电动旋转装置及利用该电动旋转装置的电动旋转控制方法与流程
1.本说明书中公开的内容涉及一种电动旋转装置,尤其涉及一种通过电力工作的电动旋转装置以及利用所述电动旋转装置的电动旋转控制方法。
背景技术:
2.在本说明书中,除非另有明确的记载,否则在本标识项目中进行说明的内容并不是与本技术的权利要求相关的现有技术,而且并不能因为记载在本标识项目中而将其认定为是现有技术。
3.通常来讲,安装在车辆内部的座椅可以通过旋转装置进行转动,而借助于座椅的转动,可以使得搭乘车辆的搭乘人员彼此相向而坐,从而提升在车辆内部的便利性。
4.通过配备于电动汽车、自动驾驶汽车以及露营车内部的便利装置,可供搭乘人员在车辆内部使用的便利配置也在随之增加,而伴随着如上所述的趋势,与通过变更座椅的位置而提升空间利用率相关的需求也在逐渐增加。
5.与其相关地,在韩国公开专利公报第10-2019-0048405号中公开了一种汽车座椅的电动旋转装置,而在韩国注册专利公报第10-1448282号中公开了一种可供行动不便人士使用的上下车智能座椅。
6.但是,现有的发明中并没有公开不需要担心在车辆内部发生碰撞就可以转动座椅的技术。
技术实现要素:
7.本发明旨在提供一种可以通过电力对座椅的旋转进行控制并防止其发生碰撞的电动旋转装置以及利用所述电动旋转装置的电动旋转控制方法。
8.但是,并不限定于如上所述的技术课题,而是可以通过下述说明推导出其他技术课题。
9.在所公开内容的一实施例中,电动旋转装置,包括:座椅转动部,通过旋转电机的驱动转动座椅;以及,控制部,以与所述旋转电机电性连接的方式形成;所述控制部通过对所述旋转电机进行控制而转动所述座椅,并通过形成于所述座椅上的传感器或所述旋转电机的电流状态检测而在检测到周围的障碍物时停止所述旋转电机。
10.此外,电动旋转装置,还可以包括:超声波传感器,附着到所述座椅上,在有物体或人接近时将检测信号传送到所述控制部。
11.此外,所述控制部,可以包括:输出部,在接收到所述检测信号时输出声音或输出光线。
12.此外,所述控制部可以对所述旋转电机的电流以及霍尔传感器波形进行检测并与预先设定的所述旋转电机的电流以及霍尔传感器波形进行比较,从而在出现差异的情况下停止所述旋转电机或通过所述输出部进行输出。
13.此外,所述座椅转动部,可以包括:上盘,以与车辆的座椅结合的方式形成;下盘,
在所述上盘的下部以与所述上盘结合的方式形成;中盘,在所述上盘以及下盘之间以可将上下部轴作为基准转动的方式进行配置,并以与车辆框架连接的方式形成;轴承部,分别配置在所述中盘的上部以及下部;以及,旋转电机,形成有与所述下盘齿轮连接的驱动轴。
14.此外,所述座椅转动部,还可以包括:插闩部,以通过与所述控制部连接的电机而将可转动地结合到所述上盘上的插杆插入到形成于所述中盘上的通孔或将其从所述通孔中分离的方式形成。
15.此外,作为包括结合到车辆上的中盘、可转动地与所述中盘结合的上盘、结合到所述中盘上且与所述上盘齿轮连接的旋转电机、结合到所述上盘上且可插入到所述中盘上或从中分离的插闩部、在结合到所述上盘上的座椅上形成的超声波传感器以及对所述超声波传感器以及旋转电机进行控制的控制部的电动旋转装置的控制方法,所述电动旋转控制方法,包括:通过所述插闩部解除适用于所述座椅的锁定的步骤;根据所述车辆的状态驱动或停止所述旋转电机的步骤;以及,通过所述超声波传感器对所述座椅周围进行检测的步骤;在所述超声波传感器检测到物体或人时,所述控制部可以停止所述旋转电机或输出声音或光线。
16.此外,当发生所述超声波传感器的测定错误时,所述控制部可以通过对所述旋转电机的电流或霍尔传感器波形进行分析而在所述座椅的旋转过程中对碰撞与否进行确认。
17.此外,所述上盘的内侧一部分可以向下部延长而形成环形的第一倾斜面,而所述下盘的外侧以及内侧之间可以凹陷而在所述第一倾斜面的下部形成与所述第一倾斜面平行的环形的第二倾斜面,所述中盘的内部一侧可以向中央以及下部延长而形成环形的第三倾斜面,而外侧可以在所述下盘的外侧与所述导向器结合,所述第1轴承部可以以分别围绕配置在所述第一倾斜面以及所述上盘的外侧下部的第一球并与所述第一球结合的环状形态形成。
18.此外,电动旋转装置,还可以包括:第二轴承部,在所述中盘以及下盘之间以围绕第二球并将其彼此连接的方式形成,其中所述第二球在所述第三倾斜面以及所述中央盘的外侧下部以围绕所述第三中孔的方式配置。
19.此外,所述第二轴承部,可以包括:第三止动件,在所述第二倾斜面的上部围绕所述第二球;第四止动件,在所述中盘的外侧底面围绕所述第二球;以及,第二连接框架,环状形态的内侧与所述第三止动件结合,而外侧从内侧向外侧上部倾斜扩张延长并折曲而与所述第四止动件结合。
20.此外,所述第一轴承部,可以包括:第一止动件,在所述第一倾斜面的下部围绕所述第一球;第二止动件,在所述上盘的外侧底面围绕所述第一球;以及,第一连接框架,环状形态的内侧与所述第一止动件结合,而外侧从内侧向外侧上部倾斜扩张延长并折曲而与所述第二止动件结合。
21.此外,电动旋转装置,还可以包括:插闩部,以根据可转动地结合到所述上盘上的插杆的转动而将所述插杆的一部分插入到形成于所述中盘的外侧的通孔中或从所述通孔中分离的方式形成。
