新能源汽车自动泊车控制系统及其控制方法与流程
:
1.本发明涉及新能源汽车自动泊车控制系统及其控制方法,其属于汽车驾驶辅助系统技术领域。
背景技术:
2.对于众多司机来说,停车难是公认的难题,一来是随着生活水平的提高,汽车拥有量越来越多,公路、街道、停车场、居民小区等拥挤不堪,可利用的泊车空间越来越少;二来是对于停车时的难度,无论是顺列式泊车还是倒车入库,对逐渐增多的新手司机以及女司机来说停车相当难,泊车过程会花费很长时间且非常容易在停车时发生各式各样的事故。
3.因此,确有必要对现有技术进行改进以解决现有技术之不足。
技术实现要素:
4.本发明是为了解决上述现有技术存在的问题而提供新能源汽车自动泊车控制系统及其控制方法,只需轻轻启动按钮、坐定、放松,其他一切即可自动完成。
5.本发明采用如下技术方案:一种新能源汽车自动泊车控制系统,其特征在于:包括位于整车上的apa功能开关,分别位于整车前、后保险杠上的用于检测车辆前/后障碍物状态信息泊车雷达传感器,分别位于车辆前、后、左、右四个方向,用于搜索周围空间车位信息的自动泊车雷达传感器以及位于整车后部的自动泊车控制器。
6.本发明还采用如下技术方案:一种如权利要求1所述的新能源汽车自动泊车控制系统的控制方法,步骤如下:
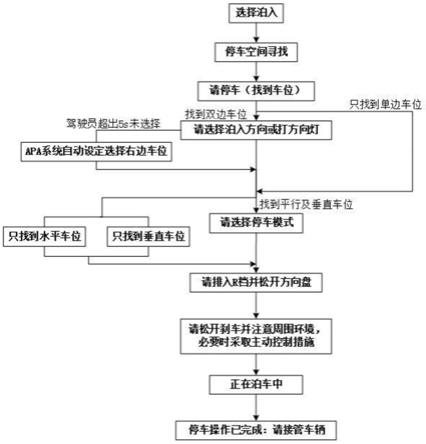
7.步骤一、车辆静止状态下,驾驶员在大屏上打开自动泊车开关,泊车功能开启;
8.步骤二、驾驶员驾驶车辆,apa系统通过自动泊车雷达传感器检测左右两边空间车位状态,并计算车辆行驶位置坐标;
9.步骤三、找到车位后,大屏通过语音和文字提示驾驶员“已找到车位,请停车”;
10.步骤四、此时分为几种车位情况:a.车宽+1m≤车位宽度<12m,车位深度≈车长+1m,判定为垂直车位,b.车长+1m≤车位宽度<12m,车位深度≈车宽+1m,判定为水平车位,c.左右同时搜寻到车位时,大屏语音和文字提醒驾驶员选择车位停车方向,是选择左边还是右边进行停车,系统默认为右侧车位,d.车长+1m≤车位宽度<12m,车位深度未检测出,大屏语音和文字提醒驾驶员选择车位停车模式;
11.步骤五、车位确定后,apa系统锁定目标车位坐标,并通过大屏语音或文字提醒驾驶员挂入r档,并开始泊车;
12.步骤六、apa系统根据车辆当前位置坐标及目标车位坐标值,计算泊车轨迹,控制转向、速度和制动,遵循计算的轨迹进行泊车(详情见图2所示);
13.步骤七、泊车过程中,有任何抑制信息则apa系统通过大屏语音或文字提醒驾驶员。
14.本发明具有如下有益效果:
15.1.一键完成整个泊车过程,不需要人工干预;
16.2.不管有没有车位线,只要目标车位两边有可识别的参照物且空间足够,就可以实现;
17.3.解决了停车位空间比较小,人工停车困难问题;
18.4.支持水平泊入、垂直泊入、水平泊出等功能,支持更多可泊车场景。
附图说明:
19.图1为本发明新能源汽车自动泊车控制系统的控制方法流程图。
20.图2为本发明新能源汽车自动泊车控制系统的泊车轨迹控制流程图。
具体实施方式:
21.下面结合附图对本发明作进一步的说明。
22.本发明新能源汽车自动泊车控制系统包括位于整车上的apa功能开关,分别位于整车前、后保险杠上的用于检测车辆前/后障碍物状态信息泊车雷达传感器,分别位于车辆前、后、左、右四个方向,用于搜索周围空间车位信息的自动泊车雷达传感器以及位于整车后部的自动泊车控制器。
23.本发明新能源汽车自动泊车控制系统的工作原理如下:通过泊车雷达传感器和自动泊车雷达传感器采集环境数据,自动泊车控制器将采集的数据分析处理后,得出汽车的当前位置、目标位置以及周围环境参数,计算出自动泊车策略,做出汽车行驶角度、方向及动力支持方面的控制,来实现自动识别可用车位并自动正确地完成停车入车位动作的系统。
24.本发明新能源汽车自动泊车控制系统的控制方法如下:
25.步骤一、车辆静止状态下,驾驶员在大屏上打开自动泊车开关,泊车功能开启;
