一种能够四轮转向的儿童接送机器人
1.本实用新型属于机器人技术领域,特别涉及一种能够四轮转向的儿童接送机器人。
背景技术:
2.现如今成年人生活在快节奏与忙碌的生活中,因此大多数成年人对于家里儿童的照料就会比较难以保障,尤其是儿童上下学的接送问题,为了解决这种问题出现了儿童接送车辆。
3.往往在接送儿童时,经过的路况会比较狭小,现有的儿童接送车辆均采用两轮转动,两轮转动半径大,掉头所需空间大,不能够在狭小地带进行转向掉头,不够灵活,因此设计一种能够四轮转向的儿童接送机器人便十分必要。
技术实现要素:
4.本实用新型的目的是针对现有技术中存在的上述问题,提供了一种能够四轮转向的儿童接送机器人。
5.本实用新型的目的可通过下列技术方案来实现:一种能够四轮转向的儿童接送机器人,其特征在于,包括车体、设置于车体上的四个车轮、自动驾驶装置、转向机构及驱动机构,驱动机构用于驱动车轮转动,所述转向机构用于控制所述车轮转向,四个所述车轮均连接有所述转向机构及驱动机构,所述车体设置有乘坐室,所述乘坐室用于供人乘坐,所述自动驾驶装置用于规划路线及控制车体行驶,所述车体内设置有中央处理器,所述中央处理器用于控制所述自动驾驶装置、转向机构及驱动机构,所述驱动机构包括驱动电机及传动连杆,所述驱动电机连接所述传动连杆一端,所述传动连杆另一端通过第一锥齿轮连接有竖杆,所述竖杆底部通过第二锥齿轮连接有第三横杆,所述第三横杆端部与所述车轮转轴固定,所述第三横杆与所述竖杆外部套设有衬套,所述衬套底部与所述第三横杆固定连接,所述衬套顶部一侧延伸有凸块,所述转向机构包括转向电机、转向盘及转向杆,所述转向盘轴心与所述转向电机输出轴固定连接,所述转向杆端部旋转连接于所述转向盘的边缘。
6.本实用新型的工作原理:当需要接送儿童时,中央处理器会控制自动驾驶装置设定好行驶路线,接送儿童时儿童乘坐到乘坐室内,在接送时,驱动电机会通过传动连杆将动力依次传输至竖杆、第三横杆,最后到达车轮,车体便能够移动;当需要转向时,中央处理器会控制转向电机工作带动转向盘转动,转向盘转动带动转向杆运动,转向杆运动带动衬套转动改变车轮的角度完成转向;在遇到需要在狭小空间内掉头的情况时,由于每个车轮都配套有一个转向机构和驱动机构,因此四个车轮能够同时进行转向工作,每个车轮都能够转动四十五度,整个车体便能够在很小的空间内完成掉头,方便实用。
7.在上述的能够四轮转向的儿童接送机器人中,所述传动连杆包括第一横杆、总连接杆及第二横杆,所述总连接杆包括第一连接杆及第二连接杆,所述第一连接杆上设置有第一腰孔,所述第二连接杆设置有第二腰孔,所述第一连接杆一端设置有第一插销,所述第
一连接杆另一端通过第一万向接头连接所述第一横杆,所述第一横杆与所述驱动电机连接,所述第二连接杆上设置有第二插销,所述第二连接杆另一端通过第二万向接头连接所述第二横杆,所述第二横杆通过所述第一锥齿轮与所述竖杆连接。
8.在上述的能够四轮转向的儿童接送机器人中,所述第一插销位于所述第二腰孔内并沿第二腰孔的长度方向移动,所述第一插销端部固定设置有第一限位环,所述第二插销位于所述第一腰孔内并沿第二腰孔的长度方向移动,所述第二插销端部固定设置有第二限位环,所述第一限位环及第二限位环配合将第一连接杆及第二连接杆拼合组成总连接杆。
9.在上述的能够四轮转向的儿童接送机器人中,所述第二横杆上设置有离合器,所述离合器包括与第二横杆固定的连接部及工作部,所述工作部连接有第一离合电机,所述第一离合电机用于驱动工作部上升抬起第二横杆。
10.在上述的能够四轮转向的儿童接送机器人中,所述工作部垂直于所述连接部设置,所述工作部上沿工作部长度方向设置有齿槽。
11.在上述的能够四轮转向的儿童接送机器人中,所述第一离合电机输出轴连接有驱动齿轮,所述驱动齿轮与所述齿槽啮合。
