一种应用于电动方程式赛车的集成式多功能控制系统
1.本发明属于电动车控制系统领域,具体涉及一种应用于电动方程式赛车的集成式多功能控制系统。
背景技术:
2.整车控制系统是车辆控制的核心内容,整车控制系统的性能直接影响了整车的开发周期和稳定性,是电动方程式赛车的核心技术。目前我国的整车控制系统的研发主要面对电动新能源汽车开发,在控制要求和控制模式上跟比赛有较大不同,接口定义各不相同,售后维修等都具有很大问题。现有技术中目前使用的整车控制器,控制模式单一,数据采集匮乏,调试难度大,且有关车载电线的故障频发,车辆稳定性差,维修压力较大。
技术实现要素:
3.本发明的目的在于,提供一种应用于电动方程式赛车的集成式多功能控制系统,在保证了整车控制功能的同时,增加了数据采集、无线通讯、多功能显示以及实现低压电路逻辑等功能,解决了传统控制系统数据采集匮乏和整车线路不稳定的问题。
4.为解决上述技术问题,本发明的技术方案为:一种应用于电动方程式赛车的集成式多功能控制系统,包括整车控制模块、数据采集模块以及配电模块;其中,
5.数据采集模块,用于采集监测车辆的实时状态物理量,实时状态物理量至少包括四轮实时轮速,电池电量及温度,四个悬架弹簧伸缩量,gps定位信息和整车的姿态数据;
6.整车控制模块,用于读取实时状态物理量并做相关运算处理,生成控制指令发送至整车的电机控制器;
7.配电模块,用于向整车控制模块供电;
8.数据采集模块、整车控制模块和配电模块均设置于pcb板上,pcb板采用四层电路板设计,其中中间两层分别设置为电源层和地层,减少了电源的回流面积;对于高速的晶振走线进行等长布线,并尽量靠近芯片引脚;滤波电容尽量靠近芯片引脚,保证对输入芯片的电源进行有效滤波处理。
9.配电模块包括顺次连接的安全回路模块、供电模块和tsal模块;其中,
10.安全回路模块,用于与电器元件连接形成该电器元件保护电路,在出现元器件故障断路时控制该电路断开以及控制bms互锁;
11.供电模块,用于提供电压以及变压,并进行自充电;
12.tsal模块,用于接收高压继电器以及高压电池组两端电压信号,通过或门与非门的运算,使车辆在运行过程时tsal灯亮红灯,在断开高压时tsal灯亮绿灯。
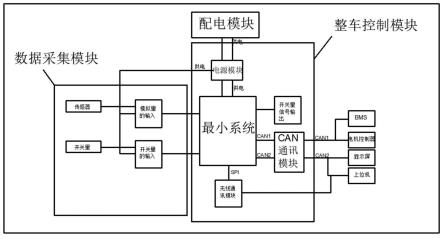
13.整车控制模块包括电源模块、最小系统、can通讯模块以及无线通讯模块;其中,电源模块分别与配电模块、最小系统以及数据采集模块,用于接收来自配电模块的电压并向整车控制模块以及数据采集模块供电;最小系统作为主控制器,用于控制内部计算;can通讯模块与无线通讯模块分别通过can网络以及spi网络与外部信息交互。
14.供电模块选用的芯片型号为mc33063和bq24105-q1。
15.tsal模块选用的芯片型号为tld1120el和ne555。
16.最小系统采用stm32f407zgt6单片机。
17.can通讯模块采用6n137光耦进行隔离。
18.无线通讯模块的型号为rnf24l01。
19.与现有技术相比,本发明的有益效果为:
20.本发明将部分配电模块逻辑的线路融入控制系统的pcb板中,减少了配电箱电线的数量,解决了内部线束杂乱、焊点密集、布局不合理的问题,减少了人工布线和装配的差错,从而提高线路的稳定与安全。
附图说明
21.图1为本发明实施例的电路板功能逻辑图。
22.图2为本发明实施例中配电模块与整车的接线图。
23.图中,1
‑‑‑
安全回路状态指示灯信号;2
‑‑‑
bms故障指示信号;3
‑‑‑
bms复位信号;4
‑‑‑
高压主开关-;5
‑‑‑
高压主开关+;6
‑‑‑
车舱互锁+;7
‑‑‑
车舱互锁-;8
‑‑‑
电池箱互锁+;9
‑‑‑
电池箱互锁-;10
‑‑‑
电机控制器互锁+;11
‑‑‑
