可缩回箱踏板的制作方法
1.本发明涉及用于车辆的在收起位置与数个展开位置之间旋转的可缩回箱踏板。
背景技术:
2.皮卡货车包括由在一对侧壁之间延伸的尾门选择性关闭的箱或拖斗。有时,个人必须进入拖斗以便装载和卸载货物。当尾门关闭时,个人可以在不开启尾门的情况下通过踏上后缓冲器并且然后到达或爬过尾门而进入拖斗。当尾门开启时,尾门位于后缓冲器正上方使得后缓冲器的大部分不能作为个人寻求进入拖斗的踏板来使用。此外,一些人发现即使在尾门关闭时也难以经由后缓冲器进入拖斗。该困难由下述事实导致:许多皮卡货车的后缓冲器处于对于许多人来说太高而不能舒服地踏上的高度。此外,现行设计允许踏板在缩回位置与展开位置之间进行枢转。然而,这些设计通常仅允许使用者在一个位置处进入箱。期望提供能够在收起位置与数个其他位置之间定位的箱踏板,以使得单个踏板允许数个不同的箱入口位置。
技术实现要素:
3.本发明涉及一种允许使用者进入比如为皮卡货车的车辆的后拖斗或箱的可枢转箱踏板。可枢转箱踏板包括安装至车辆底部的壳体。在本发明的一个特定实施方式中,壳体在后缓冲器的侧部或紧接在后缓冲器前方的后部拐角处被安装至车辆框架。在壳体内存在联接至马达的驱动组件。箱踏板联接至驱动组件并且能够相对于枢转组件移动。箱踏板在收拢于车辆下面的收起位置、车辆后部处的后部位置、车辆后部拐角处的拐角位置和从拐角入口位置向前的位于车辆侧部处的侧部箱入口位置之间移动。马达沿相反的第一方向和第二方向对驱动组件进行驱动以使箱踏板在收起位置、后部位置、拐角位置和箱侧部入口位置之间移动。
4.本发明的其他适用领域将由下文中提供的详细描述而变得明显。应当理解的是,详细描述和具体示例虽然指明了本发明的优选实施方式,但仅意在用于说明目的并且不意在限制本发明的范围。
附图说明
5.根据详细描述和附图本发明将被更充分地理解,在附图中:
6.图1是根据本发明的一个实施方式的可旋转箱踏板的俯视立体图。
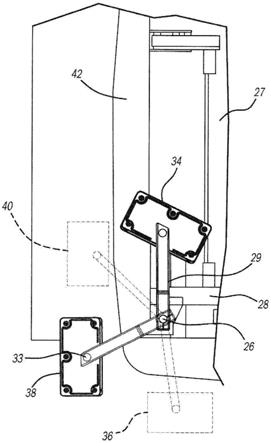
7.图2是根据本发明的一个实施方式的可旋转箱踏板的仰视立体图。
8.图3是根据本发明的一个实施方式的可旋转箱踏板的竖向致动器和传动装置的放大的仰视立体图。
9.图4是根据本发明的一个实施方式的可旋转箱踏板的顶视平面图。
10.图5是竖向马达组件和驱动组件的侧视立体图,其中壳体的一部分被移除。
具体实施方式
11.以下对优选实施方式的描述在本质上仅是示例性的,并且决不意在限制本发明、其应用或用途。
12.参照图1至图5,可枢转箱踏板装置10在一个实施方式中包括箱踏板12、具有输出轴15的枢转组件14、驱动臂16、驱动组件20、竖向马达组件22、电子控制单元24和安装支架26。安装支架26适于附接至车辆的框架28。尽管描述了安装至框架28,但框架28为车辆的具有适合强度以用于连接安装支架的一些其他结构也在本发明的范围内。
13.箱踏板12具有在其上提供踩踏表面的顶壁30。如图1至图3中所示,箱踏板12在接合部32处连接至驱动臂16。接合部32通常在驱动臂16的端部处布置有水平的卡扣配合连接。尽管描述了卡扣配合连接,但要使用的任何类型的适合连接比如焊接、粘合或紧固件也在本发明的范围内。图4描绘了通过具有接合部33实现的接合部32的替代方案,该接合部33允许箱踏板12手动地或利用致动器(未示出)以绕接合部33机械旋转的方式绕接合部33枢转。这允许顶壁30旋转至顶壁30的最大表面面积可以被使用者使用的位置。
