一种基于能量预估的增程式电动汽车能量管理控制方法
1.本发明属于新能源电动汽车领域,特别涉及一种增程式电动汽车能量管理控制方法。
背景技术:
2.随着全球环境问题和能源危机的不断加重,“碳中和”、“碳达峰”政策的提出,大力发展新能源电动汽车已经刻不容缓。针对目前纯电动汽车电池寿命短、续驶里程短和充电时间长等一系列问题,增程式电动汽车却可以充分结合两者的优势。因此,大力推广和研究增程式电动汽车已成为当下新能源电动汽车研究领域的热点话题。
3.增程式电动汽车作为一款混合动力车型,其基本构造为一款独特的串联式混合动力电动汽车。其动力系统由增程器(发动机和发电机)、动力电池、驱动电机、主减速器、差速器等组成,而能量管理方法对增程式电动汽车整车的动力性、经济性有着重要的影响。因此,在工程实践中需要通过设定一种合理的能量管理方法,在满足整车动力性的前提下最大程度的改善整车的经济性。
4.增程式电动汽车能量管理方法目前大致可分为基于规则和基于优化控制的方法,由于基于规则的能量管理方法简单,在工程应用中便于实现,因此,大部分研究都是在基于规则的能量管理方法基础上展开。但是现有的基于规则的能量管理方法存在一个问题,即增程器在高速道路下工作在高效的燃油消耗区,但一旦电动汽车进入到车速变化较大的城市道路后,会导致增程器不再工作在发动机的高效燃油消耗区,导致油耗升高且充电效率下降,整车的经济性能下降。如果能够让电动汽车在高速道路结束后进入到城市道路后完全由动力电池提供电能行驶,而增程器不工作,则可以解决以上问题,提高电动汽车的经济性能。因此,本发明提出一种基于能量预估的增程式电动汽车能量管理控制方法,通过对电动汽车在即将进入的城市道路中的所需能量进行提前预估,从而在高速道路下进行提前补充能量,使得电动汽车在进入城市道路后,其动力电池的电量储备可以满足在该城市道路下的能量需求,避免增程器在城市道路下启动,以进一步提高整车的经济性。
技术实现要素:
5.针对目前的增程式电动汽车能量管理策略中没有充分考虑电动汽车行驶道路的问题,本发明提供了一种基于能量预估的增程式电动汽车能量管理方法。在电动汽车出发时首先通过电动汽车导航系统获取出行的道路信息,通过协调增程器控制方法1和方法2,通过控制方法1可以使电动汽车在行驶过程中电量始终保持在电量下限值以上,在电动汽车进入城市道路前,通过控制方法2对动力电池进行提前充电,以保障动力电池的电量可以满足剩余城市道路的需求,使电动汽车在城市道路下完全依靠动力电池提供能量进行行驶,以进一步提高汽车的燃油经济性。
6.其中,以上所提到的增程器控制方法1的工作方式为:增程器中发电机输出的电功率和电动汽车行驶所需求的功率大小相等,没有多余的功率对动力电池进行额外的能量补
充。因此,其在满足电动汽车行驶需求能量的前提下,可以维持电池电量在一定值不变。控制方法2的工作方式为:增程器中的发动机工作在燃油消耗最佳区域的最大功率点,发电机发出的功率在满足当下电动汽车行驶所需求的功率后,还剩余额外的功率对电池进行电能补充。
7.为了实现上述目的,本发明提供了如下技术方案:
8.本发明提供的一种基于能量预估的增程式电动汽车能量管理控制方法,其特征在于,所述方法包括以下步骤:
9.步骤s11:计算出行路线中城市道路的里程数s
市
;
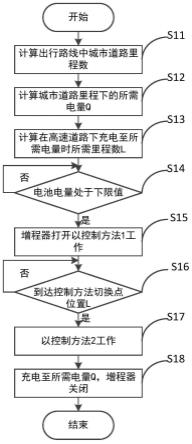
10.步骤s12:计算城市道路里程下所需电量q;
11.步骤s13:计算在高速道路下充电至所需电量q时所需里程数l。
12.步骤s14:为避免动力电池过放电而影响电池寿命,电池通常设有下限值。如果没有行驶到电池电量到达下限值,则重复判断。
13.步骤s15:当电动汽车行驶到电池电量到达下限值时,增程器启动并首先以控制方法1为电动汽车行驶提供能量。
14.步骤s16:判断是否行驶到了距离高速出口距离l处,若没有,则重复判断。
15.步骤s17:当电动汽车行驶到了距离高速出口距离l处,此时需要切换到控制方法2对电池进行预充电。
16.步骤s18:当电池充电至所需预充电量q时,即电动汽车也刚好驶离高速公路而进入城市道路,增程器进入关闭状态,电动汽车以剩余电量q在上述城市道路下进行纯电行驶。