电机控制器互锁-;12
‑‑‑
bspd互锁+;13
‑‑‑
bspd互锁-;14
‑‑‑
激活按钮+;15
‑‑‑
激活按钮-;16
‑‑‑
12v+;17
‑‑‑
12v+;18
‑‑‑
12v+;19
‑‑‑
5v+;20
‑‑‑
tsal指示灯(绿)+;21
‑‑‑‑
tsal指示灯(红)+;22
‑‑‑
tsoff指示灯+;23
‑‑‑
tsal指示灯gnd;24
‑‑‑
高压继电器信号km1_sig;25
‑‑‑
高压继电器信号km2_sig;26
‑‑‑
高压继电器信号km3_sig。
具体实施方式
24.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
25.本发明的技术方案为:
26.基于电动方程式赛车的集成式多功能控制系统的设计,包括整车控制模块、数据采集模块以及配电模块。
27.配电模块,该模块主要分为供电模块、tsal模块以及安全回路模块。该模块的接线定义图见图2。
28.供电模块,其包括mc33063型号的芯片和bq24105-q1型号的芯片,作用分别为将12v转化为5v和防止dcdc对低压电池过充。该模块主要作用为提供12v和5v的电压,并且还可通过dcdc进行自充电。
29.tsal模块,其主要作用为接收高压继电器以及高压电池组两端电压的信号,通过或门与非门的运算,使车辆在运行过程中tsal灯亮红灯,当断开高压时亮绿灯。
30.tsal模块,包括tld1120el型号的芯片和ne555芯片,前者为电路信号提供足够的电流,起到驱动电路的作用,后者使tsal灯可以按照特定的频率去亮灭。
31.安全回路模块,其主要功能为将重要电器元件连接在一条电路里并且该电路中接
有某一常开继电器的控制端,该继电器的受控端接在高压电池的一侧,当该电路通电时该继电吸合高压回路接通,当该回路中某一元件故障导致该电路断电,则常开继电器断开,高压回路断开,从而保证安全。
32.安全回路模块,其功能还包括接收来自bms的k5k7-和di1+信号,两者控制该模块中的bms互锁。当k5k7-信号拉低时断开bms互锁,当di1+信号信号拉高时,可以时bms互锁闭合。
33.整车控制模块,包括最小系统stm32f407zgt6、电源模块、can通讯模块和无线通讯模块。
34.整车控制模块,主控制器采用stm32f407zgt6单片机,预留了多处传感器接口,预留了4个adc模拟信号输入通道,两个个串口通讯通接口,一路spi通讯接口,一路iic通讯接口,和一路can通讯通道,4路pwm输出通道,2路dac模拟信号输出通道等,便于接入更多传感器,设计更为复杂的功能。
35.进一步,电源模块包括电源输入保护电路、12v转5v电路、5v转3.3v电路、电源状态指示灯,其中电源输入保护电路采用pmos管来达到防反接效果。12v转5v电路采用立錡rt7272b的12v转5v的dcdc开关电源芯片,其外围电路输入电容选择了电解电容进行输入去耦,输出电容采用了低esr的固态电容,电感采用低dcr的屏蔽电感,进一步提高了电源效率和电路的稳定性。5v转3.3v电路采用低压差的ams1117-3.3v的线性稳压芯片、并且采用线性稳压电源,保证单片机工作的稳定性。电源状态指示灯为led灯,可以指示12v输入、12v电源、5v电源、3.3v电源的状态。
36.进一步,can通讯模块用高速的6n137光耦进行隔离,can模块的电源部分也采用了b0505的开关稳压芯片进行电源的隔离,进一步保证通讯的稳定性。采用tja1050进行单片机的ttl电平和can信号电平转换。最小系统有两个隔离的can通讯接口和外部通讯,can1接口连接电机控制器,与电机控制器进行直接通讯。can2连接到整车的数采can网络,可以从can2上读取bms、数采的相关信息。
