车辆用安全带装置的制作方法
1.本发明涉及车辆用安全带装置。
背景技术:
2.已知有检测行人的技术和控制安全带的技术(例如参照专利文献1-3)。
3.在先技术文献
4.专利文献
5.专利文献1:日本特开2007-72658号公报
6.专利文献2:日本特开2005-200001号公报
7.专利文献3:日本特开平11-348730号公报
技术实现要素:
8.发明要解决的课题
9.在现有技术中,本车辆的驾驶员和该本车辆的周围的安全性有时不够,具有进一步提高该安全性的余地。
10.本发明是考虑到这样的情况而完成的,其目的之一在于提供一种能够进一步提高本车辆的驾驶员和该本车辆的周围的安全性的车辆用安全带装置。
11.用于解决课题的方案
12.本发明的车辆用安全带装置采用了以下的结构。
13.(1)本发明的第一方案一种车辆用安全带装置,其中,所述车辆用安全带装置具备:识别部,其识别车辆的周围的状况;转向操作件,其能够调整所述车辆的转向;振动器,其使所述转向操作件的一部分振动;安全带,其束缚所述车辆的乘员的身体的一部分;张力调整机构,其能够调整所述安全带的张力;以及控制部,其基于由所述识别部识别出的所述状况,来控制所述振动器和所述张力调整机构。
14.(2)本发明的第二方案在第一方案的基础上,所述控制部在由所述识别部识别为从所述乘员观察时在左侧存在所述乘员应当注视的物体的情况下,对所述振动器进行控制,使从所述乘员观察时所述转向操作件的左侧的部位与右侧的部位相比更加强烈地振动,所述控制部在由所述识别部识别为从所述乘员观察时在右侧存在所述乘员应当注视的物体的情况下,对所述振动器进行控制,使从所述乘员观察时所述转向操作件的右侧的部位与左侧的部位相比更加强烈地振动。
15.(3)本发明的第三方案在第一方案或第二方案的基础上,所述控制部在由所述识别部识别为从所述乘员观察时在后方存在所述乘员应当注视的物体的情况下,对所述张力调整机构进行控制,调整所述安全带的张力。
16.(4)本发明的第四方案在第一方案至第三方案中的任一方案的基础上,还具备检测部,该检测部检测所述乘员的视线的朝向或面部的朝向,所述控制部基于由所述识别部识别出的所述状况和由所述检测部检测到的所述朝向,来控制所述振动器和所述张力调整
机构。
17.(5)本发明的第五方案在第四方案的基础上,所述控制部在所述乘员应当注视的物体存在于所述车辆的周围且所述乘员没有将视线或面部朝向所述物体的情况下,对所述振动器进行控制,使存在所述物体的第一侧的所述转向操作件的部位与不存在所述物体的第二侧的所述转向操作件的部位相比更加强烈地振动。
18.(6)本发明的第六方案在第四方案或第五方案的基础上,所述控制部在所述乘员应当注视的物体在从所述乘员观察时存在于后方且所述乘员没有将视线或面部朝向所述物体的情况下,对所述张力调整机构进行控制,与所述乘员应当注视的物体在从所述乘员观察时存在于后方且所述乘员将视线或面部朝向所述物体的情况相比,更加增强所述安全带的张力。
19.(7)本发明的第七方案在第一方案至第六方案中的任一方案的基础上,所述控制部在控制所述振动器使所述转向操作件振动之后,控制所述张力调整机构调整所述安全带的张力。
20.(8)本发明的第八方案在第一方案至第七方案中的任一方案的基础上,还具备输出信息的输出部,所述控制部基于由所述识别部识别出的所述状况,使所述输出部输出信息。
21.(9)本发明的第九方案在第八方案的基础上,所述输出部包括显示部,所述控制部使所述显示部显示拟人化的角色的图像。
22.发明效果
23.根据上述方案,能够进一步提高本车辆的驾驶员和该本车辆的周围的安全性。
附图说明
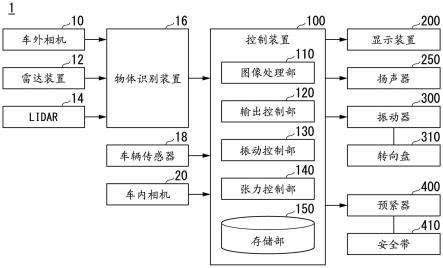
24.图1是表示车辆用安全带装置1的结构的一例的图。
25.图2是示出搭载有显示装置200的本车辆m的车内的一例的图。
26.图3是用于说明显示装置200的双凸透镜构造的图。