26.步骤二、驾驶员驾驶车辆,apa系统通过自动泊车雷达传感器检测左右两边空间车位状态,并计算车辆行驶位置坐标;
27.步骤三、找到车位后,大屏通过语音和文字提示驾驶员“已找到车位,请停车”;
28.步骤四、此时分为几种车位情况:a.车宽+1m≤车位宽度<12m,车位深度≈车长+1m,判定为垂直车位,b.车长+1m≤车位宽度<12m,车位深度≈车宽+1m,判定为水平车位,c.左右同时搜寻到车位时,大屏语音和文字提醒驾驶员选择车位停车方向,是选择左边还是右边进行停车,系统默认为右侧车位,d.车长+1m≤车位宽度<12m,车位深度未检测出,大屏语音和文字提醒驾驶员选择车位停车模式;
29.步骤五、车位确定后,apa系统锁定目标车位坐标,并通过大屏语音或文字提醒驾驶员挂入r档,并开始泊车;
30.步骤六、apa系统根据车辆当前位置坐标及目标车位坐标值,计算泊车轨迹,控制转向、速度和制动,遵循计算的轨迹进行泊车(详情见图2所示);
31.步骤七、泊车过程中,有任何抑制信息则apa系统通过大屏语音或文字提醒驾驶员。
32.本发明新能源汽车自动泊车控制系统应用场景的共同匹配条件如下:
33.停车位条件:
[0034][0035][0036]
车位搜索控制条件:
[0037]
车位搜寻方式两侧同步搜寻搜寻车速≤20km/h搜寻时,车辆侧边与车位的距离dobj=0.5m~2.0m安全避障距离30cm
[0038]
泊车工作过程控制条件:
[0039]
泊车控制超时时间180s泊车过程中车速2km/h泊车完成后车身的偏斜角度≤3度
[0040]
本发明新能源汽车自动泊车控制系统的应用场景包括如下:
[0041]
1.自动泊入垂直车位,可实现的场景如下,其中dobj1为待泊车辆与其中一停放车辆之间的距离,dobj2为待泊车辆与另一停放车辆之间的距离:
[0042]
1.1.标准情形:侧边停放车辆一致直线摆放,停车位边无路沿。
[0043]
1.2侧边车辆不在同一水平线上,50cm<dobj1<dobj2<150cm。
[0044]
1.3.侧边车辆不在同一水平线上,50cm<dobj1<dobj2<150cm。
[0045]
1.4.侧边车辆向外有一个β角度,β角度小于最大允许值为5
°
。
[0046]
1.5.侧边车辆向内有一个β角度,β角度小于最大允许值为5
°
。
[0047]
1.6.2个停车位。
[0048]
1.7.两侧车位同步搜索,根据驾驶员选择左/右侧车位进行泊车。
[0049]
2.自动泊入水平车位,可实现的场景如下:
[0050]
2.1.标准情形:侧边停放车辆一致直线摆放,停车位边无路沿。
[0051]
2.2.标准情形,侧边停放车辆一致直线摆放。停车位边有路沿。
[0052]
2.3.侧边车辆不在同一水平线上,50cm<dobj2<dobj1<150cm。
[0053]
2.4.侧边车辆不在同一水平线上,50cm<dobj1<dobj2<150cm。
[0054]
2.5.侧边车辆向外有一个α角度,α角度小于最大允许值为5
°
。
[0055]
2.6.侧边车辆向内有一个α角度。α角度小于最大允许值为5
°
。
[0056]
2.7.避车道,侧边车辆停放在避车道内,该情形侦测结果与标准情形相同。
[0057]
2.8.2个停车位,总长度小于12m。
[0058]
2.9.两侧车位同步搜索,根据驾驶员选择左/右侧车位进行泊车。
[0059]
3.自动泊出水平车位,可实现的场景如下:
[0060]
3.1.无路沿,从两车之间左边泊出,车位长度l:≧车长+1m。
[0061]
3.2.无路沿,从两车之间右边泊出,车位长度l:≧车长+1m。
[0062]
3.3.有路沿,从两车之间泊出,轮胎与路沿距离10cm以上,车位长度l:≧车长+1m。
[0063]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下还可以作出若干改进,这些改进也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1