22.此外,控制部可以通过对在实时地对基于时间的电流值进行测定时所出现的凹凸结构的霍尔传感器波形进行分析而在相当于所述霍尔传感器波形的上端或下端的区间的时间宽度延长至相对较长的状态时停止旋转电机。
23.此外,控制部可以通过对基于时间的电流波形进行分析而在除特定的初期区间之外的剩余的电机工作区间内检测到相对较高的电流值增加时停止旋转电机。
24.在本说明书所公开的一实施例中,电动旋转装置可以通过配置在分别形成于上盘、中盘以及下盘上的倾斜面之间的环状形态的轴承部将分别在上盘、中盘以及下盘之间产生的晃动现象最小化。
25.此外,电动旋转装置可以通过安装在座椅上的超声波传感器在座椅旋转的过程中防止座椅发生碰撞,而且可以在与座椅发生碰撞的情况下自动停止座椅的旋转。
26.此外,电动旋转装置可以通过包括在形成于中盘上的倾斜面以及外侧面上下部围绕中孔的球以及围绕所述球的连接框架的轴承部稳定地对上盘以及座椅进行支撑。
27.而且,无论发明人认知与否,都可以通过所记载内容的构成自然地发挥出如上所述的本发明的效果,因此上述效果只是所记载内容的几个效果,并不能认定为发明人记载了已掌握或实际存在的所有效果。
28.此外,本发明的效果应该根据说明书的整体记载做出解释,即使是没有明确地通过文字进行记载,只要是具有所记载内容所属技术领域之一般知识的人员可以通过本说明书认定的效果,就应该认为本说明书已经记载了相应的效果。
附图说明
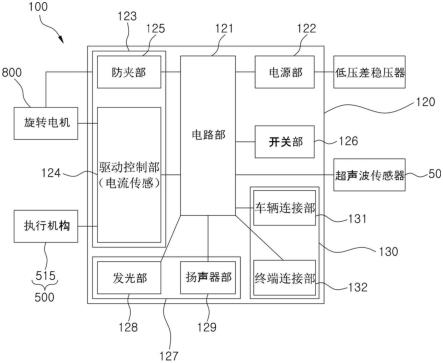
29.图1是适用本说明书所公开的实施例的电动旋转装置的块图。
30.图2是图1中的电动旋转装置的使用状态图。
31.图3是图1中的控制部所检测的霍尔传感器波形以及电流波形的图表。
32.图4是图1中的电动旋转装置的斜视图。
33.图5是图1中的电动旋转装置的分解斜视图。
34.图6是将图4中的电动旋转装置沿着i-i'进行切割的截面图以及放大图。
35.图7是图1中的电动旋转装置的轴承部的分解斜视图。
36.图8是从其他角度观察图1中的电动旋转装置的分解斜视图。
37.图9是适用本说明书所公开的实施例的电动旋转控制方法的流程图。
38.图10是图9中的电动旋转控制方法的顺序图。
具体实施方式
39.接下来,将参阅附图对适用较佳实施例的电动旋转装置的构成、动作以及作用效果进行说明。作为参考,在下述附图中,可能会为了说明的便利或明确性而对各个构成要素进行省略或概要性图示,并不是真实体现出了各个构成要素的实际大小。此外,在整个说明书中,相同的参考编号代表相同的构成要素,在部分附图中于相同构成要素相关的附图编号将被省略。
40.在图1中,对适用本说明书所公开的实施例的电动旋转装置的块图进行了图示。在图2中,对图1中的电动旋转装置的使用状态图进行了图示。
41.如图1以及图2所示,电动旋转装置100包括超声波传感器50、控制部120以及座椅转动部,所述座椅转动部包括上盘200、下盘300、中盘400、插闩部500、第一轴承部600、第二轴承部700以及旋转电机800。
42.通常来讲,安装在车辆内部的座椅可以通过旋转装置进行转动,而借助于座椅的转动,可以使得搭乘车辆的搭乘人员彼此相向而坐,从而提升在车辆内部的便利性。
43.最近通过配备于电动汽车、自动驾驶汽车以及露营车内部的便利装置,可供搭乘人员在车辆内部使用的便利配置也在随之增加,而伴随着如上所述的趋势,与通过变更座椅的位置而提升空间利用率相关的需求也在逐渐增加。
44.电动旋转装置100可以通过电力进行转动,而且可以在座椅各自转动时防止其发生碰撞,还可以通过与车辆状态联动地对座椅的转动进行控制而确保座椅根据车辆状态安全地进行转动。
45.超声波传感器50以有线或无线方式与控制部120连接,可以与周边温度或使用者的运动无关地对使用者或周边物体的存在与否进行准确检测,分别在座椅40的头枕两侧上端、座椅40的两侧下端以及座椅40的坐垫前方下部两侧形成。
46.在座椅40的两侧下端以及坐垫的前方下部两侧形成的超声波传感器50以朝向座椅40下部的拐角一侧方向的方式形成,从而在座椅40旋转的过程中对碰撞可能性较高的拐角周边的物体或人进行检测为宜。
47.附着到座椅40的不同位置上的超声波传感器50可以有效地对包括周边的人或座椅在内的物体进行检测,并在检测到接近各个超声波传感器50的物体或人时向控制部120传送检测信号。
48.只有在各个超声波传感器50检测到接近至不足50mm的检测距离的物体或人的情况下才使得超声波传感器50向控制部120传送检测信号为宜,而且所述检测距离可以根据车辆的大小或环境进行修改。
49.上盘200以矩形的板状形态形成,边缘一部分向下部折曲,而相当于拐角一侧的部分通过结合器件12结合到座椅40的下部。
50.下盘300以圆形的板状形态形成,相当于边缘内侧的环状形态的一部分向下部凹陷,在与上盘200结合时,相当于下盘300的凹陷部分的空间将借助于上盘200形成环状形态的空间。
51.中盘400以矩形的板状形态形成并结合到车辆上,形成有中孔,内侧面的一部分被配置在上盘200以及下盘300之间并通过第一以及第二轴承部600、700并以可将上下部轴为基准转动的方式与上盘200以及下盘300结合。
52.插闩部500包括执行机构515以及插杆530。