27.图4是用于说明显示装置200的功能的图。
28.图5是用于说明车外相机10对物体的检测与显示装置200对图像对象ob
img
的显示之间的关系的图。
29.图6是表示由控制装置100进行的一系列处理的流程的流程图。
30.图7是表示驾驶员将视线或面部朝向全部的风险点pt的一个场景的图。
31.图8是用于说明图7的场景中的各设备的控制方法的图。
32.图9是用于说明图7的场景中的各设备的另一控制方法的图。
33.图10是表示驾驶员没有将视线或面部朝向一部分风险点pt的一个场景的图。
34.图11是用于说明图10的场景中的各设备的控制方法的图。
35.图12是用于说明振动器300的控制时刻的图。
36.图13是用于说明预紧器400的控制时刻的图。
37.图14是表示驾驶员将视线或面部朝向全部的风险点pt的另一场景的图。
38.图15是用于说明图14的场景中的各设备的控制方法的图。
39.图16是表示驾驶员没有将视线或面部朝向一部分风险点pt的另一场景的图。
40.图17是用于说明图16的场景中的各设备的控制方法的图。
41.图18是表示驾驶员没有将视线或面部朝向一部分风险点pt的另一场景的图。
42.图19是用于说明图18的场景中的各设备的控制方法的图。
43.附图标记说明:
44.1:车辆用安全带装置;10:车外相机;12:雷达装置;14:lidar;16:物体识别装置;18:车辆传感器;20:车内相机;100:控制装置;110:图像处理部;120:输出控制部;130:振动控制部;140:张力控制部;150:存储部;200:显示装置;250:扬声器;300:振动器;310:转向盘;400:预紧器;410:安全带。
具体实施方式
45.以下,参照附图对本发明的实施方式进行说明。在本实施方式中,作为一例,对适用左侧通行的法规的情况进行说明,但在适用右侧通行的法规的情况下,只要将左右反过来读即可。
46.图1是表示车辆用安全带装置1的结构的一例的图。车辆用安全带装置1例如具备车外相机10、雷达装置12、lidar(light detection and ranging)14、物体识别装置16、车辆传感器18、车内相机20、控制装置100、显示装置200、扬声器250、振动器300、转向盘310、预紧器400以及安全带410。以下,将搭载有车辆用安全带装置1的车辆称为本车辆m进行说明。将车外相机10、雷达装置12、lidar14以及物体识别装置16中的一部分或全部合起来的结构是“识别部”的一例。
47.车外相机10例如是利用了ccd(charge coupled device)或cmos(complementary metal oxide semiconductor)等固体拍摄元件的数码相机。车外相机10安装于本车辆m的任意部位。车外相机10安装于前挡风玻璃上部、车室内后视镜背面、车身的前头部等。在拍摄后方的情况下,车外相机10可以安装于后挡风玻璃上部、后门等,也可以安装于车门上后视镜等。
48.雷达装置12向本车辆m的周边辐射毫米波等电波,并且,检测被周边的物体反射后的电波(反射波)而至少检测物体的位置(距离和方位)。雷达装置12安装于本车辆m的任意部位。雷达装置12也可以通过fm-cw(frequency modulated continuous wave)方式来检测物体的位置和速度。
49.lidar14向本车辆m的周边照射光,测定散射光。lidar14基于从发光到受光的时间,检测距对象的距离。所照射的光例如是脉冲状的激光。lidar14安装于本车辆m的任意部位。
50.物体识别装置16对车外相机10、雷达装置12及lidar14中的一部分或全部的检测结果进行传感器融合处理,识别本车辆m的周边的物体的位置、种类、速度等。物体例如包含其他车辆(例如,存在于规定距离以内的周边车辆)、行人、自行车、道路构造物等。道路构造物例如包含道路标识、交通信号灯、道口、路缘石、中央隔离带、护栏、围栏等。另外,道路构造物例如也可以包含在路面上描绘或粘贴的道路划分线(以下称为划分线)、人行横道、自行车横穿道、暂时停止线等路面标识。另外,物体可以包含道路上的落下物(例如其他车辆的货物或设置在道路周边的广告牌)等障碍物。物体识别装置16向控制装置100输出识别结果。需要说明的是,物体识别装置16可以将车外相机10、雷达装置12及lidar14的检测结果
