除尘执行机器人的制作方法
1.本实用新型涉及除尘设备技术领域,尤其是涉及一种除尘执行机器人。
背景技术:
2.随着新能源技术的不断发展,传统公交车逐渐被电动公交所代替;电动公交具有环保节能的优点,但是由于电动公交是电力驱动,车辆电气舱十分容易积灰。灰尘具有导电性,当积尘过多时,容易造成电机等电气元件短路,从而使得电机等电气元件损坏。同时车辆电气舱积灰过多会影响电机等电气部件的散热性能,使得电机长期在高温下工作,降低电机的使用寿命。又因为电动公交车的电气舱不能直接用水清洁,因此电动公交车电气舱的清理通常采用吹扫的方式进行除尘。
3.现有技术中,针对电动公交车电气舱的除尘过程中,是将电动公交车开至除尘车间后,由于机械无法满足不同高度位置舱内除尘,无法实现自动化以及统一标准,从而只能通过操作工人手持压缩空气或者风机进行吹尘;但是,人工除尘不仅耗时长,清洁效率低,而且每当进行除尘操作时,灰尘四散,弥漫的灰尘对人和环境都造成了极大的危害。
技术实现要素:
4.本实用新型的目的在于提供一种除尘执行机器人,以缓解现有技术中存在的机械除尘无法满足不同高度位置舱内除尘,无法实现自动化除尘,通过人工除尘会对人和环境会造成危害的技术问题。
5.本实用新型提供的一种除尘执行机器人,包括:执行主体、移动机构、抬升机构和除尘机构;
6.所述移动机构与所述执行主体连接,所述抬升机构与所述执行主体远离所述移动机构的一端连接,所述移动机构用于通过所述执行主体带动所述抬升机构在水平方向移动,所述除尘机构与所述抬升机构远离所述执行主体的一端连接,所述抬升机构用于带动所述除尘机构在竖直方向移动,以使所述除尘机构能够作用车辆的电气舱内。
7.在本实用新型较佳的实施例中,还包括控制机构;
8.所述控制机构分别与所述移动机构和所述抬升机构电信号连接,所述控制机构用于接收外部中控台的控制信号,对应控制所述移动机构和所述抬升机构的启闭。
9.在本实用新型较佳的实施例中,所述移动机构包括移动轮和导向组件;
10.所述移动轮设置有多个,多个所述移动轮沿着所述执行主体的两侧对称设置,所述移动轮用于带动所述执行主体移动;
11.所述导向组件与所述执行主体靠近地面的一侧连接,所述导向组件用于限定所述执行主体的移动路径。
12.在本实用新型较佳的实施例中,所述导向组件包括导向轮组;
13.沿着所述执行主体移动路径的地面上设置有导轨,所述导向轮组设置有多组,多组所述导向轮组沿着所述导轨的延伸方式布置,每组所述导向轮组包括至少两个导向轮,
其中两个导向轮相对于所述导轨呈对称布置,且每个所述导向轮与所述导轨滑动连接,每个导向轮分别与所述执行主体连接,多组所述导向轮组用于限定所述执行主体沿着所述导轨的延伸方向移动。
14.在本实用新型较佳的实施例中,所述导轨的两侧设置有卡槽,所述导向轮卡设于所述卡槽内。
15.在本实用新型较佳的实施例中,还包括配重机构;
16.所述配重机构设置有多个,多个所述配重机构分别与所述执行主体连接,且多个所述配重机构沿着相对于所述导轨的两侧呈对称布置。
17.在本实用新型较佳的实施例中,所述抬升机构包括升降主体和驱动机械臂;
18.所述升降主体位于所述执行主体上,所述驱动机械臂的一端与所述升降主体固定连接,所述驱动机械臂的另一端与所述除尘机构连接,所述升降主体用于带动所述驱动机械臂在竖直方向往复移动。
19.在本实用新型较佳的实施例中,所述驱动机械臂包括固定立臂、转动臂和转动头;
20.所述固定立臂呈竖直设置,且所述固定立臂的一端与所述升降主体连接,所述固定立臂的另一端与所述转动臂转动连接,所述转动臂用于以所述固定立臂的端部转动,所述转动头与所述转动臂远离所述固定立臂的一端转动连接,所述转动头用于以所述转动臂的端部转动,所述除尘机构位于所述转动头上;
21.所述转动臂的转动方向与所述转动头的转动方向呈平行设置。
22.在本实用新型较佳的实施例中,所述除尘机构包括除尘风机;
23.所述除尘风机与所述转动头固定连接,所述除尘风机的出口朝向车辆的电气舱,且所述转动头用于带动所述除尘风机沿着平行于车辆的电气舱的平面转动。
24.在本实用新型较佳的实施例中,还包括固定底座;