53.插闩部500结合到上盘200的上部一侧,在受到驱动时通过将一部分贯通到位于上盘200下部的中盘400而停止上盘200的旋转,或者通过从中盘400分离而转换成可使上盘200旋转的状态。
54.执行机构515与控制部120电性连接,可以在搭乘人员操作的开关驱动下驱动插杆530,从而使得插杆530的一部分贯通中盘400或从中盘400分离。
55.插杆530与执行机构515连接,从而在执行机构515的驱动下进行转动,并根据所述开关的操作贯通形成于中盘400上的通孔或从中盘400分离。
56.第一轴承部600以分别围绕第一球并对所述第一球进行连接的方式形成,所述第一球以相同的间隔配置在相当于上盘200以及中盘400之间的环状形态的空间内。
57.借此,第一轴承部600将以围绕所述第一球的一部分的环状形态形成,在上盘200
以向上部或下部延长的轴为基准旋转时,所述第一球将借助于所贴紧的上盘200的旋转进行转动。
58.第二轴承部700以分别围绕第二球并对所述第二球进行连接的方式形成,所述第二球以相同的间隔配置在相当于中盘400以及下盘300之间的环状形态的空间内。
59.借此,第二轴承部700将以围绕所述第二球的一部分的环状形态形成,在下盘300以向上部或下部延长的轴为基准旋转时,与下盘300的上部贴紧的所述第二球将进行转动。
60.旋转电机800通过附着到中盘400的底面的支架与中盘400结合,而且在中盘400的中央下部通过齿轮与形成于上盘200的中央底面的齿轮进行齿轮结合。
61.借此,在旋转电机800的驱动轴旋转并带动结合到上盘200底面的齿轮旋转时,上盘200以及下盘300也将随之旋转,从而使得座椅40向上盘200旋转的方向进行旋转。
62.座椅40的旋转方向将根据旋转电机800的驱动轴的旋转方向发生变更,在形成于座椅40上的超声波传感器50检测到周边的物体或人时,控制部120将停止驱动旋转电机800。
63.控制部120包括电路部121、电源部122、传感器部123、开关部126、输出部127以及通信部130。
64.控制部120可以结合到上盘200、座椅40或车辆上,而且可以通过与超声波传感器50、执行机构515以及旋转模块800连接而接收超声波传感器50的检测信号或对执行机构515或旋转电机800的驱动进行控制。
65.此外,控制部120可以通过有线或无线方式与车辆连接并对包括车速、齿轮状态、车门开闭状态、所供应的电源状态、接近车辆周边的物体的检测状态、接近车辆周边的人的检测状态、车辆的油门踏板工作状态以及车辆的制动器工作状态在内的各种车辆信息进行分析,从而对执行机构515或旋转电机800的驱动进行控制。
66.例如,控制部120可以在车辆的速度达到一定速度以上的情况下,停止驱动执行机构515或旋转电机800,从而防止搭乘人员在高速行驶的车辆内部摔倒受伤。
67.此外,控制部120可以在车门打开时通过对执行机构515以及旋转电机800进行控制而使得座椅40的坐垫朝向外部,以便于搭乘人员方便地上下车。
68.此外,控制部120还可以通过对从车辆供应的电源状态进行分析而在电池容量过低或电力状态不稳定的情况下停止执行机构515或旋转电机800,从而防止座椅40的不完全旋转。
69.此外,控制部120还可以在通过附着到车辆上的传感器检测到接近至车辆周边的一定距离以上的物体时为了应对碰撞而停止执行机构515或旋转电机800的驱动,从而在发生碰撞之前防止座椅40进行旋转。
70.此外,控制部120还可以在检测到车辆的油门踏板的工作状态时停止执行机构515或旋转电机800的驱动并借此在加速之前防止座椅40进行旋转,从而防止在加速情况下搭乘人员因为座椅40的旋转而面临危险状况。
71.此外,控制部120还可以对驾驶人或车辆做出的制动器工作状态进行检测,从而在制动器紧急制动时停止执行机构515或旋转电机800的驱动并借此防止座椅40在紧急制动的情况下发生不稳定的旋转。
72.电路部121由微控制单元(mcu:micro controller unit)构成,而且可以通过与传
感器部123、开关部126、输出部127以及通信部130分别连接而执行功能驱动所需要的演算。
73.电源部122可以通过与车辆的电源连接而向电路部121或控制部120供应电源,并通过低压差(low-dropout)稳压器防止过冲电压或浪涌电流的发生,从而防止电路部121的错误工作以及损坏。
74.传感器部123包括驱动控制部124以及防夹部125。
75.传感器部123与电路部121、执行机构515以及旋转电机800连接,可以对执行机构515以及旋转电机800的各个电流状态进行检测并将检测信号传送到电路部121,或将电路部121的控制信号传送到执行机构515或旋转电机800中的某一个。
76.驱动控制部124与电路部121、执行机构515以及旋转电机800连接,可以将从电路部121传送过来的控制信号传送至执行机构515或旋转电机800。
77.此外,驱动控制部124可以将执行机构515或旋转电机800的工作与否、工作状态、电压状态以及电流状态的检测信号实时地传递到电路部121。
78.防夹部125与电路部121以及旋转电机800连接,通过附着到旋转电机800的霍尔传感器实时地对电机的速度进行检测并将检测信号传递到电路部121,电路部121对旋转电机800的霍尔传感器波形以及速度相关检测信号进行分析。