14.驱动臂16枢转联接至枢转组件14的输出轴15,枢转组件14利用安装支架26连接至框架28。如图4中所示,箱踏板12在收起位置34、侧部入口位置36、拐角位置38和后部位置40之间移动。尽管示出了四个位置,但箱踏板12被定位在收起位置34与侧部入口位置36之间的更多数目或更少数目的位置处也在本发明的范围内。在收起位置34,箱踏板12通常被收拢在车辆27下面、后缓冲器42前,以便稍微隐藏不见并且为车辆27提供更干净、更一体的外观。在侧部入口位置36,箱踏板12通常从车辆27的箱或拖斗的侧部向外延伸,以辅助试图进入箱的更靠前的一部分或紧随车辆驾驶室之后的一部分的使用者。箱踏板12在位于后部位置40时被定位在后缓冲器42的后方,以辅助使用者进入车辆的箱的后部部分。箱踏板12在位于拐角位置38时被定位使得可以降低车辆的尾门但使用者仍然可以站在顶壁30上以进入箱的后部部分。
15.箱踏板12与驱动臂16通过利用连接至驱动臂16的一个端部的枢转组件14在各位置之间枢转。在一个实施方式中,通过使用者简单地抓住箱踏板12并且将其旋转至期望位置而使驱动臂16在各位置之间手动移动。在这样的实施方式中,枢转组件14包含延伸穿过枢转组件14的壳体的弹簧加载锁定止动器和形成在输出轴15上的接触开孔,该接触开孔接合锁销以将输出轴15锁定在预定停止位置。在另一实施方式中,枢转组件14的输出轴15为弹簧加载的并且在枢转组件14的壳体上存在被压下以使箱踏板12枢转的释放杆或释放按钮。
16.参照图1至图3和图5,示出了连接至安装支架26的竖向马达组件22的更多细节。驱动臂16连接至枢转组件14的输出轴15。输出轴15以可旋转的方式布置在枢转组件14内,枢转组件14用作将竖向马达组件22连接在枢转组件14上的基部。枢转组件14连接至安装支架26或与安装支架26一体形成。输出轴15具有延伸到枢转组件14的壳体的外部并且连接至驱动臂16的第一端部44。输出轴15延伸穿过枢转组件14和连接至枢转组件14的安装基部46到达第二端部48并且连接至联接器18。联接器18连接在第二端部48与驱动组件20的齿轮输出轴50之间并且用以在齿轮输出轴50与驱动组件20之间传递旋转力,同时适应齿轮输出轴50与驱动组件20之间的不对准,下面将对此进行更详细地描述。竖向驱动组件22包含两级蜗杆驱动,其包括连接至马达23的第一蜗杆58。驱动组件20允许根据特定的应用使用不同的
输出比。
17.为了适应车辆的后缓冲器42和框架构件28周围的区域的包装要求,所使用的马达具有竖向取向,意味着马达23的纵向轴线a
‑
a大体垂直于驱动臂16的纵向轴线b
‑
b。纵向轴线a
‑
a平行于竖向马达组件22的输出轴15的纵向轴线c
‑
c。在使用箱踏板12期间,施加在箱踏板上的力可能大到足以使输出轴15沿着纵向轴线c
‑
c移位。施加在箱踏板12上的力的范围可能为从微小的振动到置于驱动臂16上的可以使输出轴15移位或摆动的重型载荷。该力可能导致输出轴15与驱动输出轴50之间的移动或可能的不对准。为了吸收施加在输出轴15上的力并且防止不对准,在一些实施方式中联接器18由挠性材料制成。然而,在其他实施方式中联接器18更刚性并且由较硬的材料制成,比如钢、铝或其他合适的材料。然而,联接器18的功能是保持输出轴15、驱动输出轴50与连接至输出轴15和驱动输出轴50的各种部件中的全部部件之间的功能性对准。可选地,在驱动组件20与安装基部46之间安置有橡胶垫圈52,橡胶垫圈52可以独立于挠性联接器使用或作为对挠性联接器的附加而使用。橡胶垫圈52的作用是吸收安装基部与驱动组件20之间的力。
18.驱动组件20包括布置在驱动壳体部分内并且能够在驱动壳体部分中旋转的第二蜗杆62。第二蜗杆62以可操作的方式联接至马达23,如参照图5所述。另外参照图5,示出了驱动组件20和竖向马达组件22的视图。竖向马达组件22包括连接至马达23并且由马达23驱动的第一蜗杆58。第一蜗杆58与驱动组件20的第一齿轮60啮合接合。第一齿轮60线性连接至第二蜗杆62。第二蜗杆62与第二齿轮64啮合接合,第二齿轮64连接至齿轮输出轴50的顶部。齿轮输出轴50具有连接至联接器18的端部,该联接器18连接至枢转组件14的输出轴15。
