电动液压制动系统的制作方法
电动液压制动系统
1.相关技术的交叉引用
2.本技术基于并要求于2020年6月1日提交、申请号为10
‑
2020
‑
0065727的韩国专利申请的优先权,其全部内容通过引用并入本文。
技术领域
3.在至少一个实施例中,本公开涉及电动液压制动系统。
背景技术:
4.本部分的描述仅提供与本公开相关的背景信息,并不一定构成现有技术。
5.电子驻车制动系统(electronic parking brake,epb)提供在驻车期间保持车辆停止的简单功能,以及提高驾驶员便利性和驾驶稳定性的各种附加功能。这些附加功能之一是动态制动功能,用于在驾驶时制动车辆。动态制动是一种当安装在车辆上的液压制动器出现异常时允许驾驶员使用电子驻车制动系统作为紧急制动装置的功能。
6.传统的电子制动系统设有冗余制动系统,用于在主制动组件异常操作的情况下提供辅助备用制动力。但是,在备用制动期间,液压控制在前轮上而不是在后轮上执行。相关的现有技术包括10
‑
1294126号韩国专利注册“再生制动系统”。这里,在备用制动期间仅在前轮上执行液压控制背后的逻辑是通过增加再生制动的比例来增加能量回收量。然而,在备用制动期间仅制动前轮会导致制动力和车辆稳定性的恶化,这是不利的。此外,在备用制动过程中发生的车轮滑动可能导致事故发生,从而导致一些严重的损坏。
7.因此,有必要通过在备用制动期间利用电子驻车制动的动态制动功能来通过后轮的制动力和滑动控制来确保车辆的稳定性。
8.此外,即使使用动态制动功能,也需要通过用再生制动力补充不足的制动力来确保制动效率。
技术实现要素:
9.根据至少一个实施例,本公开提供一种电动液压制动系统,该电动液压制动系统包括一个或多个主制动组件、一个或多个电子驻车制动系统(electronic parking brake,epb)、一个主控制单元,以及一个冗余控制单元(redundancy control unit,rcu)。该主制动组件用于在车辆的一个或多个前轮和一个或多个后轮中产生制动力。该电子驻车制动系统(epb)用于对前轮和后轮之一产生制动力。该主控制单元用于控制每个主制动组件的运行。该冗余控制单元(redundancy control unit,rcu)用于控制该电子驻车制动系统的运行。在此,当确定该主控制单元的制动功能出现故障时,该冗余控制单元基于来自一个或多个轮速传感器的信号,通过使用电子驻车制动系统来对车辆进行滑动控制。
附图说明
10.图1为根据本公开至少一个实施例的电动液压制动系统的框图。
11.图2为根据本公开至少一个实施例的电动液压制动系统的制动方法的流程图。
12.图3为详细描述图2中步骤s220的流程图。
13.图4为详细描述图2中步骤s240的流程图。
具体实施方式
14.本公开的至少一个实施例寻求为车辆提供一种冗余控制单元,该冗余控制单元响应于高μ状态下的不导致车轮滑动的备用制动事件,通过利用前轮液压来确保0.8g(重力加速度)的制动力,并响应于更高的制动力需求,采用电子驻车制动系统的慢速上升(slow ramp up,sru)功能来提供额外的后轮制动力,从而安全制动车辆。
15.本公开的至少一个实施例还寻求为车辆提供该冗余控制单元,该冗余控制单元响应于易受车轮滑动影响的低μ状态,用于在后轮上采用电子驻车制动系统的真实车轮解锁器(real wheel unlocker,rwu)功能来提供后轮滑动控制,从而安全制动车辆。
16.本公开的至少一个实施例还寻求采用再生制动功能来增加辅助制动力以响应制动力不足,从而实现有效的车辆制动。
17.下面参考附图描述本公开的一些示例性实施例。在以下描述中,相似的附图标记优选地表示相似的元件,尽管这些元件在不同的附图中示出。进一步地,在以下一些实施例的描述中,鉴于清晰和简洁,会省略本文中已知功能和配置的详细描述。
18.此外,用于给组件编号的字母和数字编码,例如第一、第二、i)、ii)、a)、b)等,仅用于区分一个组件和另一个组件的目的,而不暗示或表示组件的主体、顺序或次序。在整个说明书中,当部件“包括”或“包含”一个组件时,意味着该部件还包括其它组件,除非有与之相反的具体描述,否则不排除其它组件。