25.所述固定底座设置有安装平台,所述固定底座的一端与所述转动头固定连接,所述除尘风机安装于所述安装平台上。
26.本实用新型提供的一种除尘执行机器人,包括:执行主体、移动机构、抬升机构和除尘机构;移动机构与执行主体连接,抬升机构与执行主体远离移动机构的一端连接,移动机构用于通过执行主体带动抬升机构在水平方向移动,除尘机构与抬升机构远离执行主体的一端连接,抬升机构用于带动除尘机构在竖直方向移动,以使除尘机构能够作用车辆的电气舱内;通过移动机构能够使得执行主体沿着车辆的车身侧进行移动,当到达车辆的电气舱位置后,抬升机构通过带动除尘机构运行至电气舱位置,利用除尘机构对车辆的电气舱内部进行除尘,缓解了现有技术中存在的机械除尘无法满足不同高度位置舱内除尘,无法实现自动化除尘,通过人工除尘会对人和环境会造成危害的技术问题。
附图说明
27.为了更清楚地说明本实用新型具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
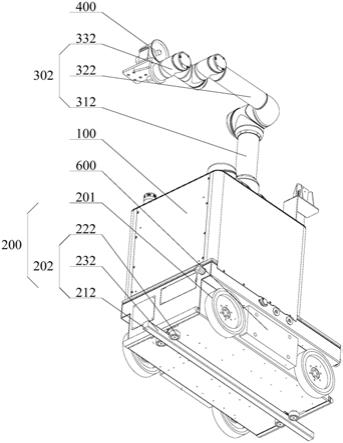
28.图1为本实用新型实施例提供的除尘执行机器人的整体结构示意图;
29.图2为本实用新型实施例提供的除尘执行机器人的内部结构示意图;
30.图3为本实用新型实施例提供的除尘执行机器人的固定底座位置处的局部放大结构示意图。
31.图标:100
‑
执行主体;200
‑
移动机构;201
‑
移动轮;202
‑
导向组件;212
‑
导轨;222
‑
导向轮;232
‑
卡槽;300
‑
抬升机构;301
‑
升降主体;302
‑
驱动机械臂;312
‑
固定立臂;322
‑
转动臂;332
‑
转动头;400
‑
除尘机构;500
‑
控制机构;600
‑
配重机构;700
‑
固定底座。
具体实施方式
32.下面将结合实施例对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
33.如图1
‑
图3所示,本实施例提供的一种除尘执行机器人,包括:执行主体100、移动机构200、抬升机构300和除尘机构400;移动机构200与执行主体100连接,抬升机构300与执行主体100远离移动机构200的一端连接,移动机构200用于通过执行主体100带动抬升机构300在水平方向移动,除尘机构400与抬升机构300远离执行主体100的一端连接,抬升机构300用于带动除尘机构400在竖直方向移动,以使除尘机构400能够作用车辆的电气舱内。
34.需要说明的是,本实施例提供的除尘执行机器人设置于除尘车间内部,其中,需要除尘的车辆按照规定位置开至除尘车间内部,其中,执行主体100位于需要除尘的车辆的一侧,并且需要除尘的车辆在进入到除尘车间时,会经过除尘车间的检测机构,此时能够得知车辆的电气舱位于车辆的具体位置,移动机构200能够带动执行主体100运行至车辆的电气舱位置处,抬升机构300能够相对于执行主体100在竖直方向进行移动,从而能够带动除尘机构400正对应车辆的电气舱,通过开启除尘机构400能够对车辆的电气舱内覆盖的扬尘进行清理。
35.本实施例提供的一种除尘执行机器人,包括:执行主体100、移动机构200、抬升机构300和除尘机构400;移动机构200与执行主体100连接,抬升机构300与执行主体100远离移动机构200的一端连接,移动机构200用于通过执行主体100带动抬升机构300在水平方向移动,除尘机构400与抬升机构300远离执行主体100的一端连接,抬升机构300用于带动除尘机构400在竖直方向移动,以使除尘机构400能够作用车辆的电气舱内;通过移动机构200能够使得执行主体100沿着车辆的车身侧进行移动,当到达车辆的电气舱位置后,抬升机构300通过带动除尘机构400运行至电气舱位置,利用除尘机构400对车辆的电气舱内部进行除尘,缓解了现有技术中存在的机械除尘无法满足不同高度位置舱内除尘,无法实现自动化除尘,通过人工除尘会对人和环境会造成危害的技术问题。
