行驶道路判定控制装置的制作方法
1.本发明涉及自动地判定车辆行驶的行驶道路的类别的控制装置。
背景技术:
2.在专利文献1中,记载有判定车辆行驶的行驶道路是普通路还是沙地路的控制装置。该控制装置根据引擎转速和变速器的齿轮比来求出车轮的角加速度(推测加速度),根据加速度传感器的检测值来求出车轮的实际的角加速度(实际加速度)。接着,根据推测加速度与实际加速度的偏差来判定行驶道路是普通路还是沙地路。该推测加速度因车辆的经年劣化、所使用的燃料的种类等变化而变化。因此,专利文献1所记载的控制装置被构成为首先当在车速为预定车速以上且车轮的角加速度为预定加速度以下来行驶时,求出推测加速度的平均值与实际加速度的平均值的误差率,之后,用误差率校正推测加速度,根据校正后的推测加速度和实际加速度来判定行驶道路是普通路还是沙地路。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2008-213684号公报
技术实现要素:
6.专利文献1所记载的控制装置根据车轮的推测加速度与实际加速度的偏差来判断行驶道路是普通路还是沙地路。然而,行驶道路的类别不限于普通路和沙地路,有泥泞路、岩石路等。关于这样的各种行驶道路,其行驶道路的特征呈现的周期不同且未必产生相同的特征。因此,有可能会无法从具有各种特征的行驶道路,根据车轮的推测加速度与实际加速度的偏差,精度良好地判断当前行驶的行驶道路。
7.本发明是着眼于上述技术的课题而完成的,其目的在于提供能够精度良好地判定行驶道路的类别的行驶道路判定控制装置。
8.为了达到上述目的,本发明是一种行驶道路判定控制装置,根据通过车辆行驶而检测的检测值,判定所述车辆的行驶道路的类别,其特征在于,所述行驶道路判定控制装置具备控制器,该控制器判定所述车辆的行驶道路的类别,所述控制器被构成为根据机器学习完成模型的推测结果来判定所述行驶道路的类别,该机器学习完成模型通过将与所述检测值相应的检测数据作为输入数据输入而推测所述行驶道路的类别。
9.另外,在本发明中,所述机器学习完成模型可以通过将在所述车辆进行测试行驶的时间点检测到的所述检测数据和进行所述测试行驶的行驶道路的类别用作教学数据来进行机器学习而被预先制作。
10.另外,在本发明中,所述控制器可以具备所述机器学习完成模型。
11.另外,在本发明中,所述控制器可以还具备:发送部,将所述检测数据发送到所述车辆的外部装置;以及接收部,接收由存储于所述外部装置的所述机器学习完成模型推测出的所述行驶道路的类别,被构成为根据由所述接收部接收到的所述行驶道路的类别来判
定所述行驶道路的类别。
12.另外,在本发明中,所述检测数据可以包括所述车辆的横向加速度、所述车辆的前后加速度、设置于所述车辆的车轮的旋转速度以及所述车辆的车轮的角加速度中的至少任意一个。
13.另外,在本发明中,所述机器学习完成模型可以被构成为作为用于判定所述行驶道路的类别的输入数据,被输入与所述车辆行驶的时间点下的操作量相应的操作数据。
14.另外,在本发明中,所述操作数据可以加速器操作量和所述车辆的推测前后加速度中的至少任意一方。
15.另外,在本发明中,所述车辆可以具备模式选择装置,该模式选择装置选择驱动力源与驱动轮的变速比大的低模式和所述变速比比所述低模式小的高模式的这至少两个变速模式。
16.另外,在本发明中,所述操作数据可以包括由所述模式选择装置选择的所述变速模式。
17.另外,在本发明中,所述机器学习完成模型可以包括与由所述模式选择装置选择的各个所述变速模式对应的多个机器学习完成模型。
18.另外,在本发明中,所述机器学习完成模型可以被构成为通过作为输入数据而被输入所述车辆行驶的预定期间的所述操作数据以及所述检测数据,从而推测所述行驶道路的类别,所述预定期间被决定为在由所述模式选择装置选择所述低模式的情况下,比由所述模式选择装置选择所述高模式的情况长。