19.图1是根据本公开至少一个实施例的电动液压制动系统的框图。
20.如图1所示,根据本公开至少一个实施例的电动液压制动系统100包括主制动组件110、电子驻车制动系统(epb)120、主控制单元130、次要或冗余控制单元(rcu)140、再生制动单元150、轮速传感器(未示出)和加速度传感器(未示出)的全部或部分。
21.每个主制动组件110都是通过使用液压将制动力传递到车轮的装置。该主制动组件110根据来自该主控制单元130的信号来通过液压制动单元(未示出)产生的液压来制动前轮和后轮。该主制动组件110根据来自该冗余控制单元140的信号来通过该液压制动单元产生的液压制动前轮。
22.该电子驻车制动系统(epb)120是根据该冗余控制单元140的信号向后轮传递制动力的装置。电子驻车制动系统120有利地设置在后轮上,专门用于后者接收所传递的制动力,省去了在前轮上安装电子驻车制动系统120的需要,从而降低了成本。后轮上电子驻车制动系统120的有限布置消除了为冗余控制单元140提供用于控制前轮电子驻车制动系统的输出终端的需要,这在确保空间方面也是有利的。然而,应当注意,本公开不限于这种构造,而是包括与之相反的构造,即,电子驻车制动系统120专门设置在前轮上的情况。
23.该主控制单元130可以是防抱死制动系统(anti
‑
lock brake system,abs)、电子稳定性控制系统(electronic stability control,esc)、传统制动系统(conventional brake system,cbs)或其他这种液压制动系统的电子控制单元。
24.该abs防止车辆制动期间车轮滑动,以防止失去驾驶员的控制,以及制动期间车轮
的抱死,从而缩短制动距离。
25.该esc系统是用于优化地控制车辆驾驶姿态的装置,该esc系统通过瞬时独立控制驱动轮以保持车辆稳定性,从而增强将要在干燥路面、下雨道路、碎石道路和下雪道路等上发生滑动的车辆的驾驶稳定性。
26.该cbs是一种机械制动系统,用于通过绕过电子控制装置将液压制动单元(未示出)中产生的液压直接传递到主制动组件110来进行制动。
27.同时,该主控制单元130可以产生再生制动信号,并将该再生制动信号传输到该再生制动单元150。
28.除了主控制单元130的功能之外,冗余控制单元140具有控制电子驻车制动系统120的功能。冗余控制单元140通过信号线连接到负责制动后轮的电子驻车制动系统120。
29.冗余控制单元140是在从主控制单元130处接收到主控制单元130发生故障的信息时附属地控制车辆制动的冗余系统。除了abs、esc系统和cbs之外,冗余控制单元140还包括后轮解锁(rear wheel unlocker,rwu)功能和慢速上升(sru)功能。
30.该后轮解锁(rwu)功能在车辆驾驶期间无法产生正常制动力的情况下利用电子驻车制动系统120来产生制动力。该rwu功能利用由前轮轮速传感器(未示出)和后轮轮速传感器(未示出)测量的各轮速间的差别来确定车轮是否发生滑动。在此,滑动是指由于驱动力超过轮胎和路面之间的附着力而导致驱动轮空转的现象。
31.冗余控制单元140通过利用前轮速度传感器的测量值作为与后轮速度传感器的测量值进行比较的基础来确定车辆中是否发生了滑动。此时,冗余控制单元140响应于后轮的轮速大于前轮的轮速,以确定驱动力超过轮胎和路面之间的附着力,因此驱动轮空转。换句话说,冗余控制单元140基于前轮的轮速来确定车辆中是否发生了滑动。
32.当滑动发生时,冗余制动控制单元140利用电子驻车制动系统120在后轮进行滑动控制。在此,该滑动控制响应于在车辆控制期间路面摩擦系数较小而导致发生车轮滑动时,用于暂时减小后轮制动力(与abs控制相似)来保证车辆稳定性,并响应于当车轮滑动消失时,恢复后轮的制动力。
