一种车辆行驶状态自适应的紧急制动控制系统
1.本发明涉及安全驾驶技术领域,具体涉及一种车辆行驶状态自适应的紧急制动控制系统。
背景技术:
2.自动紧急制动(autonomous emergency braking,aeb)技术通过自动控制制动器实现主动紧急制动来避免车辆碰撞或降低碰撞的冲击程度,是提高车辆行驶安全性的重要手段之一,目前已经在车辆上得到了广泛应用。
3.目前,aeb技术主要采用的是基于安全行车车距和碰撞发生时间(time to collision,ttc)的避撞策略。ttc本身就是碰撞发生的时间余量,可以直观反映出发生碰撞危险的紧急程度,但安全行车车距在评估碰撞风险上存在不足,包括:
4.(1)路面摩擦系数是影响制动距离的主要因素之一,但现有技术并没有将路面摩擦系数融入到aeb控制模型中去,在极端情况下存在无法有效避免碰撞或降低碰撞程度的可能性。
5.(2)aeb系统的敏感度和驾驶舒适度之间存在不可调和的矛盾,现有技术主要通过标定环节确定相应的控制参数,其参数一般是固化的,需要通过重新标定才可以修改。因此对复杂多变的行驶环境显得适应性不够。
技术实现要素:
6.发明目的:为了克服现有技术的不足,本发明提供车辆行驶状态自适应的紧急制动控制系统,该系统可以解决现有技术的安全性、鲁棒性和适用性低的问题。
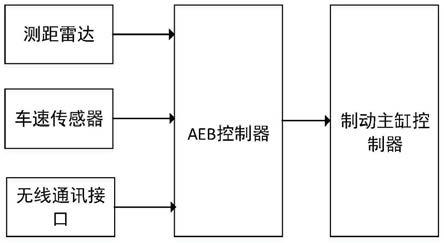
7.技术方案:本发明所述的车辆行驶状态自适应的紧急制动控制系统,该系统包括:车速传感器、测距雷达、aeb控制器和制动主缸控制器,所述测距雷达用于实时检测本车与前车的车距以及前车的车速,所述车速传感器用于检测本车的实时车速,所述aeb控制器根据测距雷达和车速传感器采集的数据计算碰撞发生时间ttc,并依据三级制动控制方法使制动主缸控制器控制整个紧急制动;
8.所述三级制动控制方法为:
9.第一制动阶段定义为:若此刻的碰撞发生时间ttc满足:ttc
th1
≤ttc<ttc
th
,则车辆制动主缸的制动压力bkp=bp1*bpk;
10.第二制动阶段定义为:若此刻的碰撞发生时间ttc满足:ttc
th2
≤ttc<ttc
th1
,则车辆制动主缸的制动压力bkp=bp2*bpk;
11.第三制动阶段定义为:若此刻的碰撞发生时间ttc满足:ttc<ttc
th2
,则车辆制动主缸的制动压力bkp=bpk;
12.其中,ttc
th
为第一时间阈值,定义为:
[0013][0014]
ttc
th1
为第二时间阈值,定义为:
[0015][0016]
ttc
th2
为第三时间阈值,定义为:
[0017][0018]
bp1和bp2为车辆的制动缸压力,且v
e
为本车当前的车速,μ为实际道路摩擦系数,α为车辆理想路面的最大制动减速度。
[0019]
进一步的,包括:
[0020]
所述碰撞发生时间ttc表示为:
[0021][0022]
其中,d
r
为前车与本车之间的距离,d
s
为前车与本车之间的最小安全距离,v
r
=v
l
‑
v
e
,a
r
=a
l
‑
a
e
,v
l
,a
l
为前车的实时车速和加速度,v
e
,a
e
为本车的实时车速和加速度。
[0023]
进一步的,包括:
[0024]
所述压力参数bp1定义为:
[0025][0026]
其中,v1
min
为本车的最小车速,v1
max
为本车的最大车速,[bp1
min
,bp1
max
]为车辆的制动缸压力固有参数值。
[0027]
进一步的,包括:
[0028]
该系统还包括无线通讯接口,其用于接收车载设备发送的路面摩擦系数,并发送给所述aeb控制器。
[0029]
进一步的,包括:
[0030]
还包括依据性能评价指标对该系统进行仿真实验,所述性能评价指标包括:
[0031]
安全性sa:紧急制动控制期间本车与前车的最小车距;
[0032]
制动敏感度sd:前车开始制动时刻t
lead