79.电路部将对从防夹部125接收到的检测信号进行分析,在旋转电机800的速度状态与预先设定的状态之间存在差异时停止旋转电机800或驱动开关部126工作,从而通过将插杆530插入到中盘400而停止上盘200的旋转。
80.此外,电路部121还可以在旋转电机800的电流、霍尔传感器波形或速度中的某一个状态与预先设定的电流、霍尔传感器波形或速度之间存在差异时同时停止对旋转电机800以及上盘200的驱动。
81.开关部126与搭乘人员周围的安装在车辆上的开关以及电路部121连接,在因为驱动所述开关而接收到输入信号时将其传递到电路部121。
82.根据从开关部126传送过来的所述输入信号,电路部121将向驱动控制部124传送控制信号并通过驱动执行机构515以及旋转电机800而旋转座椅40。
83.此外,对从开关部126传送过来的所述输入信号进行分析的电路部121可以向驱动控制部124传送控制信号并驱动执行机构515或旋转电机800。
84.与开关部126连接的开关可以以按钮式形成,从而使得座椅40旋转60度、90度或180度中的某一个角度,电路部121可以在每次按下单个开关时向驱动控制部124以及防夹部125传递控制信号,使得座椅40的旋转角度增加至60度、90度以及180度。
85.输出部127包括发光部128以及扬声器部129。
86.输出部127与电路部121连接,电路部121可以在从传感器部123接收到与旋转电机800电流的急剧上升相关的检测信号或接收到与旋转电机800的速度异常相关的检测信号时,通过输出部127输出光线或声音,从而向周围的搭乘人员警告座椅40的碰撞或座椅40周边可能发生碰撞的物体的检测状态。
87.此外,电路部121还可以在通过超声波传感器50接收到与接近座椅40周边的物体或人相关的检测信号时,控制输出部127向搭乘人员输出光线或声音。
88.发光部128与电路部112连接并配置在座椅40的表面或下部,可以在电路部121通过超声波传感器50、防夹部125或驱动控制部124检测到碰撞危险或检测到旋转电机800的
异常状态时,借助于电路部121使得发光部128输出光线。
89.扬声器部129与电路部121连接并安装在座椅40的表面、下部或车辆上,可以在电路部121通过超声波传感器50、防夹部125或驱动控制部124检测到碰撞危险或检测到旋转电机800的异常状态时,借助于电路部121使得扬声器部129输出警告音。
90.搭乘人员可以通过扬声器部129感知到座椅40周边的物体或人,而且可以认知到当前处于座椅40的旋转因为与座椅40碰撞的物体而受到限制的状态。
91.通信部130包括车辆连接部131以及终端连接部132。
92.通信部130与电路部121电性连接,可以通过与车辆以及外部的终端无线连接而接收车辆或外部的终端的信号或向车辆或外部的终端传送信号。
93.搭乘人员可以使用形成于车辆上的按钮或安装在终端上的程序,通过通信部130对控制部120进行控制,还可以通过所连接的终端对座椅40的旋转进行控制。
94.*具体来讲,车辆连接部131可以与电路部121电性连接,并通过有线或无线方式与车辆的电子控制装置(ecu:electronic control unit)连接,搭乘人员可以通过车辆上的按钮或开关对电路部121进行控制或对设定进行变更。
95.终端连接部132可以通过无线方式与搭乘人员所持有的的终端或位于远程的终端连接,搭乘人员或位于远程的使用者可以通过终端连接部132以及终端对电路部121进行控制,而相邻的终端可以通过有线方式进行连接。
96.在图3中,对图1中的控制部所检测的霍尔传感器波形以及电流波形的图表进行了图示。
97.参阅图3,控制部120可以分别通过驱动控制部124以及防夹部125实时地对电流以及霍尔传感器进行测定,从而分别对如x轴为时间(sec)且y轴为电流(a)的图表所图示的电流波形141以及霍尔传感器波形140进行检测。
98.在霍尔传感器波形140以及电流波形141中,将分别从旋转电机800驱动时开始伴随着时间的流逝依次出现浪涌区间(inrush)142、电流稳定化区间143以及电机工作区间144。
99.在座椅40在旋转电机800的驱动下旋转的过程中,当座椅40的转动因为与相邻的座椅、搭乘人员或事物中的某一个发生干涉而受到限制时,电流波形141以及霍尔传感器波形140将进入干涉区间145。
100.在干涉区间145中,电流波形141的电流将增加至与电机工作区间144的电流的正常电流平均值相比相对较高的防夹水平147,而在特定时间区间内的电流波形141的电流与所述正常电流平均值相比相对增加3a时,电路部121将判定为干涉区间145。
101.在干涉区间145内,霍尔传感器波形140的霍尔脉冲上升区间146的干涉时间的大小与电机工作区间144的霍尔脉冲上升区间146的正常时间的大小的正常时间平均值相比将相对大幅增加。
102.具体来讲,霍尔传感器波形140是以沿着时间(msec)轴延长的凹凸结构的形态形成,而在干涉区间145内,位于相当于与霍尔传感器波形140中相对较高值的电流值上的霍尔脉冲上升区间146的时间宽度将延长至相对较长的状态。
