车辆制动装置及方法与流程
1.本公开公开的实施例涉及车辆制动装置及方法。
背景技术:
2.该部分记载的内容仅用于提供本公开公开的背景信息,并不构成现有技术。
3.备用制动系统(redundancy brake system)是主制动系统(main brake system)发生故障时用于辅助制动车辆的备用(backup)系统。现有的制动装置具有当主制动系统的制动发生异常时辅助地提供制动力的备用制动系统。现有的备用制动系统在主制动系统正常工作时将不执行任何功能且处于待机状态。即,当主系统中不发生故障时,存在备用系统不执行任何功能的问题。
4.主动侧向稳定器(ars:active roll stabilizer)系统是用于控制车辆行驶过程中当左右转弯或者在不平坦的路面行驶时,为防止因离心力产生的倾斜现象的侧倾力矩(roll moment)的系统。ars系统通过测量连接在车轮制动器的稳定感(stabilizer bar)的转矩torque)来控制侧倾力矩,从而在车辆驾驶时可提高驾驶员的乘车感,可提高车辆的行驶稳定性。ars系统由致动器、阀门单元、液压泵组成。现有一般的液压式稳定器单独于制动系统另行准备驱动源,例如,液压泵等,从而不利于确保车辆空间。
技术实现要素:
5.技术问题
6.由此,本公开公开的主要目的在于,通过在主系统处于正常情况下使备用系统一起形成制动力,从而提高制动稳定性(braking stability)和制动响应速度(braking response speed)。
7.此外,本公开公开的另一主要目的在于,液压式稳定器无需另备驱动源而是使用产成制动力的驱动单元的液压,从而有利于确保车辆空间。
8.技术方案
9.根据本公开的一实施例,提供一种车辆制动装置,包括:多个车轮制动器,其对应多个车轮分别设置,且对所述多个车轮分别产生制动力;第一驱动单元,其以利用第一发动机和第一主缸向所述多个车轮制动器提供制动力的方式构成;第二驱动单元,其以利用第二发动机和第二主缸向所述多个车轮制动器提供制动力的方式构成;第一电控单元,其用于控制所述第一驱动单元且用于判断所述第一驱动单元和所述第二驱动单元是否发生故障;以及第二电控单元,其用于控制所述第二驱动单元且用于判断所述第一驱动单元和所述第二驱动单元是否发生故障,所述第一电控单元和所述第二电控单元判断相互间是否发生故障,当所述第一电控单元和所述第二电控单元均判断为正常时,所述第一电控单元控制所述多个车轮制动器中至少一部分车轮制动器的制动,所述第二电控单元控制所述多个车轮制动器中剩余部分车轮制动器的制动。
10.技术效果
11.如上所述,根据本实施例,即使主系统处于正常的情况下也能够与备用系统一起形成制动力,主系统需要提供液压的车轮制动器的数量由4个减少至2个,从而具有提高制动稳定性(braking stability)和制动响应速度的效果。
12.此外,根据本实施例,液压式稳定器无需另备驱动源而是使用产成制动力的驱动单元作为驱动源,从而具有可确保原额外的驱动源曾占有的空间的余份的效果。
附图说明
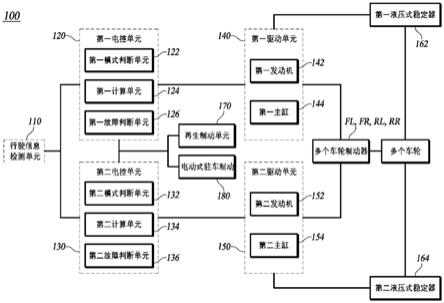
13.图1是根据本公开一实施例的制动装置的方框图;
14.图2是用于简单地说明根据本公开实施例的第一电控单元或者第二电控单元的制动过程的流程图;
15.图3是用于详细说明图2的过程s220的流程图;
16.图4是用于详细说明图2的过程s230的流程图;
17.图5是用于详细说明图2的过程s24的流程图;
18.图6是显示根据本公开一实施例的踏板分离型制动装置的示图;
19.图7是显示根据本公开另一实施例的踏板一体型制动装置的示图。
20.附图标记说明
21.110:行驶信息检测单元
ꢀꢀꢀꢀꢀ
120:第一电控单元
22.130:第二电控单元
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
140:第一驱动单元
23.150:第二驱动单元
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
162和164:液压式稳定器
24.170:再生制动单元
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
180:电动式驻车制动
