驾驶辅助装置的制作方法
1.本发明涉及一种驾驶辅助装置。所述驾驶辅助装置例如用于减速辅助的技术领域。
背景技术:
2.作为这种装置,例如,提出了以下装置:在满足了规定的条件的情况下执行减速辅助控制,在不满足所述规定的条件的情况下解除减速辅助控制(参照日本特开2020-111218)。
3.在日本特开2020-111218中,作为上述规定的条件之一,列举了加速踏板被释放(即,加速踏板未被踩下)。因此,若在减速辅助控制正在执行时驾驶员踩下加速踏板(即,若存在所谓的超控),则变得不满足上述规定的条件,减速辅助控制会被解除。此时,根据减速辅助控制的解除的方式,驾驶员有时会感觉到减速度的急剧变化(所谓的g力释放(drop in g-force))。就是说,根据减速辅助控制的解除的方式,驾驶员可能会感到违和感。
技术实现要素:
4.本发明提供一种在减速辅助控制因驾驶员的加速踏板的操作而被解除时能抑制驾驶员感到违和感的驾驶辅助装置。
5.本发明的第一方案是一种驾驶辅助装置。所述驾驶辅助装置被配置为在本车辆的驾驶员未踩踏加速踏板时执行使所述本车辆自动地减速的减速辅助控制。所述驾驶辅助装置包括:检测部,被配置为检测所述加速踏板的操作;以及控制部,被配置为:在所述减速辅助控制正在执行时检测到所述加速踏板的操作的情况下,解除所述减速辅助控制的执行。所述控制部被配置为:在解除所述减速辅助控制的执行时,根据所述加速踏板的操作的程度来使与所述减速辅助控制相关的减速控制量减少。
6.在所述第一方案中,也可以是,所述控制部被配置为:在解除所述减速辅助控制的执行时,在所述加速踏板的操作的程度比规定程度强的情况下,与所述操作的程度比所述规定程度弱的情况相比,使与所述减速辅助控制相关的减速控制量更快地减少。
7.在所述第一方案中,也可以是,所述控制部被配置为:在解除所述减速辅助控制的执行时,在所述加速踏板的操作的程度强的情况下,与所述操作的程度弱的情况相比,使与所述减速辅助控制相关的减速控制量更快地减少。
8.在所述第一方案中,也可以是,所述控制部被配置为:在解除所述减速辅助控制的执行时,所述加速踏板的操作的程度越强,使与所述减速辅助控制相关的减速控制量越快地减少。
9.在所述第一方案中,也可以是,所述操作的程度被表示为基于所述加速踏板的行程、所述行程的每单位时间的变化、所述加速踏板的踩踏力以及所述踩踏力的每单位时间的变化中的至少一个的指标。
10.在所述第一方案中,也可以是,所述控制部被配置为:在解除所述减速辅助控制的
执行时,基于所述减速控制量和根据所述加速踏板的操作推定的驾驶员的请求加速度来决定与所述本车辆相关的目标加速度。也可以是,所述控制部被配置为:在所述目标加速度比所述请求加速度小的情况下,以所述目标加速度的时间变化与所述减速控制量的时间变化对应的方式决定所述目标加速度。也可以是,所述控制部被配置为:在所述目标加速度达到了所述请求加速度的情况下,以所述目标加速度的时间变化与所述请求加速度的时间变化对应的方式决定所述目标加速度。
11.在所述第一方案中,也可以是,所述控制部被配置为:在解除所述减速辅助控制的执行时,根据所述减速辅助控制的执行的解除开始之后的所述加速踏板的操作来变更所述减速控制量的减少方式。
12.在所述第一方案中,也可以是,所述减速辅助控制在所述驾驶员未踩踏所述加速踏板并且所述本车辆的减速度为规定值以下时被执行。
13.在所述第一方案中,也可以是,所述减速辅助控制在所述驾驶员未踩踏所述加速踏板并且需要所述本车辆的减速或停止的减速对象与所述本车辆之间的距离为规定距离以上时被执行。
14.根据本发明的所述第一方案,在减速辅助控制因驾驶员的加速踏板的操作而被解除时,能抑制驾驶员感到违和感。
附图说明
15.以下,参照附图,对本发明的示例性实施例的特征、优点以及技术和工业意义进行说明,其中,相同的附图标记表示相同的元件,其中:
16.图1a是用于对减速辅助控制的概念进行说明的图。
17.图1b是用于对减速辅助控制的概念进行说明的图。
18.图2是表示与减速辅助控制相关的减速度的变化的一个例子的图。
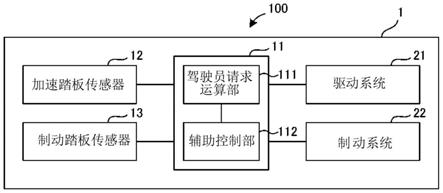
19.图3是表示实施方式的驾驶辅助装置的构成的框图。
20.图4是表示实施方式的驾驶辅助装置的动作的流程图。
21.图5a是用于对加速操作的程度的判定方法的一个例子进行说明的图。
22.图5b是用于对加速操作的程度的判定方法的一个例子进行说明的图。
23.图6a是表示实施方式的驾驶辅助装置解除减速辅助控制时的减速度的变化的一个例子的图。
24.图6b是表示实施方式的驾驶辅助装置解除减速辅助控制时的减速度的变化的一个例子的图。
25.图7是表示变形例的驾驶辅助装置解除减速辅助控制时的减速度的变化的一个例子的图。
具体实施方式
26.参照图1a至图6b,对驾驶辅助装置的实施方式进行说明。首先,对实施方式的驾驶辅助装置100(参照图3)所进行的减速辅助控制的概要进行说明,之后,进行驾驶辅助装置100的具体说明。
27.(减速辅助控制)
28.减速辅助控制可以在本车辆(例如图1a和图1b的车辆1)的行进方向前方存在减速对象并且本车辆的驾驶员既未踩下加速踏板也未踩下制动踏板时被执行。当执行减速辅助控制时,本车辆成为相对缓慢地减速的缓慢减速行驶。
[0029]“减速对象”是需要本车辆的减速或停止的对象。作为减速对象的具体例,可列举出行人、停车车辆等障碍物、临时停止标志和红灯等限制行驶的标志、交叉路口和弯路等道路构造。需要说明的是,减速对象的识别例如可以基于通过车载摄像机、雷达等外部识别单元获取到的信息、地图信息、通过路车间通信等与车辆外部的通信获取的信息等来进行。就是说,在减速对象的识别中可以应用已有的技术,因此省略对其详情的说明。
[0030]
参照图1a和图1b,对减速辅助控制进行具体说明。在图1a所示的情况下,在车辆1的行进方向前方存在灯色为“红色”的信号灯51。就是说,信号灯51相当于作为减速对象的一个例子的红灯。在车辆1的驾驶员既未踩下加速踏板也未踩下制动踏板并且车辆1与停止目标位置(在该情况下为停止线52附近)之间的距离d1为规定距离以上的情况下,驾驶辅助装置100执行减速辅助控制。
[0031]
在图1b所示的情况下,在车辆1的行进方向前方存在灯色为“红色”的信号灯51,并且存在因信号灯51的灯色为“红色”而停止的车辆53。就是说,信号灯51和车辆53相当于减速对象的一个例子。在车辆1的驾驶员既未踩下加速踏板也未踩下制动踏板并且车辆1与停止目标位置(在该情况下为与车辆53的后端相距相当于规定车间距离的距离的位置)之间的距离d2为规定距离以上的情况下,驾驶辅助装置100执行减速辅助控制。
[0032]“规定距离”是决定是否执行减速辅助控制的值,典型而言,是与车辆1的速度相应的可变值,但也可以是固定值。规定距离设定为根据车辆1的速度和与减速辅助控制相关的减速度的最大值求出的、到车辆1停止为止所需的距离或者对所述距离加上余量而得到的距离即可。需要说明的是,在距离d1小于规定距离的情况下,不执行减速辅助控制,但可以存在由例如碰撞损害减轻制动等其他功能实现的驾驶辅助。
[0033]
在执行减速辅助控制的情况下,例如如图2所示(在图2中,设为在时刻t1开始减速辅助控制),驾驶辅助装置100可以逐渐增大减速度(即,负加速度),在减速度达到了减速度dt之后,维持减速度dt。减速度dt可以基于从车辆1起至目标停止位置为止的距离(相当于图1a和图1b的距离d1和距离d2)和车辆1的速度来设定,使得车辆1在目标停止位置停止。需要说明的是,减速度dt可以是与减速辅助控制相关的减速度的最大值。
[0034]