36.在上述实施例的基础上,进一步地,在本实用新型较佳的实施例中,还包括控制机构500;控制机构500分别与移动机构200和抬升机构300电信号连接,控制机构500用于接收外部中控台的控制信号,对应控制移动机构200和抬升机构300的启闭。
37.本实施例中,控制机构500可以采用多种,例如:mcu,cpu,plc控制器等,较佳地,控制机构500为mcu。微控制单元(microcontroller unit;mcu),又称单片微型计算机或者单片机,是把中央处理器的频率与规格做适当缩减,并将内存、计数器、usb、a/d转换、uart、
plc、dma等周边接口,甚至lcd驱动电路都整合在单一芯片上,形成芯片级的计算机,为不同的应用场合做不同组合控制。
38.其中,控制机构500能够与双编码器定位机构电信号连接,其中,双编码器定位机构位于除尘车间内部,并且双编码器定位机构能够对待除尘车辆进行位置检测,并将待除尘车辆的电气舱位置输送至控制机构500,控制机构500根据此位置进行能够控制移动机构200的水平移动路径和抬升机构300在竖直方向的抬升路径,从而能够保证除尘机构400能够作用于车辆的电气舱位置,实现了对不同车辆,车辆不同位置电气舱内覆盖扬尘清理。
39.在本实用新型较佳的实施例中,移动机构200包括移动轮201和导向组件202;移动轮201设置有多个,多个移动轮201沿着执行主体100的两侧对称设置,移动轮201用于带动执行主体100移动;导向组件202与执行主体100靠近地面的一侧连接,导向组件202用于限定执行主体100的移动路径。
40.本实施例中,移动轮201可以采用电动移动小车的移动轮201,移动轮201可以通过驱动电机进行驱动,利用移动轮201的驱动作用,能够使得执行主体100在水平方向进行移动;可选地,移动轮201可以设置有四个甚至更多个,利用多个移动轮201呈对称布置在执行主体100的两侧,能够更好的保证执行主体100的移动。
41.其中,由于执行主体100位于除尘车间内部,并且待除尘车辆会按照执行方向进入到除尘车间内部,因此,为了保证执行主体100能够沿着待除尘车辆的车身侧进行移动,执行主体100通过导向组件202能够与除尘车间的地面进行滑动连接,利用导向组件202的导向作用,能够更好的保证执行主体100的移动方向;另外由于导向组件202的导向作用能够避免扬尘对移动及运动的影响。
42.在本实用新型较佳的实施例中,导向组件202包括导向轮组;沿着执行主体100移动路径的地面上设置有导轨,导向轮组设置有多组,多组导向轮组沿着导轨212的延伸方式布置,每组导向轮组包括至少两个导向轮222,其中两个导向轮222相对于导轨212呈对称布置,且每个导向轮222与导轨212滑动连接,每个导向轮222分别与执行主体100连接,多组导向轮组用于限定执行主体100沿着导轨212的延伸方向移动。
43.本实施例中,导轨212与除尘车间的地面固定连接,并且导轨212的延伸方向与待除尘车辆的延伸呈平行设置,导向轮组设置有至少两组,两组导向轮组分别沿着导轨212的延伸方向布置,通过至少两组的导向轮组能够使得执行主体100会沿着导轨212的延伸方向进行移动;进一步地,每一组导向轮组包括至少两个导向轮222,其中,两个导向轮222分别位于导轨212的两侧,并且每个导向轮222均与导轨212滑动连接,当移动轮201带动执行主体100进行移动时,此时导向轮222会沿着导轨212的两侧表面进行滚动,利用导向轮222的导向作用,保证了执行主体100会沿着导轨212的延伸方向往复移动。
44.为了防止执行主体100在移动过程中,导向轮222会与导轨212发生脱轨,在本实用新型较佳的实施例中,导轨212的两侧设置有卡槽232,导向轮222卡设于卡槽232内。
45.在本实用新型较佳的实施例中,还包括配重机构600;配重机构600设置有多个,多个配重机构600分别与执行主体100连接,且多个配重机构600沿着相对于导轨212的两侧呈对称布置。
46.由于执行主体100与抬升机构300连接,抬升机构300在上升的过程中,会存在导致执行主体100重心抬升,执行主体100容易发生侧翻的可能性,为了保证执行主体100的稳定
