一种动力电池盖板的超声波焊接定位装置及焊接定位方法与流程
1.本发明涉及动力电池制造技术领域,尤其涉及一种动力电池盖板的超声波焊接定位装置及方法。
背景技术:
2.科学技术的不断进步对于电池生产制造业的影响十分巨大,为设备提供电源的电池扮演着越来越重要的角色,市场的需求量也越来越大。动力电池盖板的组成部件包括顶盖片、极柱、防爆阀,在组装时,首先将防爆阀组装并焊接到顶盖片上,然后将正负两个极柱组装并焊接到顶盖片上体,而为了增加动力电池盖板的绝缘稳定性,一般会进一步组装塑胶皮。塑胶片通过超声波焊接在顶盖片上,一般作业流程为:采用对位治具进行顶盖片与塑制板之间的预装载,再通过超声波焊接(利用高频振动波传递到两个需焊接的物体表面,在加压的情况下,使两个物体表面相互摩擦而形成分子层之间的熔合)方式实现相对焊接固定。目前虽已有对顶盖片和塑胶皮的自动超声波焊接设备,但组装精度较低,导致产品合格率较低。
技术实现要素:
3.针对上述问题,本发明的目的是提供一种动力电池盖板的超声波焊接定位装置及焊接定位方法,提高顶盖片和塑胶片的组装精度,且焊接一致性较好,方便调试,降低治具成本。
4.根据本发明的一个方面,一种动力电池盖板的超声波焊接定位装置,用于将待焊电池盖板的顶盖片和塑胶片组装并焊接,所述超声波焊接定位装置包括焊接模组及输送模组,所述输送模组包括用于承载所述待焊盖板并使其经过所述焊接模组的载具,所述焊接模组包括:
5.支架;
6.超声波焊接头,其设置于所述支架上;
7.定位治具,其能够上下移动地设置于所述支架上,所述定位治具位于所述超声波焊接头的下方,所述定位治具用于对所述待焊盖板进行精确定位的定位部;及
8.支撑板,其能够水平移动地设置于所述支架上;
9.其中,所述载具上具有至少允许所述定位治具的所述定位部穿过的镂空部;
10.所述焊接模组具有第一工作状态和第二工作状态,在所述第一工作状态时,所述超声波焊接头和所述定位治具之间具有允许所述载具经过的空间,以使所述载具上的所述待焊盖板进入所述超声波焊接头下方;在所述第二工作状态时,所述定位治具的所述定位部位于所述载具的上方,以使所述待焊盖板位于所述定位治具上,所述定位治具位于所述支撑板上并被所述支撑板支撑;在由所述第一工作状态切换为所述第二工作状态的过程中,所述定位部穿过所述镂空部而顶升至所述载具的上方,以将所述待焊盖板自所述载具上顶起使其转移至所述定位部上。
11.在一优选的实施例中,所述定位治具具有用于承载所述待焊盖板的承载面,所述定位部包括用于对所述待焊盖板的长边进行定位的长边定位件、及用于对所述待焊盖板的短边进行定位的短边定位件,所述长边定位件成对设置且分别设置在所述承载面的两个长边处,所述短边定位件成对设置且分别设置在所述承载面的两个短边处。
12.在一更优选的实施例中,所述定位治具设置在治具座上,所述长边定位件包括顶盖片定位件和塑胶片定位件,所述顶盖片定位件成对地固定设置在所述治具座上,所述塑胶片定位件成对地且可水平移动地设置在所述治具座上以能够相对靠近或远离。
13.进一步地,所述焊接模组还包括用于驱动所述塑胶片定位件水平移动的定位气缸;所述顶盖片定位件具有能够和所述顶盖片的长边接触的第一定位面,所述塑胶片定位件具有对所述顶盖片进行避让的避让面及相对所述避让面突出的台阶定位面,所述台阶定位面能够和所述塑胶片的长边接触同时所述避让面和所述顶盖片的长边接触或相间隔,两个相对的所述塑胶片定位件的所述台阶定位面的间距小于两个相对的所述顶盖片定位件的所述第一定位面的间距。
14.在一优选的实施例中,所述载具上的镂空部的形状和所述塑胶片定位件的间距最大时所述承载面、所述定位部及所述定位气缸在水平面上的投影一致。
15.在一优选的实施例中,所述载具还具有围绕所述镂空部设置的台阶承载面,所述台阶承载面面向上方且低于所述载具的上表面;所述载具具有向所述镂空部的中部延伸悬臂,所述台阶承载面形成于所述悬臂上,所述悬臂之间具有允许所述定位治具通过的空间。
16.在一优选的实施例中,所述支撑板低于所述载具,所述焊接模组在所述第一工作状态时,所述支撑板脱离所述载具的正下方;所述焊接模组在所述第二工作状态时,所述支撑板位于所述载具的正下方并插入至所述定位治具的下方。