19.而且,在本发明中,所述行驶道路的类别可以包括泥泞路、沙路、普通路、岩石路。
20.根据本发明,将与通过车辆行驶而检测的检测值相应的检测数据作为输入数据而输入到机器学习完成模型,机器学习完成模型根据所输入的该检测数据来推测行驶道路的类别。这样由机器学习完成模型推测行驶道路的类别,根据其推测结果来判定行驶道路的类别,从而能够精度良好地判定行驶道路的特征呈现的周期不同且未必产生相同的特征的各种行驶道路。
附图说明
21.图1是用于说明本发明的实施方式中的车辆的一个例子的示意图。
22.图2是用于说明选择开关的一个例子的示意图。
23.图3是用于说明ecu的结构的框图。
24.图4是示出判定时间与答对率的关系的图。
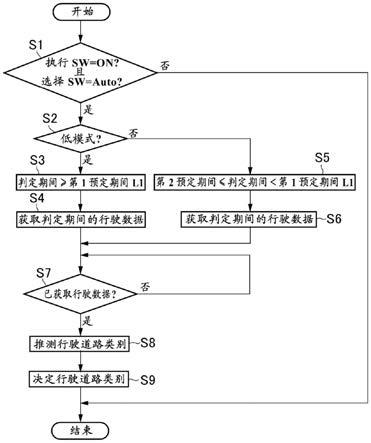
25.图5是用于说明本发明的实施方式中的行驶道路判定控制装置的控制的一个例子的流程图。
26.符号说明
27.1:车辆;2:引擎;3:马达;4:自动变速器;7:副变速器;12:分动器;16:执行开关;17:选择开关;18:电子控制装置(ecu);19:输入部;20:存储部;21:推测部;22:决定部;23:存储/输出部;24:外部装置;25:发送部;26:接收部。
具体实施方式
28.图1示出了本发明的实施方式中的车辆的一个例子。图1所示的车辆1是作为驱动力源而具备引擎2和马达3的混合动力车辆1。此处所示的混合动力车辆1是以前置引擎及后轮驱动车(fr车)为基础的四轮驱动车的例子,在车体的前方侧,引擎(e/g)2向车体的后方配置,接着该引擎2之后依次排列有马达(mg)3和自动变速器(a/t)4。而且,引擎2(更详细而言引擎2的输出轴)和马达3(更详细而言马达3的转子轴)连结于自动变速器4的输入轴5。此外,也可以在引擎2与马达3之间或者马达3与自动变速器4之间,设置有用于降低引擎2的转矩的脉动的弹簧减震器、转矩转换器(液力耦合器)。另外,也可以设置切断引擎2与马达3之间的转矩传递的起动离合器。
29.引擎2是汽油引擎、柴油引擎等内燃机,被构成为根据加速器踏板(未图示)的踩踏量(加速器开度)等请求驱动力来控制节气门开度、燃料喷射量,输出与请求驱动力相应的转矩。另外,引擎2还能够在使燃料的供给停止(燃料切断:f/c)的状态下空转。在该情况下,因泵送损失等所致的动力损耗而产生制动力(引擎制动力)。马达3是永久磁铁式同步电动机等具有发电功能马达(电动发电机:mg)。
30.另外,自动变速器4具备离合器、制动器等多个卡合机构,能够采用能够根据这些卡合机构的卡合状态以及释放状态来设定多个变速档的以往已知的有级式的自动变速器。该自动变速器4被构成为与以往已知的有级式的自动变速器同样地,能够设定与请求驱动力(加速器开度)和车速相应的变速档。此外,自动变速器4也可以是能够通过变更带的缠绕半径而连续地变更变速比的带式无级变速器、能够通过变更动力辊的倾斜角而连续地变更变速比的环式无级变速器等无级变速器。或者,也可以是具备与马达3不同的其它马达、输入轴5以及输出轴6能够差动旋转地连结的差动机构,能够通过控制其它马达的转速而连续地变更输入轴5与输出轴6的转速比的电式无级变速器。
31.对自动变速器4的输出轴6设置有副变速器7,该副变速器7能够切换变速比大的低模式(low mode)和变速比比低模式小的高模式(high mode)。该副变速器7相当于本发明的实施方式中的“模式选择装置”,被构成为能够根据由驾驶员进行的操纵杆的操作等来变更变速模式。因而,例如设想当在坡度角度大的上坡路行驶的情况、在岩石路行驶的情况等需要大的驱动力的情况下,由驾驶员设定低模式。此外,高模式也可以是将自动变速器4的输出轴6与副变速器7的输出轴8的变速比设定为“1”的直接连接档。