直接向控制装置100输出。在该情况下,控制装置100也可以具有物体识别装置16的功能。
51.车辆传感器18包括检测本车辆m的速度的车速传感器、检测加速度的加速度传感器、检测横摆角速度(例如,绕通过本车辆m的重心点的铅垂轴的旋转角速度)的横摆角速度传感器、检测本车辆m的朝向的方位传感器等。车辆传感器18将表示速度、虚拟度横摆角速度、方位角这样的检测结果的信号向控制装置100输出。
52.车内相机20与车外相机10同样,例如是利用了ccd或cmos等固体拍摄元件的数码相机。车内相机20例如设置在本车辆m的仪表板的中央,对车室内进行拍摄。车内相机20尤其是拍摄本车辆m的驾驶员、副驾驶座位的乘员,将其图像向控制装置100输出。
53.控制装置100例如具备图像处理部110、输出控制部120、振动控制部130、张力控制部140以及存储部150。这些构成要素例如通过cpu(central processing unit)等硬件处理器执行程序(软件)来实现。这些构成要素中的一部分或全部也可以通过lsi(large scale integration)、asic(application specific integrated circuit)、fpga(field-programmable gate array)、gpu(graphics processing unit)等硬件(包括电路部:circuitry)来实现,还可以通过软件与硬件的协作来实现。程序可以预先被保存于存储部150,也可以被保存于dvd或cd-rom等可拆装的存储介质(非暂时性的存储介质),通过将该存储介质装配于驱动装置而安装到存储部150。控制装置100是“控制部”的一例。
54.图像处理部110对由车内相机20拍摄到的图像进行分析,检测本车辆m的乘员(尤其是驾驶员)的视线的朝向、面部的朝向。将车内相机20与图像处理部110合起来的结构是“检测部”的一例。
55.输出控制部120使显示装置200立体地显示后述的拟人化图像等,或者从扬声器250输出声音。
56.振动控制部130控制振动器300使转向盘310振动。张力控制部140控制预紧器400调整安全带410的张力。
57.存储部150例如通过hdd、闪存器、eeprom(electrically erasable programmable read only memory)、rom(read only memory)或ram(random access memory)等来实现。存储部150例如保存由处理器读出并执行的程序。
58.显示装置200将由控制装置100输出的信息作为图像显示。显示装置200例如是looking glass等具有双凸透镜构造的三维显示器(全息图显示器)。显示装置200是“输出部”以及“显示部”的一例。
59.图2是示出搭载有显示装置200的本车辆m的车内的一例的图。如图2所示,显示装置200设置在仪表板的与驾驶座位对置的位置。在显示装置200中例如显示拟人化图像200a和速度计200b。拟人化图像可以是表示现实存在的人、动物、植物、机器人、其他实体的图像,也可以是表示虚构人物(角色)的图像。拟人化图像典型地是通过动画拟人化的物体运动的图像。
60.图3是用于说明显示装置200的双凸透镜构造的图。在图3中,在将纵线部v与横线部h这两种图像组合而成的被称为透镜状图像的图像上,配置有排列了无数个微细的半圆柱状的凸透镜的片材(双凸透镜)s。由于用户的双眼存在视差,因此,通过穿过片材s,一只眼睛识别纵线部的图像,另一只眼睛识别横线部的图像。由此,用户能够识别具有立体感的图像。