17.在一优选的实施例中,所述支架具有底座,所述底座上固定设置有沿z轴向上延伸的导柱及沿y轴延伸的导轨,所述载具能够沿x轴移动地设置,所述定位治具能够上下移动地设置于所述导柱上,所述支撑板能够沿水平方向移动地设置于所述导轨上;所述焊接模组还包括用于驱动所述定位治具上下移动的顶升气缸及用于驱动所述支撑板水平移动的支撑气缸;所述支架的上部设置有升降机构,所述超声波焊接头设置于所述升降机构上,所述升降机构包括用于驱动所述超声波焊接头上下移动的升降气缸,所述升降机构上还设有用于对所述超声波焊接头进行散热的散热风扇。
18.在一优选的实施例中,所述载具能够沿x轴移动地设置,所述超声波焊接定位装置包括两个沿x轴设置所述焊接模组,每个所述载具具有两个沿x轴并列排布的第一镂空部和第二镂空部,两个所述焊接模组同步运行,第一个所述焊接模组正对一个所述载具的第一镂空部上的待焊盖板时第二个所述焊接模组正对另一个所述载具的第二镂空部上的待焊盖板。
19.根据本发明的另一个方面,一种动力电池盖板的超声波焊接定位方法,包括如下步骤:
20.s1、载具携带待焊盖板移动至焊接模组处,其中超声波焊接头位于所述待焊盖板的上方,而定位治具位于所述待焊盖板的下方;
21.s2、所述定位治具上移且其定位部穿入载具的镂空部,直至将所述待焊盖板自所述载具上顶起,此时所述待焊盖板位于所述定位治具上,所述定位治具对所述待焊盖板进
行精确定位;
22.s3、支撑板移动至所述定位治具的下方,对所述定位治具进行支撑;
23.s4、超声波焊接头对所述待焊盖板进行焊接;
24.s5、焊接完成后,所述支撑板复位而脱离所述定位治具的下方;
25.s6、所述定位治具下移至所述载具的下方,该过程中所述定位部脱离载具的镂空部,焊接后的盖板落回至所述载具上。
26.在一优选的实施例中,所述载具能够沿x轴移动地设置,所述超声波焊接定位装置包括两个沿x轴设置所述焊接模组,每个所述载具具有两个沿x轴并列排布的第一镂空部和第二镂空部,每个载具的所述第一镂空部上承载第一个待焊盖板且所述第二镂空部上承载第二个待焊盖板,所述超声波焊接定位方法具体实施如下:
27.s101、第一个载具移动至第一个焊接模组处,其中该第一个焊接模组的超声波焊接头位于该第一个载具上的第一个待焊盖板的上方,而定位治具位于该第一个待焊盖板的下方;同时,第二个载具移动至第二个焊接模组处,其中该第二个焊接模组的超声波焊接头位于该第二个载具上的第二个待焊盖板的上方,而定位治具位于该第二个待焊盖板的下方;
28.s102、所述第一个焊接模组的定位治具上移且其定位部穿入第一个载具的第一镂空部,直至将第一个待焊盖板自第一个载具上顶起;所述第二个焊接模组的定位治具上移且其定位部穿入第二个载具的第二镂空部,直至将第二个待焊盖板自第二个载具上顶起;此时两个待焊盖板分别位于两个定位治具上,以分别对待焊盖板进行精确定位;
29.s103、两个焊接模组的支撑板分别移动至对应的定位治具的下方,对所述定位治具进行支撑;
30.s104、两个焊接模组的超声波焊接头分别对所述待焊盖板进行焊接;
31.s105、焊接完成后,两个焊接模组所述支撑板复位而脱离对应定位治具的下方;
32.s106、两个焊接模组的所述定位治具分别下移至对应载具的下方,该过程中所述定位部脱离载具的对应镂空部,第一个焊接模组焊接后的盖板落回至第一个载具的第一镂空部上,第二个焊接模组焊接后的盖板落回至第二个载具的第二镂空部上;
33.重复步骤s101至s107,使第一个载具携带一个焊接完成后的盖板和一个待焊盖板移动至第二个焊接模组处对第二镂空部上的待焊盖板进行焊接,第二个载具携带两个焊接完成的盖板进入下一工序,而第三个载具携带两个待焊盖板移动至第一个焊接模组处对其第一镂空部上的待焊盖板进行焊接。
34.本发明采用以上方案,相比现有技术具有如下优点:
35.本发明的动力电池盖板的超声波焊接定位装置及焊接定位方法,在第一工作状态时,载具位于超声波焊接头和定位治具之间;第一工作状态到第二工作状态的转换过程中,定位部穿过载具上的镂空部并且高于载具所在的平面,待焊盖板从载具上被顶起;在第二工作状态时,待焊盖板位于定位治具上,此时定位治具对待焊盖板进行精确定位,超声波焊接头对待焊盖板进行焊接,提高了组装精度,产品良率较高;特别是,仅需设置少量的定位治具(可以为一个)在输送线外进行定位,待焊盖板经过定位治具进行定位,焊接一致性较好;通过定位治具定位,而载具不需要设置复杂的定位结构,也不需要对载具进行定位调试,减小了调试难度,同时载具结构简化,也降低了治具(尤其是载具)成本。