33.当所有或部分轮速传感器出现故障时,即在使用轮速进行滑动控制失败的情况下,慢速上升(sru)功能将启用。该sru功能逐渐增加电子驻车制动系统120的制动力,以在没有接收到轮速传感器的信息时制动后轮。该sru功能需要来自加速度传感器(未示出)的信息来确定车辆是否随着电子驻车制动系统120的制动力的增加而减速。利用加速度传感器的信息,确定车辆是否被电子驻车制动系统120制动并减速。
34.当加速度传感器的测量值显示车辆未减速时,该冗余控制单元140增加电子驻车制动系统120的制动力。另一方面,当车辆减速时,电子驻车制动系统120的制动力根据制动情况适当调整。由于该sru功能利用了加速度传感器,无论轮速传感器是否发生故障,该sru都可以运行。
35.同时,冗余控制单元140可以像主控制单元130一样工作,以生成再生制动信号,并将该再生制动信号传递至再生制动单元150。
36.再生制动单元150可以包括电池(未示出)和混合控制单元(hybrid control unit,hcu)(未示出)的全部或部分,该电池用于存储再生制动期间从电动机(未示出)产生的反电动势所产生的能量,该电动机利用车辆的惯性力来执行再生制动以在车辆制动期间
保持直线运动,该混合控制单元通过计算可通过再生制动提供给车辆的再生制动力来控制执行再生制动。
37.再生制动是指使用车辆的驱动惯性驱动电动机作为发电机,并利用驱动电动机产生的阻力作为制动力。此外,当车辆行驶时,再生制动单元150可以向电动机供应电力。再生制动单元150响应于由主控制单元130和冗余控制单元140产生的再生制动信号来驱动电动机,从而产生再生制动力。因此,在制动期间,再生制动单元150和液压制动单元(未示出)协作执行制动,这向车辆提供稳定的制动力。
38.轮速传感器(未示出)设置在多个车轮上。该轮速传感器测量轮速。该轮速传感器可以分别设置在前轮和后轮上。该轮速传感器分别测量前轮fr、fl和后轮rr、rl的轮速。将所测量的轮速传输至主控制单元130和冗余控制单元140。
39.加速度传感器(未示出)是测量车辆是否由电子驻车制动系统120制动而减速的装置。将所测量的车辆加速度传输至主控制单元130和冗余控制单元140。
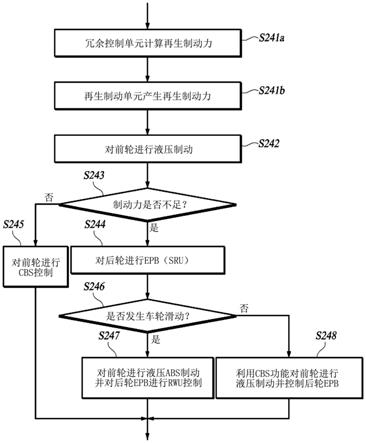
40.图2是根据本公开至少一个实施例的电动液压制动系统的制动方法的流程图。
41.响应于驾驶员的制动请求,使用主控制单元130的传感器确定正常制动功能是否发生异常(s210)。
42.当确定主控制单元130正常时,车辆由主控制单元130制动(s220)。主控制单元130利用再生制动单元150的再生制动力和液压制动单元的液压制动力将制动力传递至前轮和后轮。
43.当确定主制动单元130发生异常时,利用冗余控制单元140的传感器确定冗余控制单元140的正常制动功能是否发生异常(s230)。
44.当确定冗余控制单元140正常时,由冗余控制单元140制动车辆(s240)。冗余控制单元140使用再生制动单元150产生的再生制动力和液压制动单元产生的液压将制动力传递至前轮和后轮,并额外将电子驻车制动系统120的制动力传递至后轮。
45.当主控制单元130和冗余控制单元140均确定异常,利用主控制单元130的传感器确定主控制单元130的电源功能是否故障(s250)。
46.当确定主控制单元130的电源正常时,车辆由主控制单元130降级控制(s260)。在此,降级控制指由于主控制单元130的故障而仅利用部分制动功能而不利用全部制动功能的控制方法。由于在降级控制期间仅利用了部分制动功能,制动性能比主控制单元130正常时低。
47.另一方面,当确定主控制单元130的电源故障时,警示灯开启以告知驾驶员主控制单元130和冗余控制单元140无法进行正常的制动功能(s270)。在该情况下,车辆由驾驶员踩压制动踏板来制动。
48.图3为详细描述图2中步骤s220的流程图。
49.当确定主控制单元130正常时,主控制单元130计算制动车辆所需的再生制动力(s221a)。在此,再生制动力指再生制动单元150产生的制动转矩。同时,液压制动力指液压制动单元产生的制动转矩。
50.主控制单元130将再生制动信号传输至再生制动单元150,相应地,再生制动单元150产生对应于再生制动信号的再生制动力(s221b)。