25.710:备用主缸
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
fl、fr、rl及rr:多个车轮制动器
具体实施方式
26.下面,参照附图对本公开的实施例进行详细说明如下。标注附图标记时,即使相同组成要素在不同的附图中出现,也尽可能使用了相同的附图标记。同时还要注意,在通篇说明书中,如果认为对相关已知的组成要素和功能的具体说明可能会导致本公开主旨不清楚,则省略其详细说明。
27.在说明本公开涉及的实施例的组成要素的过程中,可以使用第一、第二、i)、ii),a)、b)等用语。这些术语仅仅是为了区分相应组成要素与其他组成要素,并非限定其本质、次序或顺序等。贯穿说明书全文,如果一组成要素“包括”、“具备”另一组成要素,如果没有特殊地相反的记载,可理解为一组成要素还包括另一组成要素,而非理解为一组成要素排斥另一组成要素。
28.参照图1,根据本公开实施例的车辆制动装置包括多个车轮制动器fl、fr、rl及rr、行驶信息检测单元110(driving information detecting unit),第一电控单元120(first ecu,ecu:electronic control unit),第二电控单元130(second ecu)\第一驱动单元140(first actuator)、第二驱动单元150(second actuator)、第一液压式稳定器162(first hydraulic ars,ars:active roll stabilizer)、第二液压式稳定器164(second hydraulic ars)、再生制动单元170(regenerative braking unit)及电动式驻车制动器180(epb:electronic parking brake)的全部或者一部分。
29.多个车轮制动器fl、fr、rl及rr包括用于制动汽车的前方左侧轮的第一轮制动器fl、用于制动所述汽车的前方右侧轮的第二轮制动器fr、用于制动所述汽车的后方左侧轮的第三轮制动器rl及用于制动所述汽车的后方右侧轮的第四轮制动器rr。
30.多个车轮制动器fl、fr、rl及rr与车辆的各车轮(wheel)对应设置。多个车轮制动器fl、fr、rl及rr各自独立地控制,并对各车轮产生制动力(braking force)。
31.行驶信息检测单元110包括轮速传感器(wheel speed sensor)、加速度传感器(acceleration sensor)、侧向加速度传感器(lateral acceleration sensor)、踏入量传感器(pedal stroke sensor)的全部或者一部分。
32.轮速传感器感测车轮制动器的轮速(wheel speed),加速度传感器感测车辆的加速度(acceleration),侧向加速度传感器感测车辆的侧向加速度(lateral acceleration),踏入量传感器感测制动踏板的踏入量(stroke)。行驶信息检测单元110将各传感器感测到的信息传递给所述第一电控单元120和所述第二电控单元130。
33.第一电控单元120包括第一模式判断单元122、第一计算单元24、第一故障判断单元126的全部或者一部分。
34.第一电控单元120控制第一驱动单元140的液压生成。
35.第一模式判断单元122利用行驶信息判断模式(mode)。其中,行驶信息是指前面所述的传感器感测到的信息,例如,制动踏板踏入量、轮速、侧向加速度、加速度等。另外,模式是指转弯模式(cornering mode),制动模式(braking mode)、转弯及制动模式(cornering and braking mode)。转弯模式是指用于控制车辆行驶过程中左右转弯或者在不平坦的路面行驶时,为防止因离心力产生倾斜现象的侧倾力矩(roll moment)的模式。制动模式是指,在车辆行驶过程中利用制动装置形成制动力的模式。制动和转弯模式是指,在车辆行驶过程中控制侧倾力矩的同时形成制动力的模式。
36.第一模式判断单元122利用行驶信息判断模式。更具体地,当感测到制动踏板的踏入量时,第一模式判断单元122判定控制模式为制动模式。另外,当感测到车辆的侧向加速度时,第一模式判断单元122判定控制模式为转弯模式。而且,当感测到踏入量和侧向加速度时判定控制模式为制动和转弯模式。