即使在车辆1的行进方向前方存在减速对象并且车辆1的驾驶员既未踩下加速踏板也未踩下制动踏板的情况下,例如在因车辆1在上坡路等行驶而在车辆1产生比规定值大的减速度的情况下,驾驶辅助装置100也可以不执行减速辅助控制。换言之,在存在减速对象,驾驶员既未踩下加速踏板也未踩下制动踏板,并且车辆1的减速度为规定值以下的情况下,驾驶辅助装置100可以执行减速辅助控制。在此,“规定值”可以是与减速辅助控制相关的减速度的最大值。
[0035]
在实践中,在驾驶辅助装置100识别出减速对象的状态下,车辆1的驾驶员停止了加速踏板的踩下(进行了所谓的加速器关闭)的情况下,大多执行减速辅助控制。因此,可以期待驾驶员认识到只要松开加速踏板就会自动地施加制动(即,车辆1减速)。就是说,根据能执行减速辅助控制的驾驶辅助装置100,能抑制驾驶员踩错加速踏板和制动踏板。
[0036]
(驾驶辅助装置的构成)
[0037]
接着,参照图3对驾驶辅助装置100的构成进行说明。在图3中,驾驶辅助装置100搭载于车辆1。驾驶辅助装置100被配置为具备ecu(electronic control unit:电子控制单元)11、加速踏板传感器12以及制动踏板传感器13。需要说明的是,在图3中,省略上述的车载摄像机等用于识别减速对象的构成的图示。
[0038]
在车辆1中,除了搭载有驾驶辅助装置100之外,还搭载有例如驱动系统21、制动系统22等。在驱动系统21和制动系统22中可以应用已有的各种方案,因此省略对其详情的说明。需要说明的是,加速踏板传感器12和制动踏板传感器13可以不由驾驶辅助装置100独自地具备,可以与其他装置或系统共享。
[0039]
ecu11具有作为在ecu11的内部逻辑上实现的处理块(processing block)或作为在ecu11的内部物理上实现的处理电路的、驾驶员请求运算部111和辅助控制部112。
[0040]
驾驶员请求运算部111基于加速踏板传感器12和制动踏板传感器13各自的输出来运算驾驶员请求加速度acd。在此,驾驶员请求运算部111基于加速踏板传感器12的输出来运算正值的驾驶员请求加速度acd。驾驶员请求运算部111基于制动踏板传感器13的输出来运算负值的驾驶员请求加速度acd(即,减速度)。需要说明的是,在驾驶员请求加速度acd的运算方法中可以应用已有的各种方案,因此省略对其详情的说明。
[0041]
辅助控制部112判定是否执行减速辅助控制,或者在执行减速辅助控制时决定请求减速度de(即,通过减速辅助控制使车辆1产生的减速度的目标值)。基于通过辅助控制部112决定出的请求减速度de的信号从ecu11发送至制动系统22,由此车辆1被减速。
[0042]
辅助控制部112在减速辅助控制正在执行时通过加速踏板传感器12检测到加速踏板的操作的情况下,解除减速辅助控制的执行。此时,驾驶员正在操作加速踏板,因此驾驶员请求运算部111运算驾驶员请求加速度acd。因此,辅助控制部112在解除减速辅助控制的执行的情况下,减小请求减速度de,并且以与整个车辆1相关的请求加速度(以下,称为“系统请求加速度acs”)接近驾驶员请求加速度acd的方式决定所述系统请求加速度acs。
[0043]
(减速辅助控制的解除动作)
[0044]
参照图4的流程图,对辅助控制部112所进行的减速辅助控制的解除动作加以说明。
[0045]
在图4中,辅助控制部112判定车辆1是否处于由减速辅助控制实现的减速中(换言之,是否处于减速辅助控制的执行中)(步骤s101)。在步骤s101的处理中判定为车辆1不处于由减速辅助控制实现的减速中(即,减速辅助控制未在执行)的情况下(步骤s101:否),返回至步骤s101。
[0046]
在步骤s101的处理中判定为车辆1处于由减速辅助控制实现的减速中(即,减速辅助控制正在执行)的情况下(步骤s101:是),辅助控制部112判定驾驶员是否踩下了加速踏板(换言之,是否存在由驾驶员进行的加速踏板的操作)(步骤s102)。
[0047]