32.在图1所示的例子中,后置差动齿轮10经由后置传动轴9连结于上述副变速器7的输出轴8,驱动转矩从后置差动齿轮10传递给作为驱动轮的左右的后轮11。此外,在各个后轮11设置有用于检测车轮速的传感器11a。
33.在副变速器7的输出侧设置有分动器12。分动器12是用于将从副变速器7输出的转矩的一部分传递给前轮13而使四轮驱动状态成立的机构,前置传动轴14连结于该分动器12,该前置传动轴14连结于用于将驱动转矩传递给左右的前轮13的前置差动齿轮15。此外,在各个前轮13设置有用于检测车轮速的传感器13a。
34.分动器12能够采用以往已知的结构的分动器。例如,可以是包括将转矩传递给前置传动轴14的齿轮系和选择性地切断转矩的传递的离合器(分别未图示)的所谓的分时式的分动器、容许后轮11与前轮13的差动并始终将转矩传递给后轮11和前轮13的全时式的分动器以及能够选择性地限制后轮11与前轮13的差动的全时式的分动器等。
35.另外,在各车轮11、13分别设置有以往已知的制动器机构b。因而,在用于抑制车辆1的侧滑的稳定性控制(vsc)、用于抑制车轮11、13的空转的牵引力控制(trc)或者用于抑制车轮11、13的锁定的防抱死制动系统(abs)等工作的情况下,能够单独地控制作用于各车轮11、13的制动转矩。
36.此外,各差动齿轮10、15也可以是具备限制左右轮的差动的机构的限滑差速器(lsd)。通过这样将差动齿轮10、15设为lsd,从而只要限制左右轮的差动,就能够变更传递给左右轮的转矩的分配。
37.另外,该车辆1构成为能够执行根据行驶道路来变更作用于各车轮11、13的驱动转矩、制动转矩的分配的转矩分配控制等与行驶道路相应的控制、变更其控制量。具备:执行开关16,为了变更与该行驶道路相应的控制及其控制量而被操作;以及选择开关17,选择行驶道路的类别。即,驾驶员将执行开关16切换为接通、且利用选择开关17来选择行驶道路的类别,从而设定与其选择的行驶道路相应的控制、控制量。
38.图2示出了选择开关17的一个例子。图2所示的选择开关17构成为使旋钮转动而选择行驶道路的类别。此处所示的选择开关17构成为能够从泥泞路(mud)、沙路(sand)、普通路(general)、岩石路(rock)选择行驶道路。图2所示的选择开关17构成为还能够选择车辆1自动地判定行驶道路的自动模式(auto)。此外,选择开关17例如可以构成为能够通过在安装面板显示上述行驶道路各自的类别和自动模式并对该显示进行触摸操作等来选择行驶道路的类别、自动模式,选择行驶道路的类别、自动模式的手段不限于上述结构。
39.本发明的实施方式中的控制装置构成为在由上述选择开关17选择了自动模式的情况下,自动地判定车辆1当前行驶的行驶道路的类别。
40.在图3中,示出了用于说明用于判定行驶道路的类别的电子控制装置(以下,记载为ecu)18的结构的一个例子的框图。此外,图3是用于说明判定行驶道路的类别的功能的图,例如,也可以具备控制引擎2、马达3、自动变速器4以及分动器12等的功能。
41.该ecu18相当于本发明的实施方式中的“控制器”,也可以将微型计算机作为主体构成,具备存储有预先通过实验、仿真等决定的映射、运算公式等的rom和临时地存储行驶数据等的ram。
42.图3所示的ecu18具备:输入部19,被从设置于车辆1的各种传感器输入数据;存储部20,存储输入到输入部19的数据的一部分;推测部21,具备被从输入部19、存储部20输入数据,根据该所输入的数据来判定行驶道路的机器学习完成模型;决定部22,根据从推测部21输出的数据来决定行驶道路;以及存储/输出部23,将与该决定的行驶道路的类别对应的信号存储于ram、或者输出到其它控制流程。
43.进而,ecu18具备:发送部25,用于将存储部20的数据发送到设置于车辆1的外部的服务器、云等外部装置24;以及接收部26,接收来自外部装置24的数据。