103.此外,在座椅40的转动限制时间变长的情况下,干涉区间145也将相对变长,此时不仅是霍尔脉冲上升区间146,相当于与霍尔脉冲上升区间146相邻的位置的具有相对较低
的电流值的霍尔脉冲下部区间的时间宽度也将延长至相对较长的状态。
104.电路部121可以在特定时间区间内的霍尔脉冲上升区间146的干涉时间与所述正常时间平均值相比相对增加50msec(从正常值即500msec增加至550msec)的情况下判定为干涉区间145。
105.借此,电路部121可以通过对电流波形141中的电流值或霍尔传感器波形140中的霍尔脉冲上升区间146的时间进行分析而判定旋转电机800的旋转是否受到了阻碍。
106.此外,电路部121可以在通过对电流波形141中的电流值或霍尔传感器波形140中的霍尔脉冲上升区间146的时间进行分析而判定旋转电机800的旋转受到了阻碍的情况下,停止驱动旋转电机800并通过输出部127输出声音以及光线。
107.在图4中,对图1中的电动旋转装置的斜视图进行了图示。在图5中,对图1中的电动旋转装置的分解斜视图进行了图示。在图6中,对将图4中的电动旋转装置沿着i-i'进行切割的截面图以及放大图进行了图示。
108.如图4至图6所示,所述座椅转动部包括上盘200、下盘300、中盘400、支架452、插闩部500、第一轴承部600、第二轴承部700、旋转电机800以及齿轮连接部800。
109.所述座椅转动部可以通过配置在上盘200、下盘300以及中盘400之间的第一以及第二轴承部600、700将分别在上盘200、中盘400以及下盘300之间产生的晃动现象最小化。
110.具体来讲,上盘200以形成有中孔的矩形板状形态形成,与所述中孔相邻的内侧边缘一部分向下部以环状形态凹陷,从而在内侧边缘以及外侧面之间形成以环状形态向所述中孔倾斜延长的第一倾斜面220。
111.在与上盘200的底面拐角相邻的位置上,滑动部240以可将形成于中盘400的拐角上的导向器342以及从上盘200中央向上下部延长的中心轴为基准转动的方式结合。
112.具体来讲,参阅图5,滑动部240的上侧部以圆弧形态折曲的板状形态形成并结合到上盘200的外侧底面,而下侧部中与上盘200的中孔相邻的一部分向下部折曲。
113.滑动部240的下侧部末端一部分以在向上盘200的外侧折曲之后重新向上部折曲的钩子形态形成,并与后续说明的导向器342的上侧部末端以相互分离的状态彼此咬合。
114.导向器342的下侧部以向下盘300的外侧折曲的圆弧形的板状形态形成,从而在滑动部240的正下方结合到下盘300的上部面。
115.与下盘300的外侧相邻的导向器342的上侧部一部分在向上部折曲并延长之后,其末端向上盘200的中央延长,而且其一部分向下部折曲,从而以与滑动部240的下侧部末端分离的状态彼此咬合的钩子形态形成。
116.借此,滑动部240以及导向器342为彼此咬合的形态,并以可将电动旋转装置100的中心轴为基准转动的方式结合,从而对上盘200以及下盘300的滑动移动进行导向。
117.此外,滑动部240以及导向器342彼此咬合的结构,可以在因为受到强烈的外力作用而导致结合器件10分离且上盘200向上部或外侧分离的情况下防止上盘200与中盘400分离。
118.在第一倾斜面200的内侧中与上盘200的中孔相邻的位置上形成围绕上盘200的中孔的第一结合面230,第一结合面230以环形的板状形态形成并与下盘300的第二结合面340面结合。
119.齿轮252以在上盘200的中央底面围绕形成于上盘200上的中孔的圆筒形态形成,
在外侧以向上下部较长延长的杆状形态沿着齿轮252的外侧面相距一定的间隔配置有多个齿轮齿。
120.支架452以向一侧或另一侧较长延长的板状形态形成,且其一侧部以及另一侧部的一部分在与插闩部500以及控制部120不同的垂直线上向上部折曲并结合到上盘200的底面。
121.支架452的中央部以与齿轮252相距一定间隔的方式配置在齿轮252的下部,旋转电机800结合到支架452的中央部底面,并通过齿轮连接部805与齿轮252进行齿轮连接。
122.支架452的延长方向以与对插闩部500以及控制部120所处的一侧进行连接的延长线垂直的方式形成。
123.齿轮连接部805在与旋转电机800的驱动轴连接的状态下结合到支架452上,而且相当于其一部分的转动轴在贯通支架452并向上部延长之后结合到与齿轮252齿合的小齿轮的中央底面。
124.借此,在旋转电机800受到驱动时,齿轮连接部805的转动轴以及所述小齿轮将旋转并带动齿轮252进行旋转,此时上盘200以及下盘300也将随之旋转并带动座椅40进行旋转。
125.下盘300包括第二倾斜面320、第四倾斜面330、第二结合面340以及第二支撑面350。
126.下盘300以在上盘200的下部围绕第二中孔4的圆形的板状形态形成,外侧以及内侧之间的一部分向下部凹陷,从而形成其截面向第二中孔4的下部倾斜延长的环状形态的第二倾斜面320。
127.下盘300的外侧以及内侧之间的一部分向下部凹陷,从而在第二倾斜面320的内侧形成与第二倾斜面320连接的第四倾斜面330,第四倾斜面330以其截面向第二中孔4以及上部倾斜延长的环形的板状形态形成。