12.在上述的能够四轮转向的儿童接送机器人中,所述第一离合电机一侧设置有限位块,所述限位块开设有限位通道,所述限位通道用于供所述工作部穿设。
13.在上述的能够四轮转向的儿童接送机器人中,所述第二横杆上设置有离合器,所述离合器包括夹持架及第一转动杆及第二转动杆,所述夹持架用于夹持所述第二横杆,所述夹持架顶部设置有连接块,所述连接块与所述第一转动杆一端转动连接,所述第一转动杆另一端与所述第二转动杆一端转动连接,所述第二转动杆另一端连接有第二离合电机。
14.在上述的能够四轮转向的儿童接送机器人中,所述车体后部设置有拉手,所述拉手用于供人把握拉动车体。
15.在上述的能够四轮转向的儿童接送机器人中,所述车体内设置有电源,所述电源用于供电,所述电源采用蓄电池。
16.与现有技术相比,本实用新型具有能够接送儿童且能够四轮转向的优点。
附图说明
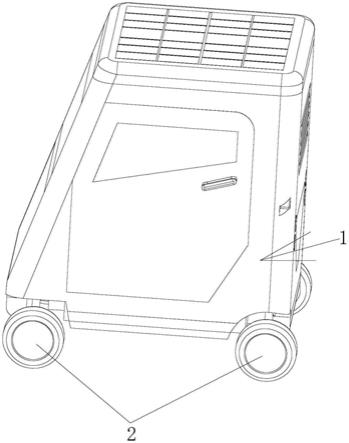
17.图1是本实用新型的结构示意图。
18.图2是本实用新型的结构示意图。
19.图3是本实用新型中转向机构及驱动机构的结构示意图。
20.图4是本实用新型中衬套的剖面结构示意图。
21.图5是本实用新型中传动连杆一侧面的结构示意图。
22.图6是本实用新型中传动连杆另一侧面的结构示意图。
23.图7是本实用新型中离合器的结构示意图。
24.图中,1、车体;2、车轮;3、自动驾驶装置;4、转向机构;5、驱动机构;6、乘坐室;7、中央处理器;8、驱动电机;9、传动连杆;10、第一锥齿轮;11、竖杆;12、第二锥齿轮;13、第三横杆;14、衬套;15、凸块;16、转向电机;17、转向盘;18、转向杆;19、第一横杆;20、第二横杆;21、总连接杆;22、第一连接杆;23、第二连接杆;28、第一万向接头;29、第二万向接头;30、第一插销;31、第二插销;32、第一腰孔;33、第二腰孔;34、第一限位环;35、第二限位环;36、离
合器;37、连接部;38、工作部;39、第一离合电机;40、齿槽;41、驱动齿轮;42、限位块;43、限位通道;44、夹持架;45、第一转动杆;46、第二转动杆;47、连接块;48、第二离合电机;49、拉手;50、电源。
具体实施方式
25.以下是本实用新型的具体实施例并结合附图,对本实用新型的技术方案作进一步的描述,但本实用新型并不限于这些实施例。
26.为了使得图片表达更加清楚,图5中将第二限位35环省略,图6中将第一限位环34省略。
27.如图1
‑
图7所示,本能够四轮转向的儿童接送机器人包括车体1、设置于车体1上的四个车轮2、自动驾驶装置3、转向机构4及驱动机构5,驱动机构5用于传递动力,转向机构4用于控制车轮2转向,四个车轮2均连接有转向机构4及驱动机构5,车体1设置有乘坐室6,乘坐室6用于供人乘坐,自动驾驶装置3用于规划路线及控制车体1行驶,车体1内设置有中央处理器7,中央处理器7用于控制自动驾驶装置3、转向机构4及驱动机构5,驱动机构5包括驱动电机8及传动连杆9,驱动电机8连接传动连杆9一端,传动连杆9另一端通过第一锥齿轮10连接有竖杆11,竖杆11底部通过第二锥齿轮12连接有第三横杆13,第三横杆13端部与车轮2转轴固定,第三横杆13与竖杆11外部套设有衬套14,衬套14底部与第三横杆13固定连接,衬套14顶部一侧延伸有凸块15,转向机构4包括转向电机16、转向盘17及转向杆18,转向盘17轴心与转向电机16输出轴固定连接,转向杆18端部旋转连接于转向盘17的边缘。