在步骤s102的处理中判定为驾驶员未踩下加速踏板的情况下(步骤s102:否),返回至步骤s101。在步骤s102的处理中判定为驾驶员踩下了加速踏板的情况下(步骤s102:是),辅助控制部112进行步骤s103以后的处理,以解除减速辅助控制的执行。
[0048]
即,辅助控制部112根据驾驶员的加速踏板的操作的程度来减少请求减速度de(步骤s103)。具体而言,辅助控制部112首先基于加速踏板传感器12的输出来推定驾驶员的加速踏板的操作的程度。需要说明的是,“加速踏板传感器12的输出”是指成为在步骤s102的
处理中判定为驾驶员踩下了加速踏板的原因的、因驾驶员的加速踏板的操作而产生的加速踏板传感器12的输出。
[0049]
在此,在加速踏板传感器12例如输出与加速踏板的行程相关的第一指标(例如行程量)的情况下,辅助控制部112可以基于所述第一指标来推定加速踏板的操作的程度。在加速踏板传感器12例如输出与加速踏板的行程的每单位时间的变化相关的第二指标(例如踩踏速度)的情况下,辅助控制部112可以基于所述第二指标来推定加速踏板的操作的程度。在加速踏板传感器12例如输出与踩踏力相关的第三指标的情况下,辅助控制部112可以基于所述第三指标来推定加速踏板的操作的程度。在加速踏板传感器12例如输出与踩踏力的每单位时间的变化相关的第四指标的情况下,辅助控制部112可以基于所述第四指标来推定加速踏板的操作的程度。在这些情况下,加速踏板的操作的程度可以被表示为第一指标、第二指标、第三指标或第四指标。
[0050]
此外,在加速踏板传感器12例如输出上述第一指标和第二指标的情况下,辅助控制部112可以基于第一指标和第二指标中的至少一方来推定加速踏板的操作的程度。在加速踏板传感器12例如输出上述第三指标和第四指标的情况下,辅助控制部112可以基于第三指标和第四指标中的至少一方来推定加速踏板的操作的程度。在加速踏板传感器12例如输出上述第一指标、第二指标、第三指标以及第四指标的情况下,辅助控制部112可以基于第一指标、第二指标、第三指标以及第四指标中的至少一个来推定加速踏板的操作的程度。在这些情况下,加速踏板的操作的程度例如既可以被表示为两个以上的指标的平方和的平方根,也可以被表示为将两个以上的指标分别设为分量的多维的指标(换言之,矢量)。
[0051]
就是说,加速踏板的操作的程度可以被表示为基于加速踏板的行程、所述行程的每单位时间的变化、加速踏板的踩踏力以及所述踩踏力的每单位时间的变化中的至少一个的指标。
[0052]
接着,辅助控制部112根据加速踏板的操作的程度来使请求减速度de减少。更具体而言,辅助控制部112可以在驾驶员的加速踏板的操作的程度比规定程度强的情况下,与加速踏板的操作的程度比所述规定程度弱的情况相比,使请求减速度de更快地减少。需要说明的是,请求减速度de的具体的减少速度例如考虑驾驶员操作加速踏板时所需要的车辆响应性等来决定即可。
[0053]
在此,“规定程度”可以是与上述的表示加速踏板的操作的程度的指标对应的指标值。在该情况下,“规定程度”是决定是否使请求减速度de相对快速地减少的指标值,既可以是预先确定的固定值,也可以是与某些物理量或参数相应的可变值。
[0054]“规定程度”可以被设定为如下的加速踏板的操作的程度:根据经验或实验或者通过模拟来求出例如加速踏板的操作的程度和与加速踏板的操作相应的驾驶员请求加速度acd的微小时间内的增加量的关系,基于所述求出的关系,所述增加量比以不会给驾驶员带来违和感的方式使请求减速度de减少的情况下的所述请求减速度de的微小时间内的减少量更大。
[0055]
例如,辅助控制部112可以在加速踏板的操作的程度为作为“规定程度”的一个例子的阈值th(参照图5a)以上的情况下,与加速踏板的操作的程度小于所述阈值th的情况相比,使请求减速度de更快地减少。在加速踏板的操作的程度由多维的指标表示的情况下,辅助控制部112可以在通过所述多维的指标示出的点位于例如图5b所示的矢量空间(在此为