61.返回到图1的说明。扬声器250将由控制装置100输出的信息作为声音而输出。扬声器250是“输出部”的另一例。
62.振动器300埋设在转向盘310的轮圈或辐条这样的一部分框体的内部,或者安装于框体的表面。典型地是,在从驾驶员观察时在左侧的轮圈和右侧的轮圈双方各设置有一个振动器300。
63.转向盘310是能够调整本车辆m的转向(行进方向)的环状部件。在本车辆m中,代替转向盘310,可以设置不是环状的异形的转向盘,也可以设置操纵杆这样的其他操作件。在该情况下,振动器300可以安装于异形的转向盘或操纵杆等。转向盘310、异形的转向盘、操纵杆等是“转向操作件”的一例。
64.预紧器400具有为了消除安全带410的松弛而拉入(卷绕)安全带410的机构。安全带410是将乘员的身体束缚到座椅的带状的安全装置。例如,预紧器400以通过马达的驱动阶段性地加强安全带410的张力而加强该安全带410的束缚力的方式进行工作。预紧器400是“张力调整机构”的一例。
65.图4是用于对显示装置200的功能进行说明的图。在图4中,显示装置200除了显示拟人化图像200a和速度计200b之外,还连续地显示朝向拟人化图像200a的后方扩散的图像对象ob
img
。图像对象ob
img
例如以光或沙等的形态显示。显示装置200能够在透镜区域内和透镜区域外双方成像,因此,用户能够立体地识别从透镜区域内朝向透镜区域外扩展的图像对象ob
img
。另一方面,显示装置200还具有在透镜区域外形成的像的视觉确认性相比在透镜区域内形成的像的视觉确认性下降这样的特性。
66.需要说明的是,在图4中,显示装置200以连续一组的形状显示图像对象ob
img
,但图像对象ob
img
的显示方法不限于此。例如,显示装置200也可以将图像对象ob
img
显示为间歇分布的多个要素的集合,还可以显示为多个要素沿某个方向流动。
67.接着,说明如下结构:使用车外相机10和显示装置200,向用户报告存在位于本车辆m的周边的物体。图5是用于说明车外相机10对物体的检测与显示装置200对图像对象ob
img
的显示之间的关系的图。此处,专门使用车外相机10,检测存在于本车辆m的前方的物体,计测本车辆m与物体之间的距离、角度。在图5中,cl是本车辆m的车身轴方向,p是行人,dl是本车辆m与行人p的距离,θ是表示相对于车身轴方向cl的行人p的方向的角度。需要说明的是,p不限于行人,也可以是机动车或自行车这样的其他障碍物。
68.物体识别装置16通过进行从车外相机10的拍摄图像空间向从上空观察的平面的位置转换处理,导出距离dl和角度θ的信息(也可以还包含高度的信息)。该处理可以在显示装置200中进行,也可以通过附属于车外相机10的处理器进行。显示装置200从物体识别装置16取得距离dl和角度θ的信息。
69.输出控制部120基于所取得的距离dl和角度θ的信息、以及从显示装置200的拟人化图像200a到车外相机10的高度信息,求出从拟人化图像200a到行人p的空间向量。输出控制部120基于求出的空间向量,来计算从拟人化图像200a的手边朝向行人p的位置显示的图像对象ob
img
的朝向。
70.接着,输出控制部120基于车外相机10的检测结果和计算出的图像对象ob
img
的朝向,来决定从拟人化图像200a的手边朝向行人p的位置显示的图像对象ob
img
的显示方式。具体而言,输出控制部120决定该图像对象ob
img
的密度、颜色的浓度、亮度或者大小等。输出控
制部120基于决定出的显示方式,使显示装置200显示图像对象ob
img
。
71.这样,输出控制部120例如从透镜区域内朝向透镜区域外的障碍物(由物体识别装置16识别出的障碍物)的方向连续地显示一个以上的图像对象ob
img
。在图5的例子中,行人p的位置是由物体识别装置16识别出的障碍物。因此,朝向行人p的位置显示图像对象ob
img
。