与本车的开始制动时刻t
ego
的差值,即:
[0033]
sd=t
ego
‑
t
lead
,该值越小表明制动敏感度越高;
[0034]
制动平稳性cd:本车在紧急制动控制期间的减速度标准差,即:
[0035]
该值越小,表明系统制动舒适度越好。
[0036]
有益效果:本发明与现有技术相比,其显著优点是:1、该系统引入路面摩擦系数并参与ttc的计算,优化aeb系统在不同路面条件下避免碰撞和降低碰撞程度的能力,提高了有效性和鲁棒性;2、该系统中的阈值计算法能够在车辆制动阶段中根据车速值动态调整ttc阈值和制动力的大小,使得车辆在高速状态或者前车急减速状态下提高abe系统的灵敏度,以获得较好的安全性;而在低速状态或者前车缓减速状态下降低aeb的灵敏度,在提高安全性的前提下降低系统介入的时机,以降低对车辆驾驶舒适度的影响。
附图说明
[0037]
图1为本发明所述的系统的结构示意图;
[0038]
图2为路面摩擦系数为0.9,aeb系统工作时本车与前车的实时距离变化过程示意图;
[0039]
图3为路面摩擦系数为0.9,aeb系统工作时本车与前车的实时车速变化过程示意图;
[0040]
图4为路面摩擦系数为0.6,aeb系统工作时本车与前车的实时距离变化过程示意图;
[0041]
图5为路面摩擦系数为0.6,aeb系统工作时本车与前车的实时车速变化过程示意图;
[0042]
图6为路面摩擦系数为0.4,aeb系统工作时本车与前车的实时距离变化过程示意图;
[0043]
图7为路面摩擦系数为0.4,aeb系统工作时本车与前车的实时车速变化过程示意图;
具体实施方式
[0044]
下面结合附图和实施例对本发明做进一步详细说明。
[0045]
本发明所述的车辆行驶状态自适应的紧急制动控制系统,该系统引入路面摩擦系数参与ttc的计算,通过对ttc阈值和制动压力的动态调整来调节aeb系统的敏感度以及驾驶舒适度,达到提高aeb系统的安全性、鲁棒性和适用性的目的。
[0046]
具体的,本发明的实施例中,该系统包括:车速传感器、测距雷达、aeb控制器、制动主缸控制器和无线通讯接口,无线通讯接口用于接收车载设备发送的路面摩擦系数,并发送给aeb控制器,测距雷达实时检测200米范围内本车与前车的车距以及前车的车速,车速传感器检测本车的实时车速,aeb控制器根据测距雷达和车速传感器采集的数据计算碰撞发生时间ttc,并依据三级制动控制方法使制动主缸控制器控制整个紧急制动。
[0047]
现有技术中,ttc阈值一般基于碰撞事故样本数据和主观经验获得,但该类方法没
有考虑车辆状态(性能参数、承载、驾驶状态等)和路面摩擦系数的必然差异性,进而影响了ttc阈值的普适性。
[0048]
在本发明的实施例中,在ttc中引入了最小安全距离参数,增加了系统的作用时间提前量,进而提高了系统的鲁棒性和适用性。
[0049]
碰撞发生时间ttc表示为:
[0050][0051]
其中,d
r
为前车与本车之间的距离,d
s
为前车与本车之间的最小安全距离,距离单位为m,v
r
=v
l
‑
v
e
,a
r
=a
l
‑
a
e
,v
l
,a
l
为前车的实时车速和加速度,v
e
,a
e
为本车的实时车速和加速度,速度单位为m/s,加速度单位为m/s2。
[0052]
在本发明的实施例中,ttc
th
为ttc的第一时间阈值,定义为:
[0053][0054]
ttc
th1
为ttc的第二时间阈值,定义为:
[0055][0056]
ttc
th2
为ttc的第三时间阈值,定义为:
[0057][0058]
bp1和bp2为车辆的制动缸压力,且v
e
为本车当前的车速,μ为实际道路摩擦系数,α为车辆理想路面的最大制动减速度。
[0059]
在本发明的实施例中,压力参数bp1定义为:
[0060][0061]
其中,v1
min
为本车的最小车速,v1
max
为本车的最大车速,[bp1
min
,bp1