二维的矢量空间)的阴影部分的情况下,与上述点位于上述矢量空间的阴影部分以外的情况相比,使请求减速度de更快地减少。在该情况下,图5b的阴影部分的边界线相当于“规定程度”的一个例子。
[0056]
在加速踏板的操作的程度小于规定程度的情况下,辅助控制部112相对缓慢地减少请求减速度de,使得例如如图6a中由实线示出的那样,加速度相对缓慢地增加(换言之,减速度(即,负加速度)相对缓慢地减少)。另一方面,在加速踏板的操作的程度为规定程度以上的情况下,辅助控制部112相对快地减少请求减速度de,使得例如如图6b中由实线示出的那样,加速度相对快地增加(换言之,减速度相对快地减少)。就是说,辅助控制部112根据加速踏板的操作的程度是否为规定程度以上来变更请求减速度de的每单位时间的变化率(即,请求减速度de的时间导数:急动度)。
[0057]
需要说明的是,图6a和图6b的时刻t1是减速辅助控制的执行开始的时刻(相当于图2的时刻t1)。时刻t2是在上述的步骤s102的处理中判定为驾驶员踩下了加速踏板的时刻(换言之,是在减速辅助控制的执行中驾驶员操作了加速踏板的时刻)。虚线表示驾驶员请求加速度acd。
[0058]
或者,辅助控制部112可以在驾驶员的加速踏板的操作的程度强的情况下,与所述操作的程度弱的情况相比,使请求减速度de更快地减少。在此,辅助控制部112可以例如如下判定加速踏板的操作的程度是强还是弱。即,辅助控制部112可以在表示加速踏板的操作的程度的指标的值为阈值th(参照图5a)以上的情况下判定为操作的程度强,在所述指标的值小于阈值th的情况下判定为操作的程度弱。在加速踏板的操作的程度由多维的指标表示的情况下,辅助控制部112可以在通过所述多维的指标示出的点位于例如图5b所示的矢量空间(在此为二维的矢量空间)的阴影部分的情况下判定为操作的程度强,在上述点位于上述矢量空间的阴影部分以外的情况下判定为操作的程度弱。
[0059]
在判定为加速踏板的操作的程度弱的情况下,辅助控制部112相对缓慢地减少请求减速度de,使得例如如图6a中由实线示出的那样,加速度相对缓慢地增加(换言之,减速度(即,负加速度)相对缓慢地减少)。另一方面,在判定为加速踏板的操作的程度强的情况下,辅助控制部112相对快地减少请求减速度de,使得例如如图6b中由实线示出的那样,加速度相对快地增加(换言之,减速度相对快地减少)。就是说,辅助控制部112根据加速踏板的操作的程度是强还是弱来变更请求减速度de的每单位时间的变化率(即,请求减速度de的时间导数:急动度)。
[0060]
返回至图4,在步骤s103的处理之后,辅助控制部112判定请求减速度de是否为0(步骤s104)。在步骤s104的处理中判定为请求减速度de不为0的情况下(步骤s104:否),进行步骤s103的处理。
[0061]
在步骤s104的处理中判定为请求减速度de为0的情况下(步骤s104:是),辅助控制部112基于请求减速度de的急动度来决定系统请求加速度acs(步骤s105)。
[0062]
参照图6a和图6b,对步骤s105的处理加以说明。在图6a中,设为在时刻t3请求减速度de变为0。辅助控制部112例如以系统请求加速度acs以与请求减速度de的急动度同样的时间变化率增加的方式决定系统请求加速度acs(将图6a的表示从时刻t2起至时刻t3为止的加速度的实线的斜率与表示从时刻t3起至时刻t4为止的加速度的实线的斜率相比较)。
[0063]
在图6b中,设为在时刻t5请求减速度de变为0。辅助控制部112例如以系统请求加
速度acs以与请求减速度de的急动度同样的时间变化率增加的方式决定系统请求加速度acs(将图6b的表示从时刻t2起至时刻t5为止的加速度的实线的斜率与表示从时刻t5起至时刻t6为止的加速度的实线的斜率相比较)。