72.在图5中,显示装置200从拟人化图像200a的手边朝向行人p的位置显示点状的图像对象ob
img
。如上所述,显示装置200具有在透镜区域外形成的像的视觉确认性相比在透镜区域内形成的像的视觉确认性下降这样的特性,因此,在以同一方式显示出图像对象ob
img
的情况下,在透镜区域内与透镜区域外之间,视觉确认性的下降变得显著,用户可能具有不适感。因此,输出控制部120在显示装置200从透镜区域内朝向透镜区域外显示一个以上的图像对象ob
img
时,使透镜区域附近的图像对象ob
img
相比于远离透镜区域附近的图像对象ob
img
而改变密度、颜色的浓度、亮度及/或大小这样的参数。例如,在图5中,输出控制部120使在接近拟人化图像200a的位置显示的点状的图像对象ob
img
大于远离拟人化图像200a的点状的图像对象ob
img
。此外,输出控制部120使接近拟人化图像200a的点状的图像对象ob
img
的颜色比远离拟人化图像200a的点状的图像对象ob
img
的颜色深。也可以取而代之或者在此基础上,输出控制部120使接近拟人化图像200a的点状的图像对象ob
img
的亮度比远离拟人化图像200a的点状的图像对象ob
img
的亮度高。另外,也可以取而代之或者在此基础上,输出控制部120使接近拟人化图像200a的点状的图像对象ob
img
的密度比远离拟人化图像200a的点状的图像对象ob
img
的密度高。这样,通过将显示方式决定为使得透镜区域附近的图像对象ob
img
相比于远离透镜区域附近的图像对象ob
img
,密度、颜色的浓度、亮度及/或大小不同,从而能够降低图像对象ob
img
的视觉上的不连续性,能够减少用户的不适感。
73.需要说明的是,在本实施方式中,显示装置200从拟人化图像200a的手边显示图像对象ob
img
,但不限于此,也可以将图像对象ob
img
的起始点不设为拟人化图像200a的手边而设为拟人化图像200a的内侧或其附近的位置。
74.[控制装置的处理流程]
[0075]
以下,使用流程图来说明由控制装置100进行的一系列处理。图6是表示由控制装置100进行的一系列处理的流程的流程图。本流程图的处理可以按照规定的周期反复执行。
[0076]
首先,图像处理部110从车内相机20取得车室内的图像(步骤s100),对该取得的图像进行分析,检测本车辆m的乘员(尤其是驾驶员)的视线的朝向、面部的朝向(步骤s102)。
[0077]
接着,输出控制部120判定驾驶员是否将视线或面部朝向了由物体识别装置16识别出的一个或多个障碍物(其他机动车、自行车、行人等)中的、本车辆m的驾驶员应当注视的全部的障碍物(步骤s104)。驾驶员应当注视的障碍物典型地是隐藏在本车辆m的侧方、后侧方、后方这样的本车辆m的死角的障碍物,但不限于此,也可以是驾驶员应注意的前方的障碍物。以下,将本车辆m的驾驶员应当注视的障碍物称为“风险点pt”、将视线或面部朝向该风险点pt的情况称为“关注(eyes on)”并且将除此以外的情况称为“未关注(eyes off)”来进行说明。
[0078]
例如,输出控制部120可以计算表示风险点pt所存在的方向的向量与表示驾驶员的视线的朝向或面部的朝向的向量所成的角度,如果该所成的角度在允许角度内,则判定为关注,如果所成的角度在允许角度外,则判定为未关注。允许角度是看作是两个向量为相同方向的向量的程度的角度,例如可以是几度到几十度的程度的角度。
[0079]
输出控制部120在驾驶员将视线或面部朝向了风险点pt的情况下(在为关注的情况下),使显示装置200以第一方式显示拟人化图像200a和图像对象ob
img
(步骤s106)。此时,输出控制部120也可以从扬声器250以第一方式输出声音。由此,本流程图的处理结束。
[0080]
另一方面,输出控制部120在驾驶员没有将视线或面部朝向风险点pt的情况下(在为未关注的情况下),使显示装置200以第二方式显示拟人化图像200a和图像对象ob