44.输入部19构成为被输入用于判定行驶道路的类别的数据。图3示出了输入到该输入部19的数据的一个例子,是加速器开度(加速器操作量)θ、制动器b的接通断开信号bon/off、引擎转速ne、自动变速器4的变速档(变速比)γ、各车轮11、13的转速(旋转速度)、车辆1的横向加速度(横g)、车辆1的前后加速度(前后g)、副变速器7的变速模式(lo/hi)、执行开关(执行sw)16的输出信号以及选择开关(选择sw)17的输出信号等。被输入到输入部19的数据构成为为了判定行驶道路的类别而预先决定关联性高的参数,输入该关联性高的参数。
此外,上述各数据是搭载于车辆1的传感器的检测值。
45.存储部20由ram构成,构成为能够临时地存储预定期间的数据。因而,输入到输入部19的数据被发送到存储部20,存储该数据。输入部19或者存储部20也可以具备将输入到输入部19的数据或者存储于存储部20的数据进行变换的功能。具体而言,根据加速器开度、自动变速器4的变速档、副变速器7的变速模式求出传递给各车轮11、13的驱动转矩,根据该驱动转矩来求出车辆1的前后加速度的推测值(推测前后加速度g)。然后,将该求出的推测前后加速度存储于存储部20。另外,通过对各车轮11、13的转速(旋转速度)进行微分等来求出各车轮11、13的角加速度,将该求出的角加速度存储于存储部20。此外,存储部20例如既可以从执行开关16切换为接通的时间点起开始存储行驶数据,也可以从车辆1的主开关(未图示)被接通的时间点起开始存储行驶数据。
46.存储于推测部21的机器学习完成模型是以判定行驶道路的类别的方式预先制作出的人工智能(ai),例如,是利用卷积神经网络(cnn)进行机器学习而得的模型。该卷积神经网络与以往已知的例子相同,所以省略详细的说明。
47.关于该机器学习完成模型,测试驾驶员在各种路面状态的行驶道路进行测试行驶,将适于在该行驶道路行驶的行驶模式(行驶道路类别)通过开关操作等输入到制作机器学习模型的装置。该输入的行驶模式被用作进行机器学习时的正确标签。
48.同时,针对每个正确标签而存储与由测试驾驶员行驶时的检测值相应的检测数据(例如,车辆1的横向加速度、车辆1的前后加速度、各车轮11、13的转速以及各车轮11、13的角加速度)和与基于测试驾驶员的驾驶操作量相应的操作数据(例如,加速器开度、制动器b的接通断开信号bon/off以及车辆1的推测前后加速度)。在以下的说明中,将这些检测数据以及操作数据总记为行驶数据。
49.另外,令用于机器学习的行驶数据的期间越长,则越能够提高判定行驶道路的类别的答对率。因此,为了决定能够得到适当的答对率的期间,将所得到的行驶数据例如划分为5秒钟的行驶数据、6秒钟的行驶数据、7秒钟的行驶数据等多个期间的行驶数据,针对各个期间的每个期间而进行机器学习。在该情况下,也可以为了从所得到的行驶数据得到被划分为多个的行驶数据,在时间轴上重叠地划分预定期间的第1行驶数据与第2行驶数据。具体地举出例子进行说明,将从预定时间的第1时间点至从第1时间点起经过预定期间的第2时间点为止的行驶数据作为第1行驶数据而存储,将在从作为第1时间点以后且比第2时间点靠前的时间点的第3时间点至经过预定期间的第4时间点为止的行驶数据作为第2行驶数据而存储。
50.然后,将如上所述划分的行驶数据中的一部分的行驶数据用作训练数据,将其它行驶数据用作测试数据,利用卷积神经网络来进行机器学习。此时,由测试驾驶员输入的行驶模式被用作正确标签。即,通过将行驶数据和行驶模式用作教学数据的有教学的学习,制作所采用的行驶数据的每个期间的机器学习完成模型。