[0064]
返回至图4,在步骤s105的处理之后,辅助控制部112判定系统请求加速度acs是否为驾驶员请求加速度acd以上(步骤s106)。在步骤s106的处理中判定为系统请求加速度acs小于驾驶员请求加速度acd的情况下(步骤s106:否),进行步骤s105的处理。
[0065]
在步骤s106的处理中判定为系统请求加速度acs为驾驶员请求加速度acd以上的情况下(步骤s106:是),辅助控制部112结束减速辅助控制的解除动作。之后,基于驾驶员请求加速度acd来决定系统请求加速度acs。此时,系统请求加速度acs既可以由驾驶员请求运算部111决定,也可以由辅助控制部112决定。
[0066]
例如,若设为在图6a的时刻t4,在上述步骤s106的处理中判定为系统请求加速度acs为驾驶员请求加速度acd以上,则结束减速辅助控制的解除动作,之后,加速度会基于驾驶员请求加速度acd而变化。同样地,若设为在图6b的时刻t6,在上述步骤s106的处理中判定为系统请求加速度acs为驾驶员请求加速度acd以上,则结束减速辅助控制的解除动作,之后,加速度会基于驾驶员请求加速度acd而变化。
[0067]
需要说明的是,虽然在上述的说明中为了方便而没有明确记载,但在进行步骤s103和步骤s104的处理时,也是辅助控制部112决定系统请求加速度acs。因此,在进行步骤s103和步骤s104的处理的期间(例如图6a的从时刻t2起至时刻t3为止的期间、图6b的从时刻t2起至时刻t5为止的期间),基于请求减速度de的信号从ecu11发送至制动系统22,并且基于系统请求加速度acs的信号从ecu11发送至驱动系统21。
[0068]
(技术效果)
[0069]
在减速辅助控制正在执行时所述减速辅助控制的执行因驾驶员的加速踏板的操作而被解除的情况下,如果不采取任何对策,则驾驶员恐怕会感觉到减速度的急剧变化。对此,在驾驶辅助装置100中,根据驾驶员的加速踏板的操作的程度来减少请求减速度de。具体而言,在加速踏板的操作的程度为规定程度以上的情况下,与所述操作的程度小于所述规定程度的情况相比,请求减速度de更快地减少,或者,在所述操作的程度强的情况下,与所述操作的程度弱的情况相比,请求减速度de更快地减少。换言之,在驾驶辅助装置100中,在驾驶员的加速踏板的操作的程度小于规定程度的情况下,与所述操作的程度为所述规定程度以上的情况相比,请求减速度de更慢地减少,或者,在所述操作的程度弱的情况下,与所述操作的程度强的情况相比,请求减速度de更慢地减少。
[0070]
例如如图6b所示,在加速踏板的操作的程度相对强的情况下,加速度相对提前地从负转为正。因此,在驾驶员的感觉中,大多在感觉到减速度的变化不久就感觉到车辆1正在加速。就是说,在该情况下,在解除减速辅助控制的执行时驾驶员感到违和感的可能性小。另一方面,例如如图6a所示,在加速踏板的操作的程度相对弱的情况下,加速度相对缓慢地变化。在该情况下,在解除减速辅助控制的执行时驾驶员感到违和感的可能性极小。
[0071]
因此,根据驾驶辅助装置100,在减速辅助控制因驾驶员的加速踏板的操作而被解除时,能抑制驾驶员感到违和感。
[0072]
<变形例>
[0073]
在上述的实施方式中,例如列举了使用阈值th(参照图5a)来判定加速踏板的操作
的程度是强还是弱的方案。然而,用于所述判定的阈值不限于一个,也可以是多个。就是说,可以分多级地判定加速踏板的操作的程度。在该情况下,可以是,加速踏板的操作的程度越强,请求减速度de越快地减少。或者,也可以根据加速踏板的操作的程度来连续地变更请求减速度de的减少的程度。在该情况下,也可以是,加速踏板的操作的程度越强,请求减速度de越快地减少。
[0074]