128.第二结合面340以在第四倾斜面330的内侧围绕第二中孔4的环形的板状形态形成,第二结合面340的上部面通过结合器件10与第一结合面230的底面面结合。
129.第二支撑面350在下盘300的边缘一侧形成于第二倾斜面320的外侧,并通过以环形的板状形态形成而对第二轴承部700的外侧下部进行支撑。
130.中盘400包括第三倾斜面420、第三倾斜面430、折曲面440以及外侧面450。
131.中盘400以在上盘200以及下盘300之间围绕圆形的第三中孔3的矩形板状形态形成,圆形的内侧一部分折曲,从而形成截面向第三中孔3以及下部倾斜延长的环形的第三倾斜面420。
132.第三倾斜面420的外侧形成于第三倾斜面420连接并围绕第三倾斜面420的环形的板状形态的第三支撑面430,第三支撑面430配置在第二支撑面350的正上方。
133.折曲面440以从第三支撑面430的外侧向下部折曲以及延长的圆筒形态形成,而且沿着折曲面440在相同的水平线上相距一定的间隔形成对折曲面440的外侧以及内侧进行连接的多个通孔442。
134.外侧面450以围绕折曲面440的外侧的环状形态形成并与折曲面440连接,而且外侧面450的边缘一部分向上部折曲以及延长并配置在与上盘200的外侧边缘相距一定间隔的位置上。
135.借此,通过结合器件10彼此结合的上盘200以及下盘300可以在结合到座椅40的底面上的上盘200旋转时随之一起旋转,而当后续说明的插闩部500的一部分被插入到形成于折曲面440上的通孔442时,上盘200以及下盘300将停止旋转。
136.插闩部500包括支撑板510、执行机构(actuator)515、凸缘520、铰链轴525以及插杆530。
137.在执行机构515的驱动下,插闩部500中的叉子形态的一部分将插入到形成于下盘300的外侧的通孔442中或从通孔442分离。
138.具体来讲,参阅图4至图6,支撑板410以矩形板状形态形成并结合到上盘200的外侧边缘一侧的上部面,在一侧形成有矩形形态的插闩部通孔,所述插闩部通孔与以矩形形态向上下部贯通上盘200的外侧而形成的通孔20连接。
139.通孔20在相当于在中盘400上形成的通孔442的上部的位置上形成,而且借助于通孔20,可以开放相当于上盘200的上部的外部空间和相当于上盘200以及中盘400之间的空间。
140.执行机构515配置在支撑板510的另一侧上部,而且执行结构515的转动轴与贯通插杆530的上端的铰链轴525连接,从而使得铰链轴525可以在执行机构515的驱动下进行转动。
141.参阅图4以及图6,各个凸缘520的一端以彼此相向的方式结合到相当于通孔20上部的第一方向21以及第二方向22一侧的支撑板510上,而另一端向上部以板状形态延长并以相向的表面彼此平行的方式形成。
142.铰链轴525的一端从第一方向21一侧贯通凸缘520并与执行机构515的转动轴结合,另一端向第二方向22延长且可转动地与第二方向22一侧凸缘520结合,而插杆540的另一端在凸缘520之间与铰链轴525结合。
143.插杆430的一端形成有多个叉子并插入到通孔442中,而另一端在从一端向上部折曲之后以平板形态延长,从而在穿过通孔20以及所述插闩部通孔之后与铰链轴525结合。
144.在插杆530的叉子与中盘400分离的状态下,座椅40、上盘200以及下盘300可以转动,而在铰链轴525在执行机构515的驱动下进行旋转时,所述叉子将移动到原来的位置并插入到通孔442中。
145.此外,通孔442可以沿着折曲面440的表面以相距一定间隔的方式在折曲面440的表面追加形成,在如上所述的情况下,可以增加在上盘200以及下盘300旋转之后稳定地进行固定的角度范围。
146.在图7中,对图1中的电动旋转装置的轴承部的分解斜视图进行了图示。在图8中,对从其他角度观察图1中的电动旋转装置的分解斜视图进行了图示。
147.如图7以及图8所示,第一轴承部600包括第一连接框架610、第一止动件620、第一球625、第二止动件630以及第一球635。
148.第一连接框架610整体上以围绕通孔5的环形的板状形态形成,其截面以拱形形态折曲,从而以上部面向通孔5以及上部凸出而底面向通孔5以及上部凹陷的形态形成。
149.即,第一连接框架610的内侧部以环形的板状形态形成,从而以上部面朝向通孔5以及上部的倾斜的截面形成,而外侧部以在从内侧部向外侧折曲之后扩展延长并围绕内侧的环形的板状形态形成。
150.参阅图5至图8,第一止动件620的一端在第一倾斜面220的下部结合到第一连接框架610的内侧,而另一端向通孔5以及下部倾斜缩小延长并以围绕第一球625的一部分的方式形成。
151.第二止动件630的一端结合到相当于第一止动件620的外侧的第一连接框架610的外侧,而另一端在上盘200以及中盘400之间向外侧缩小延长并以围绕第一球635的一部分的方式形成。
152.参阅图6以及图7,各个第一球625、635的上部以及下部分别贴紧到上盘200的底面以及中盘400的上部面,并在上盘200以及下盘300旋转时随之一起进行旋转,从而稳定地维持上盘200以及中盘400之间的距离。
153.此外,各个第一球635以及第二止动件630可以在彼此结合的状态下稳定地维持上盘200以及中盘400的上下部距离,从而防止上盘200以及中盘400向上下部晃动。