img
(步骤s108)。此时,输出控制部120也可以从扬声器250以第二方式输出声音。
[0081]
接着,振动控制部130对振动器300进行控制,使转向盘310振动(步骤s110)。
[0082]
接着,张力控制部140对预紧器400进行控制来调整安全带410的张力(步骤s112)。由此,本流程图的处理结束。
[0083]
图7是表示驾驶员将视线或面部朝向全部的风险点pt的一个场景的图。在本场景中,适用左侧通行的法规。图中的m1表示在本车辆m的前方的路肩停止的先行车辆。m2表示存在于本车辆m的前方的相向车辆。m3和m4表示在本车辆m的左侧行驶的自行车。
[0084]
在图示的场景中,本车辆m在不存在中央线的道路上行驶,先行车辆m1停止在路肩。因此,先行车辆m1的右侧方的空间变窄,两台车辆无法一边相互错车一边同时通过。此外,相向车辆m2比本车辆m更接近先行车辆m1,因此,按照交通规则或习惯,设想相向车辆m2先通过先行车辆m1的右侧方的空间。即,能够推测为相向车辆m2具有优先权。在该情况下,本车辆m需要在先行车辆m1的后方暂时停止或者慢速行驶。此时,设想自行车m3和m4如图中的轨道tr那样超过停止或慢速行驶的本车辆m(穿过本车辆m的左侧方)而行进到本车辆m的前方。
[0085]
在这样的状况下,期望本车辆m的驾驶员注视该相向车辆m2直到相向车辆m2通过为止,并且进一步注视在使本车辆m起动或加速时容易卷入的自行车m3和m4。因此,输出控制部120将这些相向车辆m2、自行车m3及m4看作是风险点pt,判定驾驶员是否将视线或面部分别朝向了这三个风险点pt。在图示的例子中,驾驶员将视线或面部分别朝向了三个风险点pt(驾驶员关注全部的风险点pt)。在这样的情况下,通过以下说明的控制方法来控制显示装置200、振动器300、预紧器400。尤其是在显示装置200中,以第一方式显示拟人化图像200a和图像对象ob
img
。
[0086]
图8是用于说明图7的场景中的各设备的控制方法的图。例如,在本车辆m遭遇了图7的场景的情况下,虽然驾驶员能够隔着本车辆m的前挡风玻璃f而视觉确认先行车辆m1、相向车辆m2、自行车m3,但是由于自行车m4在从驾驶员观察时位于后方,因此,驾驶员需要回头确认后方,或者利用车室内后视镜或侧视镜来确认后方。
[0087]
例如,假设驾驶员将视线或面部朝向了作为风险点pt的相向车辆m2、自行车m3及m4。在该情况下,作为第一方式,输出控制部120朝向各风险点pt所存在的方向显示图像对象ob
img
。具体而言,输出控制部120将指示相向车辆m2所存在的方向的图像对象ob
img
2、指示自行车m3所存在的方向的图像对象ob
img
3、以及指示自行车m4所存在的方向的图像对象ob
img
4配置于拟人化图像200a的周围进行显示。此时,输出控制部120也可以通过动画而使作为拟人化图像200a显示的角色的一部分(例如手脚、头等)运动。
[0088]
在驾驶员将视线或面部朝向全部的风险点pt的情况下,振动控制部130不控制振动器300,张力控制部140也不控制预紧器400。
[0089]
图9是用于说明图7的场景中的各设备的另一控制方法的图。在图8的例子中,说明
了在驾驶员将视线或面部朝向全部的风险点pt的情况下,在拟人化图像200a的周围显示与各风险点pt一一对应的图像对象ob
img
。也可以取而代之或者在此基础上,如图9所示,作为第一方式,输出控制部120在拟人化图像200a的周围显示“赞”等文字或图画字符、图形等。另外,为了与后述的未关注时的控制方法的差异变得更加显著,输出控制部120也可以在拟人化图像200a的周围不显示图像对象ob
img
或文字这样的内容。
[0090]
图10是表示驾驶员没有将视线或面部朝向一部分风险点pt的一个场景的图。在图10的场景中,驾驶员没有将视线或面部朝向作为风险点pt的相向车辆m2、自行车m3及m4中的自行车m4。在这样的情况下,通过以下说明的控制方法来控制显示装置200、振动器300、预紧器400。尤其是,在显示装置200中以第二方式显示拟人化图像200a和图像对象ob