性,在执行主体100的两侧可以安装有多个配重机构600,从而能够保证执行主体100的稳定性;可选地,配重机构600可以采用配重板或者配重块,配重机构600可以通过卡接或者螺栓连接的方式固定在执行主体100上。
47.在本实用新型较佳的实施例中,抬升机构300包括升降主体301和驱动机械臂302;升降主体301位于执行主体100上,驱动机械臂302的一端与升降主体301固定连接,驱动机械臂302的另一端与除尘机构400连接,升降主体301用于带动驱动机械臂302在竖直方向往复移动。
48.本实施例中,升降主体301可以采用升降电机,也可以采用升降液压缸,其中,执行主体100可以采用矩形壳体,升降主体301位于执行主体100的内部,并且执行主体100远离移动机构200的一端可以设置有开孔,升降主体301能够沿着开孔伸出执行主体100内部,升降主体301能够带动驱动机械臂302在竖直方向往复移动。
49.驱动机械臂302以采用机械臂,机械臂采用具有动力驱动的机械臂,具体地,机械臂是机械人技术领域中得到最广泛实际应用的自动化机械装置,机械手臂根据结构形式的不同分为多关节机械手臂,直角坐标系机械手臂,球坐标系机械手臂,极坐标机械手臂,柱坐标机械手臂等;机械臂具有六个自由度,通过机械臂的作用能够带动除尘机构400到达空间内的任何坐标点,进而通过除尘机构400对车辆电气舱的多个角度位置进行全面的吹扫。
50.在本实用新型较佳的实施例中,驱动机械臂302包括固定立臂312、转动臂322和转动头332;固定立臂312呈竖直设置,且固定立臂312的一端与升降主体301连接,固定立臂312的另一端与转动臂322转动连接,转动臂322用于以固定立臂312的端部转动,转动头332与转动臂322远离固定立臂312的一端转动连接,转动头332用于以转动臂322的端部转动,除尘机构400位于转动头332上。
51.在本实用新型较佳的实施例中,转动臂322的转动方向与转动头332的转动方向呈平行设置。
52.本实施例中,固定立臂312可以通过螺栓与升降主体301固定连接,升降主体301能够带动固定立臂312在竖直方向往复移动,并且转动臂322与固定立臂312转动连接,从而转动臂322能够相对于固定立臂312在待除尘车辆的一侧转动,转动头332与转动臂322转动连接,从而转动头332能够带动除尘机构400在电气舱的多个位置和多个角度进行除尘吹扫;利用转动臂322能够使得除尘机构400在车辆的电气舱一侧形成多方位的转动,再利用转动头332能够使得除尘机构400在车辆的电气舱一侧形成多角度的转动,从而能够针对不同种类的电气舱运动路径进行覆盖,利用驱动机械臂302整体带动除尘机构400进行电气舱多位置、多角度吹尘。
53.在本实用新型较佳的实施例中,除尘机构400包括除尘风机;除尘风机与转动头332固定连接,除尘风机的出口朝向车辆的电气舱,且转动头332用于带动除尘风机沿着平行于车辆的电气舱的平面转动。
54.在本实用新型较佳的实施例中,还包括固定底座700;固定底座700设置有安装平台,固定底座700的一端与转动头332固定连接,除尘风机安装于安装平台上。
55.本实施例中,固定底座700包括安装平台和固定立板,其中,安装平台与固定立板呈垂直设置且固定连接;可选地,安装平台和固定立板之间设置有加强肋,加强肋的第一面与安装平台下表面相连接,第二面与固定立板远离转动头332的一面相连接,固定立板与转
动头332固定连接,除尘风机可以通过螺栓固定在安装平台上,为了可以更好的对除尘风机吹下的尘土进行渗漏,安装平台的表面可以均匀布置有多个通孔。
56.可选地,除尘风机可以采用高速涵道吹尘风机,并且除尘风机上具有喷头,高压气体通过喷头吹扫电气舱内部,经过压缩的空气能够通过喷头喷射高压气体朝向车辆电气舱中的部件进行喷射,由于高压气体经由喷头喷出的气体喷射力大于灰尘在部件上的附着力,从而能够使得灰尘与车辆电气舱内部部件的灰尘进行分离,达到吹扫的效果。
57.最后应说明的是:以上各实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1