154.此外,各个第一球625以及第一止动件620可以在彼此结合的状态下稳定地维持第一倾斜面220以及第三倾斜面420之间的距离,从而防止上盘200或中盘400向左右晃动。
155.第二轴承部700包括第二连接框架710、第三止动件720、第二球725、第四止动件730以及第二球735。
156.第二连接框架710整体上以围绕通孔5的环形的板状形态形成,其截面以拱形形态折曲,从而以上部面向通孔5以及上部倾斜凸出而底面向通孔5以及上部凹陷的形态形成。
157.即,第二连接框架710的内侧部以环形的板状形态形成,从而以上部面朝向通孔5以及上部的倾斜形成,而外侧部以在从内侧向外侧折曲之后扩展延长并围绕内侧的环形的板状形态形成。
158.参阅图5至图7,第三止动件720的一端在第三倾斜面420的下部结合到第二连接框架710的内侧,而另一端向通孔5以及下部倾斜缩小延长并以围绕第二球725的方式形成。
159.第四止动件730的一端结合到相当于第三止动件720的外侧的第二连接框架710的外侧,而另一端在中盘400以及第二支撑面350之间向第二中盘400的外侧缩小延长并以围绕第二球735的方式形成。
160.各个第二球725、735的上部以及下部分别贴紧到中盘400的底面以及下盘300的上部面,并在上盘200以及下盘300旋转时随之一起进行旋转,从而稳定地维持中盘400以及下盘300之间的距离。
161.此外,各个第二球735以及第四止动件730可以在彼此结合的状态下稳定地维持中盘400以及下盘300的上下部距离,从而防止中盘400以及下盘300向上下部晃动。
162.此外,各个第二球725以及第三止动件720可以在彼此结合的状态下稳定地维持第三倾斜面420以及第二倾斜面320之间的距离,从而防止上盘200或中盘400向左右晃动。
163.参阅图8,齿轮252以在上盘200的中央底面围绕形成于上盘200上的中孔的圆筒形态形成,在外侧以向上下部较长延长的杆状形态沿着齿轮252的外侧面相距一定的间隔配置有多个齿轮齿。
164.支架452以向一侧或另一侧较长延长的板状形态形成,且其一侧部以及另一侧部的一部分在与插闩部500以及控制部120不同的垂直线上向上部折曲并结合到上盘200的底面。
165.支架452的中央部以与齿轮252相距一定间隔的方式配置在齿轮252的下部,旋转
电机800结合到支架452的中央部底面,并通过齿轮连接部805与齿轮252进行齿轮连接。
166.齿轮连接部805在与旋转电机800的驱动轴连接的状态下结合到支架452上,而且相当于其一部分的转动轴在贯通支架452并向上部延长之后结合到与齿轮252齿合的小齿轮的中央底面。
167.借此,在旋转电机800受到驱动时,齿轮连接部805的转动轴以及所述小齿轮将转动并带动齿轮252进行转动,此时上盘200以及下盘300也将随之转动并带动座椅40进行旋转。
168.在图9中,对适用本说明书所公开的实施例的电动旋转控制方法的流程图进行了图示。在图10中,对图9中的电动旋转控制方法的顺序图进行了图示。
169.如图9所示,在步骤310中,当搭乘人员或远程使用者对通过通信部130连接的车辆上的按钮、终端或开关部126中的某一个进行控制时,用于驱动旋转电机800的输入信号将被传送到电路部121。
170.在步骤311中,当电路部121接收到所述输入信号时,将对包括供应到座椅40上的电源、车速、齿轮状态、车门开闭状态、所供应的电源状态、接近车辆周边的物体的检测状态、接近车辆周边的人的检测状态、车辆的油门踏板工作状态以及车辆的制动器工作状态在内的车辆信息进行分析。
171.在步骤312中,电路部121可以在供应到座椅40上的电源为一定电压或电流以上、车门被打开、车辆速度为一定速度以下、齿轮状态处于空挡或驻车状态、没有检测到接近车辆周边的物体、没有检测到接近车辆周边的人、车辆的油门踏板没有工作或车辆的制动器没有工作的某一种情况下,通过驱动旋转电机800而旋转座椅40。
172.此外,在步骤312中,电路部121可以在同时满足供应到座椅40上的电源为一定电压或电流以上、车门被打开、车辆速度为一定速度以下、齿轮状态处于空挡或驻车状态、没有检测到接近车辆周边的物体、没有检测到接近车辆周边的人、车辆的油门踏板没有工作以及车辆的制动器没有工作的情况下,通过驱动旋转电机800而旋转座椅40。
173.在步骤313中,当旋转电机800得到驱动而开始旋转座椅40时,超声波传感器50也将实时工作,从而检测座椅40周边的物体或人是否位于相当于一定距离以下的位置上。
174.在步骤314中,在座椅40旋转的期间内,当附着到座椅40上的超声波传感器50没有从各个超声波传感器50所处位置的50mm的距离之内检测到物体或人时,将维持旋转电机800的驱动并正常旋转座椅40。
175.在步骤315中,在座椅40旋转的期间内,当附着到座椅40上的超声波传感器50从各个超声波传感器50所处位置的50mm的距离之内检测到物体或人时,将停止旋转电机800的驱动以及座椅40的旋转。
176.在步骤316中,当旋转电机800以及座椅40的旋转停止时,可以使得发光部128以及扬声器部129同时输出光线以及声音,或使得发光部128或扬声器部129中的某一个开始输出,从而警告座椅40周边的物体或人可能会发生碰撞。