37.进一步,整车控制模块也留出了调试接口,可以运用jtag接口在线仿真调试,也可以借助oled显示屏,串口等多种方式进行调试,降低了软件开发难度。
38.进一步,整车控制模块采用了工业级别的rnf24l01无线通讯模块,采用spi通讯模式,功耗小,空中速率可达2m,传输距离可达1100米,性能稳定,满足了比赛使用需求,用单片机中转可连接电脑,通过上位机对车辆进行数据分析。
39.进一步,整车控制模块,在主程序的循环中将实现oled显示参数,串口发送数据,无线模块发送数据等功能。在can外设的中断中读取各个分模块的数据。本程序还将设定5ms中断用于读取制动踏板信号,油门踏板信号,判断挡位信号,按键信号等,并作相关的运算处理,并生成相关指令发送给电机控制器。设定10ms中断用于查询各个数据采集模块数据,蜂鸣器报警,屏幕显示等。5ms完成一次控制周期,10ms完成一次数据采集并显示。
40.的数据采集模块包括模拟量输入模块和开关量输入模块。数据采集对象包括四个线位移传感器、加速踏板开度传感器、制动踏板开度传感器、四轮轮速传感器、陀螺仪、gps北斗定位以及电池电量和温度。
41.进一步,模拟量输入模块,采用运算放大器来实现电压匹配。
42.进一步,开关量输入模块,对与高速的开关量输入采用6n137型高速光耦,对应低
速的的开关量输入采用tlp521普通光耦,这样既保证输入信号的稳定性,又提高电路板的抗干扰能力。
43.配电模块,详见图1和图2。该模块最重要的就是19高压主继电器km1以及20高压主继电器km2,这两个继电器为常开继电器,分别直接连接在动力电池两端,只有当整个回路闭合时由于其控制端导通,其受控端闭合才可以让高压电池对外通电,一但回路中但有任何地方出现故障,其控制端断开,受控端断开,从而断掉整车高压。
44.进一步,配电模块中,bms复位继电器ka1作用为当bms出现故障时通过手动按下bms复位按钮,来使ka1控制端断电,从而受控端闭合。
45.进一步,配电模块中,放电继电器ka3的作用为当车辆低压掉电之后,可以迅速的将高压回路中的高压给消耗掉。
46.进一步,配电模块中,标号14是为了保证制动系统可信度,一但油压传感器和霍尔传感器信号异常,马上断开回路,从而断掉整车高压。
47.基于电动方程式赛车的集成式多功能控制系统的设计,其特征在于:整车控制模块包含行驶功能模拟量输入模块、安全辅助性功能can模块、防止轮胎打滑模拟量输入模块、辅助行驶功能模块、多功能显示模块、通讯功能模块。
48.进一步,行驶功能模拟量输入模块能够读取踏板开度,通过踏板角位移传感器,输出模拟信号,硬件电路滤波后由单片机adc外设读取数据,若车辆无安全隐患,则对电机控制器发送相应的指令,使电机输出相应的转矩,再结合轮速采集系统反馈的信息,对电机转矩进行调配。
49.进一步,安全辅助性功能can模块,在检测到电池温度稍高、电量稍低等其他威胁性较低的情况时,作出警告提示。在检测到电池过热,电量过低等比较严重的情况时,显示警告信息,并禁止车子使用,以保护相关部件安全。
50.进一步,防止轮胎打滑模拟量输入模块,在正常行驶无踏板制动信号的情况下,若检测车辆非驱动轮轮速明显小于驱动轮轮速,则判定后轮轮胎打滑,加速过猛,则相应的减少电机扭矩输出。
51.进一步,辅助行驶功能模块,使用了gps北斗双定位模块,结合专用上位机对车辆的位置进行定位,便于记录车辆行驶轨迹,优化驾驶策略。
52.进一步,多功能显示模块可以在显示屏32外设上实时显示一些关键参数和报警信息,有利于车手对车辆的把控以及设计人员对车辆的改进和设计。
53.进一步,通讯功能模块,通过can协议与bms(电池管理系统)、mcu(电机控制器)进行通讯,从而实现监控电池状态,向电机控制器发送正反转及扭矩指令。