附图说明
36.为了更清楚地说明本发明的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
37.图1为根据本发明实施例的动力电池盖板的超声波焊接定位装置的结构示意图;
38.图2为超声波焊接模组的立体示意图;
39.图3为图2所示的主视图;
40.图4为图2所示的侧视图;
41.图5为输送模组的立体图;
42.图6为焊接模组的局部结构示意图;
43.图7为图6中a处的局部放大图;
44.图8为图6所示的主视图;
45.图9为图6所示的侧视图;
46.图10为焊接模组的另一局部结构示意图;
47.图11为图10所示的主视图;
48.图12为根据本发明实施例的回转输送模组的局部的结构示意图。
49.其中,
50.200、待焊盖板;201、顶盖片;202、塑胶片;
51.300、超声波焊接定位装置;301、顶盖片上料皮带;302、顶盖片上料模组;303、塑胶片上料模组;304、回转输送模组;305、整形模组;
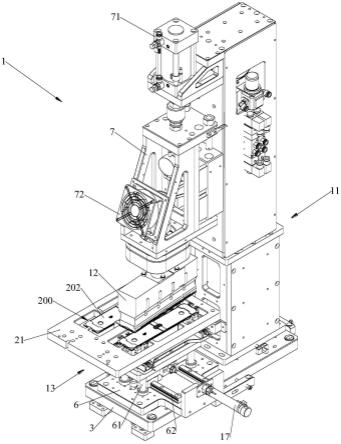
52.1、焊接模组;11、支架;12、超声波焊接头;13、定位治具;131、定位部;14、支撑板;15、定位气缸;16、顶升气缸;17、支撑气缸;3、治具座;4、长边定位件;41、顶盖片定位件;411、第一定位面;42、塑胶片定位件;421、避让面;422、台阶定位面;5、短边定位件;6、底座;61、导柱;62、导轨;7、升降机构;71、升降气缸;72、散热风扇。
53.2、输送模组;21、载具;211、台阶承载面;212、悬臂;213、第一镂空部;214、第二镂空部;215、固定部;23、滑台;24、齿轮;25、齿条;26、滑轨。
具体实施方式
54.下面结合附图对本发明的较佳实施例进行详细阐述,以使本发明的优点和特征能更易于被本领域的技术人员理解。在此需要说明的是,对于这些实施方式的说明用于帮助理解本发明,但并不构成对本发明的限定。
55.本实施例提供的动力电池盖板的超声波焊接定位装置300,其用于将待焊电池盖板200的顶盖片201和塑胶片202组装并焊接。超声波焊接定位装置300包括焊接模组1及输送模组2,输送模组2包括用于承载待焊盖板200并使其经过焊接模组1的载具21。
56.参照图1至图11所示,焊接模组1包括支架11;超声波焊接头12;定位治具13;支撑板14。
57.进一步地,超声波焊接头12设置于支架11上;定位治具13,其能够上下移动地设置于支架11上,定位治具13位于超声波焊接头12的下方,定位治具13具有用于对待焊盖板200进行精确定位的定位部131;支撑板14,其能够水平移动地设置于支架11上;载具21上具有
允许定位治具13的定位部131穿过的镂空部。
58.更进一步地,参照图6所示,定位治具13具有用于承载待焊盖板200的承载面,定位部131包括用于对待焊盖板200的长边进行定位的长边定位件4、及用于对待焊盖板200的短边进行定位的短边定位件5,长边定位件4成对设置且分别设置在承载面的两个长边处,短边定位件5成对设置且分别设置在承载面的两个短边处。定位治具13设置在治具座3上,长边定位件4包括顶盖片定位件41和塑胶片定位件42,顶盖片定位件41成对地固定设置在治具座3上,塑胶片定位件42成对地且可水平移动地设置在治具座3上以能够相对靠近或远离。焊接模组1还包括用于驱动塑胶片定位件42水平移动的定位气缸15,即塑胶片定位件42在定位气缸15的驱动下能够相对靠近和远离。具体地,定位完成后,塑胶片定位件42相对靠近。