177.在步骤316中,在一定的时间内持续通过发光部128或扬声器部129输出警告之后,将停止发光部128或扬声器部129的驱动,而在想搭乘人员的警报状态终止之后,将重新从开关输入步骤310开始执行。
178.在步骤317中,在座椅40旋转的期间内,当在附着到座椅40上的超声波传感器50发
生错误时,驱动控制部124将对旋转电机800的电流进行检测,且防夹部125将对旋转电机800的霍尔传感器波形140以及速度进行检测,并将所检测到的信息传送到电路部121。
179.在步骤318中,电路部121将对所接收到的旋转电机800的电流值、霍尔传感器波形140以及速度进行分析,从而判定是否需要停止旋转电机800或维持旋转电机800的驱动。
180.在步骤319中,电路部121将对所接收到的旋转电机800的电流值以及速度进行分析,从而在所述电流值与预先设定的正常电流值相比相对较高或旋转电机800的速度不足预先设定的正常速度的情况下,判定为座椅40发生了碰撞并停止旋转电机800。
181.在步骤319中,电路部121将对所接收到的旋转电机800的霍尔传感器波形140进行分析,从而在旋转电机800的霍尔传感器波形为与预先设定的霍尔传感器波形不同的不正常波形的情况下,判定为座椅40发生了碰撞并停止旋转电机800。
182.在步骤314中,电路部121将对所接收到的旋转电机800的电流以及速度进行分析,从而在所述电流值为小于正常电流水准的值或旋转电机800的速度为预先设定的正常速度以上的情况下,判定为座椅40的旋转没有收到阻碍并维持旋转电机800的驱动。
183.此外,在步骤314中,电路部121将对所接收到的旋转电机800的霍尔传感器波形140进行分析,从而在所述霍尔传感器波形140为与预先设定的霍尔传感器波形140相同的正常波形的情况下,判定为座椅40的旋转没有收到阻碍并维持旋转电机800的驱动。
184.如图10(a)所示,在电动旋转控制方法的步骤411中,可以通过对车辆上的按钮或终端进行控制而驱动执行机构515工作,从而解除用于停止座椅40旋转的锁定状态。
185.在步骤412中,在解除座椅40锁定的状态下,电路部40可以在满足供应到座椅40上的电源为一定电压或电流以上、车门被打开、车辆速度为一定速度以下、齿轮状态处于空挡或驻车状态、没有检测到接近车辆周边的物体、没有检测到接近车辆周边的人、车辆的油门踏板没有工作或车辆的制动器没有工作的某一个条件时,通过驱动旋转电机800而旋转座椅40。
186.此外,在步骤412中,在解除座椅40锁定的状态下,电路部40可以在满足供应到座椅40上的电源为一定电压或电流以上、车门被打开、车辆速度为一定速度以下、齿轮状态处于空挡或驻车状态、没有检测到接近车辆周边的物体、没有检测到接近车辆周边的人、车辆的油门踏板没有工作或车辆的制动器没有工作的两个以上的条件时,通过驱动旋转电机800而旋转座椅40。
187.此外,在步骤412中,在解除座椅40锁定的状态下,电路部40可以在同时满足供应到座椅40上的电源为一定电压或电流以上、车辆速度为一定速度以下、齿轮状态处于空挡或驻车状态、没有检测到接近车辆周边的物体、没有检测到接近车辆周边的人、车辆的油门踏板没有工作以及车辆的制动器没有工作的全部条件时,通过驱动旋转电机800而旋转座椅40。
188.在步骤413中,在旋转电机800开始驱动之后,超声波传感器50将对所旋转的座椅40周边的物体或人进行检测并实时地将检测信号传送至电路部121。
189.在步骤414中,当超声波传感器50中的某一个在座椅40周边检测到物体或人时,将停止旋转电机800或分别通过发光部128以及扬声器部129输出光线以及声音。
190.在步骤415中,当超声波传感器50中的某一个或一部分发生测定错误时,电路部121将接收旋转电机800的电流、霍尔传感器波形140以及速度值并对座椅40的碰撞与否进
行分析。
191.借此,电动旋转控制方法可以在座椅40旋转之前掌握车辆的状态并驱动旋转电机800,并通过超声波传感器50掌握周边的障碍物并借此防止物体破损或人体受伤。
192.在上述内容中参阅附图对本发明的较佳实施例进行了说明,但是本说明书中记载的实施例以及附图中所图示的构成知识本发明的最较佳的一实施例,并不能代表本发明的所有技术思想,因此应该理解在本技术的时间点上可能会有可替代的其他均等物以及变形例。因此,在上述内容中记述的实施例在所有方面只应该理解为是示例性目的而非限定,本发明的范围应通过所附的权利要求书做出定义而非详细的说明,而且从权利要求书的含义和范围及其等价概念推导出的所有变更或变形形态都应该解释为包含在本发明的范围之内。
193.(附图标记的说明)
194.100:电动旋转装置
195.200:上盘
196.300:下盘
197.400:中盘
198.500:插闩部
199.600:第一轴承部
200.700:第二轴承部
201.800:旋转电机
202.(产业上的可利用性)
203.电动旋转装置为座椅用转动装置,可以作为产业用或家庭用用途使用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1