54.基于电动方程式赛车的集成式多功能控制系统的设计,其特征在于:数据采集模块通过传感器获得的反馈信息有:四轮实时轮速,电池电量及温度,四个悬架弹簧伸缩量,gps定位信息,整车的姿态数据,四个悬架处的弹簧伸长量,这些信息通过can网络汇集在一起,通过屏幕反馈给驾驶员,增加操作体验。
55.进一步,数据采集模块还采用了工业级别的rnf24l01无线通讯模块,采用spi通讯模式,功耗小,空中速率可达2m,传输距离可达1100米,性能稳定,满足了比赛使用需求,用单片机中转可连接电脑,通过上位机对车辆进行数据分析。
56.进一步,数据采集模块,本模块将使用大量传感器对车辆的实时状态进行监测,通
过can通讯网络进行数据共享,通过通讯模块发送给上位机进行数据分析。同时也会由屏幕显示模块实时显示显示出来,便于车手操作及设计人员对车辆进行调校。
57.基于电动方程式赛车的集成式多功能控制系统的设计,其特征在于:多功能显示模块,该模块使用的oled屏是晶奥的4.7寸oled屏,该屏的分辨率为256*128,3.3v供电,可以通过spi接口与硬件设备通讯,可以将车辆的实时速度,倾角,电池电量及温度,水压水温,加速及制动踏板开度以及电机扭矩等关键参数实时显示出来,也可以显示一些警报信息,便于车手对车辆的各项数据有整体把握,也便于设计人员对车辆进行改进,缩短设计周期。
58.基于电动方程式赛车的集成式多功能控制系统的设计,分为整车控制模块、数据采集模块以及配电模块。该系统的设计包括配电模块的设计、pcb板、代码、控制策略、传感器、试验台架的搭建和实车测试。
59.配电模块,主要分为安全回路模块、tsal模块和供电模块。
60.安全回路模块,其主要功能为重要元件的互锁以及对bms互锁的控制。
61.bms互锁的控制,其过程分为bms互锁的断开以及复位。当来自bms的k5k7-信号拉低时,该信号会传输给一比较运算放大器与标准电压比较并将最终的信号传输给一锁存器,然后锁存器将信号传送到三极管b极使三极管不导通,而三极管回路中有控制bms互锁的常开继电器控制端,从而使常开继电器受控端断开,从而来使bms互锁断开。
62.复位则是需要按下bms复位按钮,将di1+的电压拉高到12v,该信号会传输给一比较运算放大器与标准电压比较,最终的信号将为通过两个或门到锁存器,锁存器将信号传送到同一个三极管b极来使三极管导通,从而使常开继电器受控端闭合,从而来使bms互锁闭合。
63.tsal模块,其主要作用为接收高压继电器以及高压电池组两端电压的信号,通过或门与非门的运算,使车辆在运行过程中tsal灯亮红灯,当断开高压时亮绿灯。
64.tsal模块,首先将来自三个高压继电器的信号与标准信号1v和0.4v通过比较运算放大器相比较,获得ok1和safe1信号各3个,然后通过对高压电池组两端电压和标准电压2.3v以及高压电池组与hvd两端的电压和标准电压2.3v相比较获得safe2各1个,接着过对高压电池组两端电压和标准电压2.0v以及高压电池组与hvd两端的电压和标准电压2.0v相比较获得ok2各1个,再将safe1与safe2、ok1与ok2通过或门的运算分别得出一个safe和一个ok,最后将这两个信号通过或门和非门的计算得到红灯信号red和绿灯信号green,再通过驱动电路控制tsal灯的亮灭颜色。
65.pcb板,采用了四层电路板设计,中间加了电源层和地层,有效地减少了电源的回流面积。对于高速的晶振走线进行等长布线,并尽量靠近芯片引脚。滤波电容尽量靠近芯片引脚,对输入芯片的电源进行了有效的滤波处理。电源部分进行了敷铜处理,并且电源和地的走线都有效地进行了加粗处理。优化了pcb的器件布局,将模拟器件尽量远离高速的数字量开关器件,减少数字量的对模拟量的信号干扰。将模拟信号和数字信号进行了“地”隔离,最后用了一个0欧电阻进行单点连接。pcb板的边缘进行了开窗铺铜处理,保证接地良好。最后,通过一个40p的汽车防水接插件和外部进行连接。