37.当第一模式判断单元122判定控制模式为制动模式时,第一计算单元24计算制动所需的制动力,当第一模式判断单元122判定控制模式为转弯模式时,第一计算单元24计算用于控制侧倾力矩的转矩,当第一模式判断单元122判定控制模式为转弯和制动模式时,第一计算单元24计算制动力和转矩。
38.第一故障判断单元126判断第一驱动单元140和第二驱动单元150是否发生故障。根据第一故障判断单元126的判断结果,决定第一驱动单元140和第二驱动单元150应制动的车轮制动器fl、fr、rl及rr的数量。
39.例如,当第一故障判断单元126判定第一驱动单元140为正常,且判定第二驱动单元150为发生故障时,第一电控单元120控制第一驱动单元140向所有车轮制动器fl、fr、rl及rr提供液压以形成制动力。相反地,第一故障判断单元126判定第一驱动单元140和第二驱动单元150均为正常时,第一电控单元120控制第一驱动单元140向部分车轮制动器提供液压以形成制动力。其中,部分车轮制动器例如可指两个车轮制动器,更具体地可指fl和fr。
control unit,未图示),其计算能够利用再生制动提供给车辆的再生制动力并控制车辆执行再生制动(regenerative braking)。再生制动(regenerative braking)通过发动机产生逆转矩来弱化车辆的促进力,从而减小车辆的行驶速度。
56.再生制动单元170在车辆行驶时可向电动机提供电力。再生制动单元170基于所述第一电控单元120和所述第二电控单元130产生的再生制动信号,驱动电动机并产生再生制动力。因此,制动时再生制动单元170和液压制动单元互动并进行制动,从而可向车辆提供强烈且稳定的制动力。
57.电动式驻车制动器180除了提供驻车时用于维持车辆停止状态的基本功能以外,还提供用于提高方便性及驾驶稳定性的各种附加功能。这些附加功能其中之一是行驶中用于制动车辆的动态制动(dynamic braking)功能。动态制动是当车辆上安装的液压制动发生异常时电控单元120或者130将电动式驻车制动器180作为备用制动装置使用的功能。
58.电动式驻车制动器180基于第一电控单元或者第二电控单元的信号对车轮形成制动力。根据本公开的一实施例,电动式驻车制动器180只设置于后轮上。电动式驻车制动器180只设置于后轮上的目的在于,前轮上不设置电动式驻车制动器180可节约成本,控制装置中无需设置用于控制前轮电动式驻车制动器180的输出端子(未图示),可有利于确保空间。但是,需要注意的是,本实施例并不限于此,还包括与其相反的情况即电动式驻车制动器180只设置于前轮的情况。
59.当判定第一驱动单元140和第二驱动单元150均发生故障时,第一电控单元120或者第二电控单元130控制再生制动单元170和电动式驻车制动器180对车辆进行制动。例如,第一电控单元120控制再生制动单元170对前轮进行再生制动,控制电动式驻车制动器180对后轮进行制动。第二电控单元130也如同第一电控单元120,通过控制可使再生制动单元170和电动式驻车制动器180对车辆进行制动。即,第二电控单元130可执行第一电控单元120所执行的所有功能。
60.在本公开中,存在两个电控单元120和130的目的在于,其中一个电控单元(例如,120)中发生故障,另一正常的电控单元(例如,130)将代替发生故障的电控单元(例如,120)的功能,从而能够安全地对车辆进行制动。
61.更具体地,当判定第一驱动单元140和第二驱动单元150均发生故障时,第一电控单元120控制再生制动单元170和电动式驻车制动器180对车辆进行制动。但是,其中,当第一电控单元120也一起发生故障时,第二电控单元130控制再生制动单元170和电动式驻车制动器180对车辆进行制动。
62.第一液压式稳定器162包括致动器(未图示)、多个控制阀门(未图示)。
63.液压式稳定器为本技术领域众所周知的内容,因此省略具体说明。只是,本公开的详细说明中将主要针对与一般的稳定器的区别进行说明。
64.一般的液压式稳定器上另行配备有液压泵,利用液压泵的驱动力维持车辆的平衡。但是本公开的液压式稳定器ars无需另行配备液压泵,利用第一驱动单元140中包括的第一主缸144的液压,维持车辆的平衡。因此,无需另行配备液压泵,可节约成本,进而有利于确保车辆空间。