51.主控制单元130通过适当利用再生制动单元150的再生制动力和液压制动单元的
液压制动力来制动车辆的前轮和后轮(s222)。
52.主控制单元130确定车轮是否发生滑动(s223)。车轮是否发生滑动通过计算前轮和后轮转速间的差值来确定,该转速由车轮的轮速传感器分别测量。当发生滑动时,驱动轮空转,导致前轮和后轮的转速不同。相应地,主控制单元130可以确定车轮是否因为前轮和后轮的轮速传感器所测量的轮速间具有差值而滑动。
53.当确定车轮发生滑动时,主控制单元130使用abs功能来防止车轮在制动期间抱死,从而防止车辆滑动,并控制不失去驾驶员的操纵(s224)。
54.在确定车轮中没有发生滑动时,主控制单元130通过利用cbs功能制动前轮和后轮,来将液压制动系统中产生的液压传递至主制动组件110(s225)。
55.最终,主控制单元130根据驾驶员的制动请求通过abs或cbs控制来制动前轮和后轮。
56.图4为详细描述图2中步骤s240的流程图。
57.当确定步骤s230中的冗余控制单元140正常时,冗余控制单元140计算制动车辆所需的再生制动力(s241a)。
58.冗余控制单元140将再生制动信号传输至再生制动单元150,且相应地,再生制动单元150产生对应于再生制动信号的再生制动力(s241b)。
59.冗余控制单元140通过适当利用再生制动单元150的再生制动力和液压制动单元的液压制动力来制动车辆的前轮(s242)。
60.此时,冗余控制单元140使用前轮上的液压控制来确保0.8g的制动力(g是重力加速度),并确定是否需要额外的制动力(s243)。在这种情况下,冗余控制单元140根据加速度传感器测量的加速度确定车辆是否正在减速,并确定是否需要更多制动力。
61.在确定需要更多制动力时,冗余控制单元140控制电子驻车制动系统120以增加后轮的制动力。在此,冗余控制单元140使用慢速上升(sru)功能控制电子驻车制动系统120(s244)。
62.当确定不需要更多制动力时,冗余控制单元140通过液压制动系统将根据传统制动系统(cbs)产生的液压传递至主制动组件110,从而制动前轮和后轮(s245)。
63.在步骤s244之后,冗余控制单元140计算由车轮的轮速传感器测量的前轮转速和后轮转速之间的差值,以确定车轮中是否发生滑动(s246)。当发生滑动时,驱动轮空转,导致前轮和后轮的转速不同。相应地,冗余控制单元140可以确定车轮是否因为前轮速度传感器和后轮速度传感器所测量的轮速间的差值而滑动。
64.当确定车轮发生滑动时,冗余控制单元140利用abs功能防止前轮在制动期间抱死,从而防止车辆滑动以及进行制动时不失去驾驶员的操纵。同时,后轮通过使用后轮解锁(rwu)功能滑动控制电子驻车制动系统(s247)。
65.当确定步骤s246中车轮未发生滑动,冗余控制单元140利用cbs功能来将液压制动系统产生的液压传递至主制动组件110,从而制动前轮并控制电子驻车制动系统120,并且从而控制后轮(s248)。
66.如上所述,本公开在一些实施例中提供了具有冗余控制单元的车辆,该冗余控制单元响应于主控制单元的故障,来采用慢速上升(sru)功能来确保后轮制动力,以及车辆的稳定性。
67.此外,本公开在至少一个实施例中采用后轮解锁(rwu)功能响应于后轮制动期间发生的车轮滑动,从而确保车辆的稳定性。
68.进一步地,本公开在至少一个实施例中采用再生制动功能来增加辅助制动力,以响应于即使使用了动态制动功能制动力仍不足的情况,从而实现有效的车辆制动。
69.尽管出于说明的目的已经描述了本公开的示例性实施例,但是本领域技术人员将理解,在不脱离所要求保护的发明的思想和范围的情况下,各种修改、添加和替换是可能的。因此,本公开的示例性实施例是出于简洁和清楚的目的来描述的。本实施例的技术思路的保护范围不由描述来限制。相应地,普通技术人员将理解,所要求发明的保护范围不由上述详细描述的实施例来限定,而由权利要求及其等同的内容来限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1