可以根据减速辅助控制的执行的解除开始之后的、由驾驶员进行的加速踏板的操作来变更请求减速度de的减少的程度。例如如图7所示,在时刻t2开始减速辅助控制的执行的解除,并且加速踏板的行程量在时刻t7增加了的情况下,辅助控制部112可以增大请求减速度de的急动度,使得请求减速度de更快地减少(将图7的表示从时刻t2起至时刻t7为止的加速度的实线的斜率与表示从时刻t7起至时刻t8为止的加速度的实线的斜率相比较)。
[0075]
以下,对从以上说明过的实施方式和变形例导出的发明的各种方案进行说明。
[0076]
发明的一个方案的驾驶辅助装置是在本车辆的驾驶员未踩踏加速踏板时能执行使所述本车辆自动地减速的减速辅助控制的驾驶辅助装置,所述驾驶辅助装置具备:检测部,检测所述加速踏板的操作;以及控制部,在所述减速辅助控制正在执行时检测到所述加速踏板的操作的情况下,解除所述减速辅助控制的执行,所述控制部是如下这样的控制部:在解除所述减速辅助控制的执行时,根据所述加速踏板的操作的程度来使与所述减速辅助控制相关的减速控制量减少。
[0077]
在上述的实施方式中,“车辆1”相当于“本车辆”的一个例子,“加速踏板传感器12”相当于“检测部”的一个例子,“辅助控制部112”相当于“控制部”的一个例子。上述的实施方式的“请求减速度de”相当于“减速控制量”的一个例子。
[0078]
在所述驾驶辅助装置中,也可以是,所述控制部在解除所述减速辅助控制的执行时,在所述加速踏板的操作的程度比规定程度强的情况下,与所述操作的程度比所述规定程度弱的情况相比,使与所述减速辅助控制相关的减速控制量更快地减少。
[0079]
在所述驾驶辅助装置中,也可以是,所述控制部在解除所述减速辅助控制的执行时,在所述加速踏板的操作的程度强的情况下,与所述操作的程度弱的情况相比,使与所述减速辅助控制相关的减速控制量更快地减少。
[0080]
在所述驾驶辅助装置中,也可以是,所述控制部在解除所述减速辅助控制的执行时,所述加速踏板的操作的程度越强,使与所述减速辅助控制相关的减速控制量越快地减少。
[0081]
在所述驾驶辅助装置中,也可以是,所述操作的程度被表示为基于所述加速踏板的行程、所述行程的每单位时间的变化、所述加速踏板的踩踏力以及所述踩踏力的每单位时间的变化中的至少一个的指标。
[0082]
在所述驾驶辅助装置中,也可以是,所述控制部在解除所述减速辅助控制的执行时,基于所述减速控制量和根据所述加速踏板的操作推定的驾驶员的请求加速度来决定与所述本车辆相关的目标加速度,所述控制部在所述目标加速度比所述请求加速度小的情况下,以所述目标加速度的时间变化与所述减速控制量的时间变化对应的方式决定所述目标加速度,在所述目标加速度达到了所述请求加速度的情况下,以所述目标加速度的时间变化与所述请求加速度的时间变化对应的方式决定所述目标加速度。
[0083]
在上述的实施方式中,“驾驶员请求加速度acd”相当于“请求加速度”的一个例子,“系统请求加速度acs”相当于“目标加速度”的一个例子,“请求减速度de的急动度”相当于“减速控制量的时间变化”的一个例子。
[0084]
在所述驾驶辅助装置中,也可以是,所述控制部在解除所述减速辅助控制的执行时,根据所述减速辅助控制的执行的解除开始之后的所述加速踏板的操作来变更所述减速控制量的减少方式。
[0085]
在所述驾驶辅助装置中,也可以是,所述减速辅助控制在所述驾驶员未踩踏所述加速踏板并且所述本车辆的减速度为规定值以下时被执行。
[0086]
在所述驾驶辅助装置中,也可以是,所述减速辅助控制在所述驾驶员未踩踏所述加速踏板并且需要所述本车辆的减速或停止的减速对象与所述本车辆之间的距离为规定距离以上时被执行。
[0087]
本发明不限于上述的实施方式,可以在不违背能从权利要求书和整个说明书理解的发明的主旨或者思想的范围内适当变更,伴有这样的变更的驾驶辅助装置也包括在本发明的技术范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1