max
]为车辆的制动缸压力固有参数值。
[0062]
经过上述的描述,在本发明的实施例中,三级制动控制方法为:
[0063]
第一制动阶段定义为:若此刻的碰撞发生时间ttc满足:ttc
th1
≤ttc<ttc
th
,则车辆制动主缸的制动压力bkp=bp1*bpk;
[0064]
第二制动阶段定义为:若此刻的碰撞发生时间ttc满足:ttc
th2
≤ttc<ttc
th1
,则车辆制动主缸的制动压力bkp=bp2*bpk;
[0065]
第三制动阶段定义为:若此刻的碰撞发生时间ttc满足:ttc<ttc
th2
,则车辆制动主缸的制动压力bkp=bpk。
[0066]
经过上述阈值的计算,能够在车辆制动阶段中根据车速值动态调整ttc阈值和制动力的大小,使得车辆在高速状态或者前车急减速状态下提高abe系统的灵敏度,以获得较好的安全性;而在低速状态或者前车缓减速状态下降低aeb的灵敏度,在提高安全性的前提下降低系统介入的时机,以降低对车辆驾驶舒适度的影响。
[0067]
考虑到安全性和经济性,在carsim和matlab/simulink环境下对上述方法进行仿真实验,本发明的控制方法称之为da
‑
aeb方法,仿真物理实验环境由lead前车和ego本车组成,行驶道路为直道。
[0068]
本发明的实施例中,依据性能评价指标对该系统进行仿真实验,性能评价指标包括:
[0069]
安全性sa:紧急制动控制期间本车与前车的最小车距;
[0070]
制动敏感度sd:前车开始制动时刻t
lead
与本车的开始制动时刻t
ego
的差值,即:
[0071]
sd=t
ego
‑
t
lead
,该值越小表明制动敏感度越高;
[0072]
制动平稳性cd:本车在紧急制动控制期间的减速度标准差,即:
[0073]
该值越小,表明系统制动舒适度越好。
[0074]
实验过程及结果:
[0075]
首先,预设参数:lead车50km/h减速至0,减速度为
‑
6m/s,,ego车初始车速为50km/h。
[0076]
(1)设路面摩擦系数为0.9,如图2和3为aeb系统传感器数据,如图2为距离示意图,且ego与lead车的距离逐渐变小,图3为车速示意图,target speed线为本车的目标车速,vx_evt线为前方车辆车速,instantcg线为本车实际车速。
[0077]
性能评价指标值表:
[0078] sasdcdda
‑
aeb2.170.4140.0009传统aeb2.010.3820.0009
[0079]
该结果表明车辆在高摩擦系数的路面上行驶时,da
‑
aeb系统虽然比传统aeb介入时间要晚,但安全性却略高于传统aeb系统,且制动舒适性没有受到影响。
[0080]
(2)设路面摩擦系数为0.6,如图4和5为aeb系统传感器数据,如图4为距离示意图,图5为车速示意图。
[0081]
性能评价指标值表:
[0082] sasdcdda
‑
aeb4.5810.0430.0007
传统aeb0.8750.4280.0005
[0083]
该结果表明车辆在摩擦系数不高的路面上行驶时,da
‑
aeb系统比传统aeb介入时间要早,以获得足够的安全性,制动舒适性基本没有受到影响。
[0084]
(2)设路面摩擦系数为0.4,如图6和7为aeb系统传感器数据,如图6为距离示意图,图7为车速示意图。
[0085]
性能评价指标值表:
[0086][0087]
该结果表明车辆在摩擦系数很低的路面上行驶时,da
‑
aeb系统具有极高的灵敏度,以获得足够的安全性,而传统aeb较大概率难以避免碰撞。
[0088]
尽管已描述了本发明的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明范围的所有变更和修改。
[0089]
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1