img
。
[0091]
图11是用于说明图10的场景中的各设备的控制方法的图。在图10的场景中,虽然驾驶员将视线或面部朝向了作为风险点pt的相向车辆m2和自行车m3,但驾驶员没有将视线或面部朝向自行车m4。在这样的情况下,作为第二方式,输出控制部120仅显示与驾驶员的视线或面部没有朝向的风险点pt(成为未关注的风险点pt)对应的图像对象ob
img
。具体而言,输出控制部120仅将指示自行车m4所存在的方向这样的图像对象ob
img
4配置在拟人化图像200a的周围进行显示。
[0092]
振动控制部130在驾驶员没有将视线或面部朝向一部分风险点pt的情况下,对振动器300进行控制,使转向盘310振动。具体而言,在驾驶员的视线或面部没有朝向的风险点pt在从驾驶员观察时存在于本车辆m的左侧的情况下,振动控制部130对振动器300进行控制,使从驾驶员观察时转向盘310的左侧的部位(轮圈、辐条等)与右侧的部位相比更加强烈地振动。反之,在驾驶员的视线或面部没有朝向的风险点pt在从驾驶员观察时存在于本车辆m的右侧的情况下,振动控制部130对振动器300进行控制,使从驾驶员观察时转向盘310的右侧的部位与左侧的部位相比更加强烈地振动。
[0093]
在图示的场景中,自行车m4在从驾驶员观察时存在于本车辆m的左侧的后方,因此,振动控制部130使转向盘310的左侧的部位振动,不使转向盘310的右侧的部位振动。需要说明的是,即便没有使转向盘310的右侧的部位主动地振动,也有时右侧的部位被传递左侧的部位的振动而被动地振动。即便在该情况下,如果考虑振动的衰减,则至少左侧的部位的振动比右侧的部位强。
[0094]
张力控制部140在驾驶员没有将视线或面部朝向一部分风险点pt的情况下,对预紧器400进行控制来调整安全带410的张力。具体而言,在某个风险点pt在从驾驶员观察时存在于本车辆m的后方、并且驾驶员没有将视线或面部朝向该风险点pt的情况下,张力控制部140对预紧器400进行控制,与该风险点pt在从驾驶员观察时存在于本车辆m的后方、并且驾驶员将视线或面部朝向该风险点pt的情况相比,增强安全带410的张力。
[0095]
图12是用于说明振动器300的控制时刻的图,图13是用于说明预紧器400的控制时刻的图。首先,振动控制部130控制振动器300,使转向盘310振动。例如,振动控制部130可以使转向盘310振动两次。在转向盘310振动之后,张力控制部140对预紧器400进行控制,增强安全带410的张力。与上述同样,张力控制部140可以以将安全带410拉拽两次的方式增强张力。需要说明的是,转向盘310的振动次数和安全带410的拉拽次数不限于两次,也可以为一次,还可以为三次或者三次以上。
[0096]
这样,在使转向盘310振动之后,带有时间差地拉拽安全带410,因此,能够更加强
烈地唤起驾驶员注意到在本车辆m的侧方且后方这样的斜方向上存在应当注视的障碍物。需要说明的是,使转向盘310振动的时刻和拉拽安全带410的时刻可以相同,也可以在拉拽安全带410之后使转向盘310振动。
[0097]
图14是表示驾驶员将视线或面部朝向全部的风险点pt的另一场景的图。图中的p5表示穿过人行横道的行人,m6表示在本车辆m的左侧行驶的自行车。在图示的场景中,行人p5和自行车m6均作为风险点pt来处理,驾驶员将视线或面部朝向这些风险点。
[0098]
图15是用于说明图14的场景中的各设备的控制方法的图。与图7的场景同样,在图14的场景中,作为第一方式,输出控制部120也朝向各风险点pt所存在的方向显示图像对象ob
img
。具体而言,输出控制部120将指示行人p5所存在的方向的图像对象ob
img
5和指示自行车m6所存在的方向的图像对象ob
img