59.更具体地,结合图6和图7所示,顶盖片定位件41具有能够和顶盖片100的长边接触的第一定位面411,塑胶片定位件42具有对顶盖片100进行避让的避让面421及相对避让面421突出的台阶定位面422,台阶定位面422能够和塑胶片202的长边接触同时避让面421和顶盖片100的长边接触或相间隔。由于顶盖片201的宽度(顶盖片201的两个长边的距离)比塑胶片202的宽度(塑胶片202的两个长边的距离)要大,故两个相对的塑胶片定位件42的台阶定位面422的间距小于两个相对的顶盖片定位件41的第一定位面411的间距。载具21上的镂空部的形状和塑胶片定位件42的间距最大时,承载面、定位部131及定位气缸15在水平面上的投影一致。
60.该焊接模组1具有第一工作状态和第二工作状态,在第一工作状态时,超声波焊接头12和定位治具13之间具有允许载具21经过的空间,以使载具21上的待焊盖板200进入超声波焊接头12下方;结合图11所示,在第二工作状态时,定位治具13的定位部131位于载具21的上方,以使待焊盖板200位于定位治具13上,具体地,通过长边定位件4和短边定位件5对待焊盖板200进行精准定位。定位治具13位于支撑板14上并被支撑板14支撑;在由第一工作状态切换为第二工作状态的过程中,定位部131穿过镂空部而顶升至载具21的上方,以将待焊盖板200自载具21上顶起使其转移至定位部131上。
61.参照图6所示,载具21还具有围绕镂空部设置的台阶承载面211,台阶承载面211面向上方且低于载具21的上表面。载具21具有向镂空部的中部延伸悬臂212,台阶承载面211形成于悬臂212上,悬臂212之间具有允许定位治具13通过的空间。
62.支撑板14低于载具21,焊接模组1在第一工作状态时,支撑板14脱离载具21的正下方;焊接模组1在第二工作状态时,支撑板14位于载具21的正下方并插入至定位治具13的下方,支撑板14对定位治具13起到支撑的作用,使得整体的结构更加的稳固。
63.参照图10所示,支架11具有底座6,底座6上固定设置有沿z轴向上延伸的导柱61及沿y轴延伸的导轨62。载具21能够沿x轴移动地设置,定位治具13能够上下移动地设置于导柱61上,支撑板14能够沿水平方向移动地设置于导轨62上。结合图11所示,该焊接模组1还包括顶升气缸16和支撑气缸17,顶升气缸16用于驱动定位治具13上下移动,支撑气缸17用于驱动支撑板14水平移动。
64.参照图2至图4所示,支架11的上部设置有升降机构7,超声波焊接头12设置于升降机构7上,升降机构7包括升降气缸71和散热风扇72,其中,升降气缸72用于驱动超声波焊接头12上下移动,由于超声波焊接头12容易发热,故在升降机构7上设置的散热风扇72有助于
散热。
65.载具21能够沿x轴移动地设置,超声波焊接定位装置包括两个沿x轴设置焊接模组1,每个载具21具有两个沿x轴并列排布的第一镂空部213和第二镂空部214,两个焊接模组1同步运行,第一个焊接模组正对一个载具21的第一镂空部213上的待焊盖板200时第二个焊接模组正对另一个载具21的第二镂空部213上的待焊盖板200。即该超声波焊接定位装置可以同时焊接两个电池盖板,工作效率较高。
66.参照图1所示,本发明动力电池盖板的超声波焊接定位装置300,其包括顶盖片上料皮带301、用于将顶盖片201放置到载具上的顶盖片上料模组302、用于将塑胶片202放置到载具21上的顶盖片上的塑胶片上料模组302、整形模组305、及用于携带载具21依次且循环地经过顶盖片上料模组302和塑胶片上料工位和焊接工位的回转输送模组304,超声波焊接定位装置300还包括上述的焊接模组1,超声波焊接定位装置100还将焊接模组1设置于回转输送模组304的旁侧。进一步地,结合图12所示,该回转输送模组304上具有滑台23和滑轨26,载具21设有固定部215,固定部215和滑台23通过螺栓固定连接。滑台23可沿x轴移动地设置于滑轨26上,滑台23上设有沿x轴延伸的齿条25以及齿轮24,齿条25和齿轮24相互啮合,齿轮24由输送电机驱动转动,从而并在齿轮24和齿条25的作用配合下使得滑台23下沿x轴移动。
67.本实施例还提供该动力电池盖板的超声波焊接定位方法,该超声波焊接定位方法包括如下步骤:
68.s1、载具21携带待焊盖板200移动至焊接模组1处,其中超声波焊接头12位于待焊盖板200的上方,而定位治具13位于待焊盖板200的下方;