51.图4是示出使用针对所采用的行驶数据的每个期间而制作出的机器学习完成模型来判定出行驶道路的类别的情况下的答对率的图。使用所采用的行驶数据的期间(判定期间)作为图4的横轴,使用答对率作为纵轴。另外,用实线表示普通路的答对率,用虚线表示泥泞路的答对率,用点划线表示沙路的答对率,用双点划线表示岩石路的答对率。
52.如图4所示,关于普通路、泥泞路、沙路的答对率,即使在判定期间短的情况下,也
能够得到作为目标的答对率以上的答对率。相对于此,关于岩石路的答对率,在比第1预定期间l1短的期间,答对率急剧地下降。这被认为是因为岩石路与普通路、泥泞路或者沙路相比,路面的凹凸的图案各种各样,另外行驶数据的特征呈现的周期长的缘故。此外,当在岩石路行驶的情况下,行驶数据的特征呈现的周期变长的主要原因之一被认为在于当在岩石路行驶的情况下,将副变速器7切换为低模式,以低速行驶。
53.因而,制作与由副变速器7选择的变速模式对应的两个机器学习完成模型。即,作为与副变速器7是低模式的情况对应的机器学习完成模型,制作使用图4中的l1以上的期间的行驶数据进行机器学习而得的模型,作为与副变速器7是高模式的情况对应的机器学习完成模型,制作使用图4中的小于l1的期间的行驶数据进行机器学习而得的模型。此外,也可以通过将由副变速器7选择的变速模式用作输入数据,从而制作一个机器学习完成模型。
54.然后,将由存储于推测部21的机器学习完成模型推测出的行驶道路的类别的推测结果输出到决定部22,由决定部22决定行驶道路的类别。然后,由存储/输出部23将由决定部22决定的行驶道路的类别存储于ram、或者输出到使用了行驶道路的类别的控制装置等。
55.此外,本发明的实施方式中的机器学习完成模型不限于存储于ecu18的模型,例如也可以存储于外部装置24,将行驶数据从发送部25发送到外部装置24。在这样的情况下,由外部装置24推测行驶道路的类别,由接收部26接收表示该推测出的行驶道路的类别的信号,然后,由决定部22决定行驶道路的类别即可。
56.接下来,说明用于判定行驶道路的类别的控制例。图5是用于说明该控制例的流程图,首先,判断是否执行开关16接通且选择开关17是否选择了自动模式(步骤s1)。该步骤s1能够根据从执行开关16以及选择开关17输入到输入部19的信号来判断。
57.在由于执行开关16不为接通或者选择开关17未选择自动模式而在步骤s1中做出否定判断的情况下,直接临时结束该例程。即,在执行开关16不为接通的情况下,不执行根据行驶道路来变更转矩的分配等控制,而执行输出与驾驶员的操作量相应的驱动力等通常控制。另外,在由选择开关17选择行驶道路的情况下,执行进行与该选择的行驶道路相应的转矩分配等的控制。
58.与其相反地,在由于执行开关16为接通且由选择开关17选择自动模式而在步骤s1中做出肯定判断的情况下,判断副变速器7的变速模式是否是低模式(步骤s2)。该步骤s2能够根据从副变速器7输入到输入部的信号(lo/hi)来判断。
59.在由于副变速器7的变速模式是低模式而在步骤s2中做出肯定判断的情况下,将为了判定行驶道路而输入到机器学习完成模型的行驶数据的期间(判定期间)设定为图4所示的岩石路的答对率为作为目标的答对率以上的第1预定期间l1以上的期间(步骤s3)。接着,从存储部20获取通过步骤s3设定的期间的行驶数据(步骤s4)。此外,在步骤s3中设定的判定期间设定为与为了制作与副变速器7是低模式的情况对应的机器学习完成模型而采用的行驶数据的期间相同的期间。
60.与其相反地,在由于副变速器7的变速模式是高模式而在步骤s2中做出否定判断的情况下,将为了判定行驶道路而输入到机器学习完成模型的行驶数据的期间(判定期间)设定为第2预定期间l2以上且小于第1预定期间l1的期间(步骤s5)。接着,从存储部20获取通过步骤s5设定的期间的行驶数据(步骤s6)。该第2预定期间l2可以是作为目标的判定期间。此外,在步骤s5中设定的判定期间设定为与为了制作与副变速器7是高模式的情况对应