6配置在拟人化图像200a的周围进行显示。
[0099]
在驾驶员将视线或面部朝向全部的风险点pt的情况下,振动控制部130不控制振动器300,张力控制部140也不控制预紧器400。
[0100]
图16是表示驾驶员没有将视线或面部朝向一部分风险点pt的另一场景的图。在图16的场景中,驾驶员没有将视线或面部朝向作为风险点pt的行人p5和自行车m6中的自行车m6。
[0101]
图17是用于说明图16的场景中的各设备的控制方法的图。在图16的场景中,虽然驾驶员将视线或面部朝向了作为风险点pt的行人p5,但驾驶员没有将视线或面部朝向自行车m6。在这样的情况下,作为第二方式,输出控制部120仅将指示自行车m6所存在的方向的图像对象ob
img
6配置在拟人化图像200a的周围进行显示。
[0102]
另外,在图16的场景中,振动控制部130对振动器300进行控制,使从驾驶员观察时转向盘310的左侧的部位与右侧的部位相比更加强烈地振动。张力控制部140对预紧器400进行控制,与驾驶员将视线或面部朝向作为风险点pt的自行车m6的情况相比,增强安全带410的张力。
[0103]
图18是表示驾驶员没有将视线或面部朝向一部分风险点pt的另一场景的图。图中的m7表示在本车辆m的前方欲进入本车辆m正在行驶的车道(以下称为本车道)的机动二轮车。在图18的场景中,驾驶员没有将视线或面部朝向作为风险点pt的机动二轮车m7。
[0104]
图19是用于说明图18的场景中的各设备的控制方法的图。在图18的场景中,驾驶员没有将视线或面部朝向作为风险点pt的机动二轮车m7。在这样的情况下,作为第二方式,输出控制部120将指示机动二轮车m7所存在的方向的图像对象ob
img
7配置在拟人化图像200a的周围进行显示。
[0105]
另外,在图18的场景中,机动二轮车m7在从驾驶员观察时位于左侧,因此,振动控制部130可以使转向盘310的左侧的部位振动。张力控制部140可以对预紧器400进行控制,以比风险点pt存在于后方的情况弱的力拉拽安全带410。
[0106]
根据以上说明的实施方式,车辆用安全带装置1具备:物体识别装置16,其识别本车辆m的周围的状况;转向盘310(转向操作件的一例),其能够调整本车辆m的转向;振动器300,其使转向盘310的一部分振动;安全带410,其束缚本车辆m的驾驶员的身体的一部分;预紧器400(张力调整机构的一例),其能够调整安全带410的张力;以及控制装置100,其基于由物体识别装置16识别出的风险点pt、以及相对于该风险点pt的驾驶员的视线或面部的朝向,按照时间差来控制振动器300和预紧器400。由此,能够向本车辆m的驾驶员报告该驾
驶员没有识别出的障碍物的存在。其结果是,能够进一步提高本车辆m的驾驶员和该本车辆m的周围的安全性。
[0107]
此外,根据上述的实施方式,根据驾驶员的视线或面部没有朝向的、驾驶员没有识别出的可能性高的风险点pt(未关注的风险点pt)在从驾驶员观察时存在于左右方向中的哪个方向,来变更使转向盘310振动的部位,因此,能够使驾驶员在感官上识别出应当将注意力转向左右方向中的哪个方向。
[0108]
此外,根据上述的实施方式,在驾驶员的视线或面部没有朝向的、驾驶员没有识别出的可能性高的风险点pt(未关注的风险点pt)在从驾驶员观察时存在于后方的情况下,增强安全带410的张力,因此,能够使驾驶员在感官上识别出应当注意的障碍物存在于后方。
[0109]
此外,根据上述的实施方式,根据风险点pt所存在的位置来变更显示拟人化图像200a和图像对象ob
img
时的方式,因此,能够向驾驶员更加强调地报告该驾驶员没有识别出的障碍物的存在。
[0110]
以上,使用实施方式说明了用于实施本发明的方式,但本发明不受这样的实施方式任何限定,在不脱离本发明的主旨的范围内能够施加各种变形及替换。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1