28.进一步细说,传动连杆9包括第一横杆19、总连接杆21及第二横杆20,总连接杆21包括第一连接杆22及第二连接杆23,第一连接杆22上设置有第一腰孔32,第二连接杆23设置有第二腰孔33,第一连接杆22一端设置有第一插销30,第一连接杆22另一端通过第一万向接头28连接第一横杆19,第一横杆19与驱动电机8连接,第二连接杆23上设置有第二插销31,第二连接杆23另一端通过第二万向接头29连接第二横杆20,第二横杆20通过第一锥齿轮10与竖杆11连接。
29.进一步细说,第一插销30位于第二腰孔33内并沿第二腰孔33的长度方向移动,第一插销30端部固定设置有第一限位环34,第二插销31位于第一腰孔32内并沿第二腰孔33的长度方向移动,第二插销31端部固定设置有第二限位环35,第一限位环34及第二限位环35配合将第一连接杆22及第二连接杆23拼合组成总连接杆21;第一连接杆22和第二连接杆23通过插销能够在腰孔的长度方向移动的设置使得总连接杆21的长度能够根据不同情况改变,而第一限位环34和第二限位环35的设置又能够将第一连接杆22及第二连接杆23牢固的紧固在一起,使得第一连接杆22及第二连接杆23不会散开。
30.进一步细说,第二横杆20上设置有离合器36,离合器36包括与第二横杆20固定的连接部37及工作部38,工作部38连接有第一离合电机39,第一离合电机39用于驱动工作部38上升抬起第二横杆20。
31.进一步细说,工作部38垂直于连接部37设置,工作部38上沿工作部38长度方向设置有齿槽40。
32.进一步细说,第一离合电机39输出轴连接有驱动齿轮41,驱动齿轮41与齿槽40啮合,实施例一,第一离合电机39使得驱动齿轮41转动带动工作部38上升将第二横杆20抬起,
竖杆11便失去动力,之后第一离合电机39使得驱动齿轮41反方向转动带动工作部38下降,竖杆11便又得到了动力,实现动力的输送及切断。
33.进一步细说,第一离合电机39一侧设置有限位块42,限位块42开设有限位通道43,限位通道43用于供工作部38穿设,能够保证工作部38的上升轨迹,防止工作部38上升轨迹偏移而造成意外出现。
34.进一步细说,第二横杆20上设置有离合器36,离合器36包括夹持架44及第一转动杆45及第二转动杆46,夹持架44用于夹持第二横杆20,夹持架44顶部设置有连接块47,连接块47与第一转动杆45一端转动连接,第一转动杆45另一端与第二转动杆46一端转动连接,第二转动杆46另一端连接有第二离合电机48,实施例二,第二离合电机48启动使得第二转动杆46转动,第二转动杆46转动带动第一转动杆45转动,第一转动杆45转动将夹持架44抬升使得第二横杆20上升,第二横杆20与竖杆11断开连接,完成传动的切断,同样第二离合电机48反方向转动使得第二转动杆46转动,第二转动杆46转动带动第一转动杆45转动,第一转动杆45转动将夹持架44抬升使得第二横杆20上升,第二横杆20与竖杆11连接,实现传动的对接。
35.进一步细说,车体1后部设置有拉手49,拉手49用于供人把握拉动车体1,在车体1没电时,能够方便的通过拉手49拉动车体1。
36.进一步细说,车体1内设置有电源50,电源50用于供电,电源50采用蓄电池。
37.本文中所描述的具体实施例仅仅是对本实用新型精神作举例说明。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本实用新型的精神或者超越所附权利要求书所定义的范围。
38.尽管本文较多地使用了大量术语,但并不排除使用其它术语的可能性。使用这些术语仅仅是为了更方便地描述和解释本实用新型的本质;把它们解释成任何一种附加的限制都是与本实用新型精神相违背的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1