装置本体在垂直面上的翻转。通过空心浮块和6个螺旋桨推进器之间的协同控制实现装置本体在水中的任意位置悬留以及任意方向的自由运动。
56.结合附图2、附图3、附图4、附图5、附图6、附图7、附图8、附图9对控制系统部分的具体实施方式进行详细说明。控制系统硬件部分安装在各个仓体内部的密封空间内部。控制系统主要实现多种刀具切削系统旋转电机进行旋转速度、方向、角度和停止的控制,实现分别控制第一螺旋桨推进器4的运转和停止,实现对ι号仓的两部多自由度转向图像信息采集反馈系统和ιiι号仓图像信息采集反馈系统的控制,实现小幅度摆动结构中齿轮的转动速度、方向、角度和停止;实现多种刀具切削系统的直线电机和各仓体之间的直线电机进程、方向和启停的控制,本发明的控制系统为无线遥感控制系统,由操作人员通过实时图像采集反馈系统显示和计算机进行主观具体控制。
57.结合附图2所述的照明系统包括多块贴片led,所述的第一贴片led 15分别安装于ι号仓体的两侧和前侧,所述的第二贴片led 12分别安装于ιι号仓体的两侧,所述的贴片第三led9分别安装于ιiι号仓体的后侧,即工作部位的上侧。具体实施方式为,当发生缠绕情况时,操作人员打开电力系统对照明系统进行供电,为水下环境提供良好的视觉环境。
58.对电力系统部分的具体实施方式进行详细说明,电力系统部分同样安装在不同仓体的内部密封舱内,主要采用小型蓄电池或者锂电池,可以重复充电和放电,为多种类型切削刀具系统、驱动系统、小幅度摆动系统18、图像信息采集反馈系统16、照明系统、控制系统等提供电力能量支持。
59.本说明书实施例所述的内容仅仅是对发明构思的实现形式的列举,本发明的保护范围不应当被视为仅限于实施例所陈述的具体形式,本发明的保护范围也包括本领域技术人员根据本发明构思所能够想到的等同技术手段。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1