65.第一液压式稳定器162基于第一电控单元120的指令得到控制。
66.第二液压式稳定器164与第一液压式稳定器的区别在于,受控于第二电控单元130
的指令,除此之外的其它结构全部相同,因此将省略详细说明。
67.图2是用于简单地说明根据本公开实施例的第一电控单元120或者第二电控单元130的制动过程的流程图。
68.参照图2,本公开的第一电控单元120利用行驶信息检测单元110检测出的行驶信息判断控制模式s210。
69.其中,第一电控单元120利用行驶信息判断控制模式的过程将参照图1中说明的内容。
70.当第一电控单元120判定控制模式为制动模式时,第一电控单元120根据s220过程控制第一驱动单元140和第二驱动单元150。s220过程将在图3中详细说明。
71.当第一电控单元120判定控制模式为转弯模式时,第一电控单元120利用s230过程控制第一驱动单元140和第二驱动单元150。s230过程将在图4中详细说明。
72.当第一电控单元120判定控制模式为制动和转弯模式时,第一电控单元120根据s240过程控制第一驱动单元140和第二驱动单元150。s240过程将在图5中详细说明。
73.如果第一电控单元120根据s220、s230以及s240过程完成控制过程,则将结束运算法则。
74.图3是用于详细说明图2的过程s220的流程图。
75.参照图3,电控单元判断第一驱动单元140和第二驱动单元150是否为正常s310。其中,电控单元例如为第一电控单元120或者第二电控单元130。
76.在s310过程中当判定第一驱动单元140和第二驱动单元150均为正常时,第一电控单元120控制第一驱动单元140向至少一部分的车轮制动器提供液压以形成制动力,第二电控单元130控制第二驱动单元150向剩余一部分的车轮制动器提供液压以形成制动力s320。其中,至少一部分的车轮制动器可以指例如fl和rr,剩余的一部分可以指fr和rl。
77.相反地,在s310过程中当判定第一驱动单元140和第二驱动单元150中存在异常的驱动单元时,第一电控单元120判断第一驱动单元140是否为正常s330。
78.在s330过程中,当判定第一驱动单元140为正常时,意味着第二驱动单元150中发生故障。这种情况下,第一电控单元120控制正常的第一驱动单元140向所有的车轮制动器fl、fr、rl及rr提供液压以形成制动力s340。
79.相反地,在s330过程中,当判定第一驱动单元140为异常时,即,判定第一驱动单元140为故障时第二电控单元120判断第二驱动单元150是否为正常s350。
80.在s350过程中,当判定第二驱动单元150为正常时,意味着第一驱动单元140中发生故障。这种情况下,第二电控单元130控制第二驱动单元150向所有的车轮制动器fl、fr、rl及rr提供液压以形成制动力s360。
81.相反地,在s350过程中,当判定第二驱动单元150为异常时即,判定第一驱动单元140和第二驱动单元150均为故障时,电控单元不能进行液压控制。因此这种情况下电控单元控制再生制动单元170进行再生制动,控制电动式驻车制动器180形成制动力。例如,前轮进行再生制动,后轮可由电动式驻车制动器180进行制动s370。
82.图3的流程图是本公开一实施例其中之一,本公开的电控单元为了判断第一驱动单元和第二驱动单元是否发生故障,还可以包括其它流程图,例如包括首先判断第二驱动单元是否发生故障的情况。
83.图4是用于详细说明图2的过程s230的流程图。
84.参照图4,电控单元判断第一驱动单元140和第二驱动单元150是否为正常s410。其中,电控单元例如为第一电控单元120或者第二电控单元130。在s410过程中,当判定第一驱动单元140和第二驱动单元150均为正常时,第一电控单元120控制第一驱动单元140向第一液压式稳定器162提供液压以维持车辆的平衡,第二电控单元130控制第二驱动单元150向第二液压式稳定器164提供液压以维持车辆的平衡s420。例如,第一液压式稳定器162维持前轮的平衡,第二液压式稳定器164维持后轮的平衡。
85.相反地,在s410过程中,当判定第一驱动单元140和第二驱动单元150中存在异常的驱动单元时,电控单元判断第一驱动单元140是否为正常s430。