69.s2、定位治具13上移且其定位部131穿入载具21的镂空部,直至将待焊盖板200自载具21上顶起,此时待焊盖板200位于定位治具13上,定位治具13对待焊盖板200进行精确定位;
70.s3、支撑板14移动至定位治具13的下方,对定位治具13进行支撑;
71.s4、超声波焊接头对待焊盖板200进行焊接;
72.s5、焊接完成后,支撑板14复位而脱离定位治具13的下方;
73.s6、定位治具13下移至载具21的下方,该过程中定位部131脱离载具21的镂空部,焊接后的盖板落回至载具21上。
74.该超声波焊接定位方法具体实施如下:
75.s101、第一个载具21移动至第一个焊接模组1处,其中该第一个焊接模组的超声波焊接头12位于该第一个载具21上的第一个待焊盖板200的上方,而定位治具13位于该第一个待焊盖板200的下方;同时,第二个载具21移动至第二个焊接模组处,其中该第二个焊接模组的超声波焊接头12位于该第二个载具21上的第二个待焊盖板200的上方,而定位治具13位于该第二个待焊盖板200的下方;
76.s102、第一个焊接模组1的定位治具13上移且其定位部131穿入第一个载具21的第一镂空部213,直至将第一个待焊盖板200自第一个载具21上顶起;第二个焊接模组1的定位治具13上移且其定位部131穿入第二个载具的第二镂空部213,直至将第二个待焊盖板200自第二个载具21上顶起;此时两个待焊盖板200分别位于两个定位治具13上,以分别对待焊盖板200进行精确定位;
77.s103、两个焊接模组1的支撑板14分别移动至对应的定位治具13的下方,对定位治具13进行支撑;
78.s104、两个焊接模组1的超声波焊接头12分别对待焊盖板200进行焊接;
79.s105、焊接完成后,两个焊接模组1的支撑板14复位而脱离对应定位治具13的下方;
80.s106、两个焊接模组1的定位治具13分别下移至对应载具21的下方,该过程中定位部131脱离载具21的对应镂空部,第一个焊接模组1焊接后的盖板落回至第一个载具的第一镂空部上,第二个焊接模组1焊接后的盖板落回至第二个载具的第二镂空部上;
81.重复步骤s101至s107,使第一个载具21携带一个焊接完成后的盖板和一个待焊盖板移动至第二个焊接模组1处对第二镂空部213上的待焊盖板200进行焊接,第二个载具21携带两个焊接完成的盖板进入下一工序,而第三个载具21携带两个待焊盖板200移动至第一个焊接模组1处对其第一镂空部213上的待焊盖板200进行焊接。即本实施例可以同时实现两个电池盖板的焊接,工作效率较高。
82.如本说明书和权利要求书中所示,术语“包括”与“包含”仅提示包括已明确标识的步骤和元素,而这些步骤和元素不构成一个排它性的罗列,方法或者设备也可能包含其他的步骤或元素。本文所使用的术语“和/或”包括一个或多个相关的所列项目的任意的组合。
83.需要说明的是,如无特殊说明,当某一特征被称为“固定”、“连接”在另一个特征,它可以直接固定、连接在另一个特征上,也可以间接地固定、连接在另一个特征上。此外,本发明中所使用的上、下、左、右等描述仅仅是相对于附图中本发明各组成部分的相互位置关系来说的,可参考附图1。
84.进一步可以理解的是,本公开中“多个”是指两个或两个以上,其它量词与之类似。“和/或”,描述关联对象的关联关系,表示可以存在三种关系,例如,a和/或b,可以表示:单独存在a,同时存在a和b,单独存在b这三种情况。
85.进一步可以理解的是,术语“第一”、“第二”等用于描述各种信息,但这些信息不应限于这些术语。这些术语仅用来将同一类型的信息彼此区分开,并不表示特定的顺序或者重要程度。实际上,“第一”、“第二”等表述完全可以互换使用。例如,在不脱离本公开范围的情况下,第一信息也可以被称为第二信息,类似地,第二信息也可以被称为第一信息。
86.上述实施例只为说明本发明的技术构思及特点,是一种优选的实施例,其目的在于熟悉此项技术的人士能够了解本发明的内容并据以实施,并不能以此限定本发明的保护范围。凡根据本发明的原理所作的等效变换或修饰,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1