66.代码,分为整车控制模块代码设计和数据采集模块代码设计。
67.整车控制模块代码设计,分为主程序、can中断、5ms定时器中断和10ms定时器中
断。
68.主程序是指while循环,主要负责屏幕信息显示,oled显示,上位机数据发送。
69.can中断是指stm32的can外设有专用的中断,将该终端设置较高的优先级,用于接收车辆的数据信息。
70.5ms定时器中断是指读取制动和加速踏板信号,对车辆的安全性做出评估,并作出运算处理,得出电机正反转信号及扭矩大小,并将控制指令打包发送给电机控制器。
71.10ms定时器中断是指发送指令读取各个传感器模块信息,整合后在主循环中发送给屏幕,还用于蜂鸣器警报提示,生成不同频率的报警声。
72.数据采集模块代码设计,分为主程序、can外设中断、usart外设中断、外部中断和50ms定时器中断
73.主程序是指while循环,主要负责上位机调试信息发送,线位移,水压等模拟量信号的读取
74.can外设中断用于接收主要控制器发送的相关指令并根据指令判断是否发送数据信息。
75.usart外设中断用于读取gps模块以及九轴加速度计陀螺仪模块的数据,并进行整合。
76.外部中断用来检测轮速信号,记录轮速传感器高电平次数。
77.50ms定时器中断用于统计轮速信号数据,运算得出车轮速度。
78.控制策略,分别为车辆状态监测、行驶控制策略、防止轮胎打滑和数据记录。
79.车辆状态监测是对电池电量、温度以及水箱水量和温度进行监测,判断是否具备行驶条件以及是否有必要对电机扭矩输出进行限制。通过屏幕及蜂鸣器做出相关警告,确保行车安全。
80.行驶控制策略是指本系统将会设计多种方案,使踏板开度和电机扭矩之间有较好的匹配性。设置控制系数,配合车手实际操作手感进行调节。
81.防止轮胎打滑具体为若检测到驱动轮和非驱动轮轮速差距过大,则判定为轮胎打滑,限制电机扭矩输出。
82.数据记录指在电脑端通过上位机接收车辆行驶时的各个参数。对车辆的路径,速度,倾角,电池电量等进行分析,便于车辆的设计改进。
83.传感器设计,分为线位移传感器、加速踏板传感器、制动踏板传感器、轮速传感器、陀螺仪传感器、电池电量温度和定位模块。
84.线位移传感器输出模拟信号,是通过硬件电路分压滤波后由单片机adc外设读取数据。
85.加速踏板传感器输出模拟信号,是通过硬件电路分压滤波后由单片机adc外设读取数据。
86.制动踏板传感器输出模拟信号,是通过硬件电路滤波后由单片机adc外设读取数据。
87.轮速传感器采用齿轮轮速传感器,是输出12v信号,经电压转换电路转换至3.3v后输入至单片机外部中断对应的gpio口。
88.陀螺仪传感器采用九轴陀螺仪加速度计传感器,使用mpu9250芯片。支持iic和串
口输出数据。
89.电池电量温度是由bms(电池管理系统)通过can总线输出信号。
90.定位模块采用atk1218-bd gps北斗双定位模块,使用gnss_viewer上位机软件对车辆进行跟踪。定位精度达2.5cep。该模块采用串口输出数据,由串口读取数据。
91.试验台架的搭建,将模拟汽车驾驶位置,将包括方向盘,加速及制动踏板,尾灯,陀螺仪等模块,对模拟试验台架进行操作,通过can转usb盒子读取相关控制信息,通过上位机以及屏幕显示相关数据,获取一套较为完善的数据资料。
92.实车测试,将会借助wute车队现有的电动方程式赛车进行实车测试,通过车手反馈意见对程序进行改进,得出最好的控制方案。
93.本领域的技术人员容易理解,以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1