的机器学习完成模型而采用的行驶数据的期间相同的期间。
61.接着,判断是否已获取在步骤s3、步骤s5中设定的期间的行驶数据(步骤s7)。即,在副变速器7的变速模式是低模式的情况下,判断是否获取到从比当前时间点早在步骤s3中设定的期间的时间点起的行驶数据,在副变速器7的变速模式是高模式的情况下,判断是否获取到从比当前时间点早在步骤s5中设定的期间的时间点起的行驶数据。
62.在由于在紧接着执行开关16被切换为接通之后、紧接着车辆1的主开关被接通之后等未能获取在步骤s3、步骤s5中设定的期间的行驶数据而在步骤s7中做出否定判断的情况下,在获取到该期间的行驶数据之前,重复执行步骤s7。
63.与其相反地,在由于获取到在步骤s3、步骤s5中设定的期间的行驶数据而在步骤s7中做出肯定判断的情况下,将该获取到的行驶数据输入到机器学习完成模型,从而推测行驶道路的类别(步骤s8)。在该步骤s8中,如上所述,在制作出与由副变速器7选择的行驶模式对应的两个机器学习完成模型的情况下,根据由副变速器7选择的行驶模式,确定输入行驶数据的机器学习完成模型,将行驶数据输入到该确定的机器学习完成模型。另外,在通过将由副变速器7选择的变速模式用作输入数据,从而制作出一个机器学习完成模型的情况下,除了行驶数据之外,还将由副变速器7选择的变速模式输入到机器学习完成模型。
64.如上所述将行驶数据输入到机器学习完成模型,从而利用机器学习完成模型推测行驶道路的类别。因而,接着步骤s8之后,由决定部22决定推测出的行驶道路的类别(步骤s9),临时结束该例程。
65.此外,在机器学习完成模型存储于外部装置24的情况下,构成为当在步骤s7中做出肯定判断之后,将该获取到的行驶数据从发送部25发送到外部装置24,与步骤s8同样地由外部装置24推测行驶道路的类别,由接收部26接收该推测出的行驶道路的类别,执行步骤s9即可。
66.如上所述由机器学习完成模型推测以及判定行驶道路的类别,从而能够精度良好地判定行驶道路的特征呈现的周期不同且未必产生相同的特征的各种行驶道路。另外,在这样使用机器学习完成模型来判定行驶道路的类别的情况下,变更在变速模式是低模式的情况和是高模式的情况下采用的行驶数据的期间,从而能够使判定行驶道路的类别的答对率成为目标答对率以上。换言之,通过使在以高模式行驶的情况下采用的行驶数据的期间比在以低模式行驶的情况下采用的行驶数据的期间短,从而能够缩短在以高模式行驶的情况下采用的行驶数据的检测时间,能够缩短判定行驶道路的类别的期间。
67.此外,关于本发明的实施方式中的行驶道路判定控制,基于通过进行测试行驶而检测的检测值的数据被输入到机器学习完成模型即可。因而,例如既可以将车速、上下加速度等作为输入数据而输入到机器学习完成模型,还能够与其相反地,设想根据惰性行驶时等的检测值来判定行驶道路的类别,所以也可以不输入与加速器开度等驾驶员的操作量相应的数据。
68.另外,本发明的实施方式中的行驶道路判定控制装置不限于四轮驱动车,也可以是前轮驱动或者后轮驱动的二轮驱动车。进而,在本发明中能够作为对象的车辆不限于具备上述副变速器的车辆,例如也可以是以往已知的仅具备有级变速器的车辆。在该情况下,在设定有变速比比能够设定的变速档中的预定的变速档大的低速侧的变速档的情况下,将判定期间设定成比设定有变速比比预定的变速档小的高速侧的变速档的情况长即可。即,
也可以使自动变速器作为本发明的实施方式中的“模式选择装置”发挥功能,根据其变速比来设定判定期间。另外进而,在本发明中能够作为对象的车辆不限于上述混合动力车辆,也可以是作为驱动力源而仅具备引擎的引擎车辆、作为驱动力源而具备一个或者多个马达的电动汽车。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1