86.在s430过程中,当判定第一驱动单元140为正常时,意味着第二驱动单元150中发生故障。此时,第一电控单元120控制正常的第一驱动单元140向第一液压式稳定器162提供液压以维持车辆的平衡s440。其中,第一液压式稳定器162维持车辆的平衡是指使前轮或者后轮中任意一个保持平衡。
87.在s430过程中,当判定第一驱动单元140为异常时,判定第一驱动单元140发生故障时,电控单元执行判断第二驱动单元150是否为正常的过程s450。
88.在s450过程中,当判定第二驱动单元150为正常时,意味着第一驱动单元140中发生故障。此时,第二电控单元130控制正常的第二驱动单元150向第二液压式稳定器164提供液压以维持车辆的平衡s460。其中,第二液压式稳定器164维持车辆的平衡是指使前轮或者后轮中任意一个保持平衡。
89.相反地,在s450过程中,当判定第二驱动单元150为异常时,即判定第一驱动单元140和第二驱动单元150均发生故障时,电控单元不控制第一液压式稳定器162和第二液压式稳定器164s470。
90.图5是用于详细说明图2的过程s240的流程图。
91.参照图5,电控单元判断是否需要紧急制动s510。电控单元利用行驶信息判断是否需要紧急制动。其中,电控单元例如是第一电控单元120或者第二电控单元130。例如,当踏入量激增时,加速度传感器激增时,电控单元判定需要紧急制动。
92.如果电控单元判定车辆需要紧急制动,则电控单元控制第一驱动单元140和第二驱动单元150向车轮制动器提供液压以形成制动力。如果形成充分的制动力则电控单元控制第一驱动单元140和第二驱动单元150向第一液压式稳定器162和第二液压式稳定器164提供液压以维持车辆的平衡s520。
93.相反地,如果电控单元判定车辆不需要紧急制动则电控单元判断车辆是否需要紧急转弯s530。电控单元利用行驶信息判断是否需要紧急转弯。例如,当倾力矩激增时,电控单元判定需要紧急转弯。
94.如果电控单元判定车辆需要紧急转弯则电控单元控制第一驱动单元140和第二驱动单元150向第一液压式稳定器162和第二液压式稳定器164提供液压以维持车辆的平衡,控制再生制动单元170形成再生制动力。如果维持车体的平衡,则电控单元控制第一驱动单元140和第二驱动单元150向车轮制动器fl、fr、rl及rr提供液压s540。
95.如果电控单元判定车辆不需要紧急转弯,则电控单元控制再生制动单元170形成再生制动力,并控制第一驱动单元140和第二驱动单元150向第一液压式稳定器162和第二
液压式稳定器164提供液压以维持车体的平衡s550。
96.图6是显示本公开一实施例中踏板分离型制动装置的示图。
97.参照图6,图6是包括图1中说明的本公开的组成要素的全部或者一部分的一实施例。
98.图7是显示本公开一实施例中踏板一体型制动装置的示图。
99.参照图7,本公开的一实施例在图6中涉及的一实施例的基础上增加了备用主缸710和多个阀门720、730、740及750。
100.当第一驱动单元140或者第二驱动单元150为正常时,第一阀门720开放,踏板模拟器(pedal simulator)提供反作用力感以使驾驶员能够感受到如一般的液压式制动装置中的踏板压力。即,当第一驱动单元140或者第二驱动单元150为正常时,备用主缸710起到向驾驶员提供反作用力感的踏板模拟器的功能。
101.相反地,当第一驱动单元140和第二驱动单元150均发生故障时,第二阀门730和第三阀门740开放,第四阀门750关闭。由此,备用主缸710通过向多个车轮制动器fl、fr、rl及rr提供液压来形成制动力。即,当第一驱动单元140和第二驱动单元150均发生故障时,备用主缸710与再生制动单元170及电动式驻车制动180一起起到对车辆进行制动的功能。
102.以上说明仅仅是为了举例说明本实施例的技术思想,只要是本实施例所属的技术领域的技术人员,在不超过本实施例的本质特征的范围内,可进行各种修改和变形。因此,本实施例不是为了限定本实施例的技术思想,而是为了对其进行说明,本实施例的技术思想的范围不限于上述实施例。本实施例的保护范围应依据权利要求书进行解释,与其等同范围内的所有技术思想均被认为属于本实施例的权利范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1