19.在操作期间,马达23沿第一方向使第一蜗杆58旋转。第一蜗杆58与第一齿轮60啮合接合,并且使第一齿轮60沿与第一蜗杆58的第一方向相反的第一方向旋转。第一齿轮60沿第一方向的旋转使得第二蜗杆62沿与第一齿轮60的方向相同的第一方向旋转,因为第一齿轮60与第二蜗杆62彼此连接。第二蜗杆62的旋转使得第二齿轮64、齿轮输出轴50、联接器18、输出轴和箱踏板12沿与第二齿轮64的第一方向相反的第一方向旋转。当马达23沿第二方向旋转时,第一蜗杆58、第一齿轮60、第二蜗杆62、第二齿轮64、齿轮输出轴50、联接器18、输出轴和箱踏板12也将沿与以上描述的其第一方向相反的第二方向旋转,由此产生箱踏板12。
20.马达23包括壳式结构,该壳式结构包括常规的位置感测及编码马达,该位置感测及编码马达使马达轴(未示出)沿相反的第一方向和第二方向旋转。箱踏板的位置可以由ecu 24以多种方式确定。ecu 24可以以预定时间量开启马达23或者通过感测马达23、第一蜗杆58、第一齿轮60、第二蜗杆62和第二齿轮64的旋转数来开启马达23。马达23固定至驱动组件20。壳式结构通过多个紧固件固定至驱动壳体部分。应理解的是,在一个实施方式中,壳式结构可以被认为是枢转组件14的一部分,因为枢转组件14保持齿轮和马达部件与外部环境密封隔绝。
21.电子控制单元24电子控制竖向马达组件22来实现箱踏板12在收起位置、驾驶室入口位置和箱侧部踏板位置之间的移动。电子控制单元24安装在车辆内远离枢转组件14的位置处。电子控制单元24通过车辆的线束54电连接至竖向马达组件22,并且电连接至结合在车辆的车身上的开关56。开关56可以位于驾驶室或车辆中、箱的侧部上或侧壁中。在另一实施方式中,电子控制单元24可以物理地安装至枢转组件14或安装至马达组件22,并且电连
接至马达组件22。
22.在马达组件22被关断之后,第一蜗杆58、第一齿轮60、第二蜗杆62、第二齿轮64导致箱踏板12保持在驾驶室入口位置,因为众所周知蜗杆不能被反向驱动。因此,啮合接合导致第一蜗杆58和第二蜗杆62将抵抗沿远离驾驶室入口位置和朝向收起位置的方向施加至驱动臂16的外力。当开关构件56被激活以使箱踏板12移动至收起位置34时,开关向电子控制单元24发送信号。电子控制单元24响应于该信号而提供适当的电压以使箱踏板12移动至收起位置34。具体地,马达23沿一旋转方向使第一蜗杆58旋转,第一蜗杆58进而使第二蜗杆62旋转并且最终使第二齿轮64和齿轮输出轴50旋转。这使得输出轴15与第二齿轮64一起旋转并且驱动了驱动臂16朝向车辆向内枢转,以使箱踏板12移动至收起位置。在本发明的一个实施方式中,电子控制单元24然后用于在箱踏板12抵接收起止挡部29时关闭马达23,该收起止挡部29在本实例中是车辆的框架28上的表面。然而,收起止挡部29是安装支架26上的表面也在本发明的范围内。箱踏板12将继续朝向收起位置移动直到箱踏板12抵接收起止挡部29为止。当箱踏板12撞击收起止挡部29时,由于马达组件22遇到运动阻力,在马达23中产生电流尖峰。电流尖峰将被电子控制单元24瞬间检测到。响应于电流尖峰,电子控制单元24关闭马达23。
23.本发明的描述本质上仅是示例性的,并且因此,与本发明的要旨不背离的变型意在处于本发明的范围内。这种变型不应被视为背离本发明的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1