17.本发明技术方案具有以下显著优点:
18.1.本发明通过结合电动汽车的行驶道路状况,将两种控制方法在满足切换条件时进行切换,既避免了增程器开启后一直处于控制方法1时发动机不能工作在最佳燃油区,又避免了增程器一直工作在控制方法2时对电池进行频繁的充电而影响电池的寿命,有效提高了电动汽车的燃油经济性和动力电池的寿命。
19.2.本发明中所设计的基于能量预估的能量管理控制方法,通过提前对城市道路下所需的电量进行预估,使电动汽车在进入车速变化较大的城市道路时以纯电动模式行驶,避免了增程器工作时发出噪声,改善了驾驶员在城市道路下的舒适性。
附图说明
20.图1为本发明预充电过程中路况处于通畅状态下的方案流程图。
21.图2为本发明预充电过程中路况出现拥堵状态下的方案流程图。
具体实施方式
22.为了使本方案的发明目的、技术方案及优点更加清晰明了,以下将结合附图和具体实施例,对本发明进一步详细说明。
23.本发明提供了一种基于能量预估的增程式电动汽车能量管理控制方法。电动汽车在出发后进入到高速道路运行时,当电池电量下降到设定的下限值时,增程器打开,这时增程器以控制方法1进行工作。控制单元通过提前计算出城市道路的所需电量后,在电动汽车
行驶至控制方法切换位置处,增程器切换为控制方法2进行工作,对电池进行城市道路所需电量的预充。并在电动汽车行驶至高速道路结束点时增程器关闭,这时电池电量可以满足剩余城市道路下的所需电能。在剩余的城市道路下,电动汽车的电机完全以电池提供能量进行工作,实现真正的“零排放”、“零污染”。该方法的流程图如图1所示,包括如下步骤:
24.步骤s11:计算出行路线中城市道路的里程数:本方案中规定的城市里程包括通过车载导航系统获知的出行路线中除去高速道路里程后的剩余里程数。当电动汽车出行的路线总里程数为s
总
,高速道路的里程数为s
高
,则剩余城市道路的里程数记为s
市
,其中s
市
=s
总-s
高
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
25.步骤s12:计算城市道路里程下所需电量:通过车载导航系统获得出行路线中城市道路下所包含的不同路段的限速情况,计算出电动汽车在不同限速路段的每公里耗电量。其具体方法为:通过试验提前测出电动汽车在4种不同平均车速下的每公里耗电量,并计算出每kwh的行驶里程数,即每度电的行驶里程数,并将该数据提前储存在车辆储存单元中;通过调取已储存的不同限速路段下每度电的行驶里程ai(km)(i取1、2
…
n),计算出电动汽车即将驶入的城市道路下驶过的所有路段所需的总电量,也即计算出电动汽车进入城市之前动力电池内所需储备的电量,记为q:式中:q为电动汽车进入城市道路时动力电池的电量值,s1、s2…
sn为驶入的城市中,其城市行驶道路下不同限速路段的里程数,a1、a2、...an为步骤s3中所储存的城市工况下,以平均车速分别为30、40、60、80km/h行驶时每度电的行驶里程数。
26.步骤s13:计算在高速道路下充电至所需电量q时所需里程数l:首先,确定增程器切换到控制方法2对电池进行预充电位置的数学表达式:本方案通过提前试验得出平均车速为100km/h下增程器在控制方法2下行驶时,动力电池补充每度电所需的行驶里程数b。并结合所述步骤s3得到的城市道路下的所需电量值q,进而确定出电动汽车在高速道路下增程器在控制方法2对动力电池进行充电至电量达到q时,所需的行驶里程记为l,l=q*b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)式中:l为在控制方法2下,电池补充电量为q时,电动汽车所需行驶的里程,也即电动汽车距离高速公路出口的距离;b为在高速道路及控制方法2下,动力电池补充每度电所需要的行驶里程数。其中,本发明在增程器开启后首先工作在控制方法1而不采用控制方法2的原因是:控制方法1可以避免对电池频繁的进行充放电,影响电池寿命。而在后期需要进行能量预存的时候,采用控制方法2是因为发动机一直工作在高燃效的区域,对电池进行电能补充,充电效率更高,发动机油耗更低。
27.步骤s14:为避免动力电池过放电而影响电池寿命,电池通常设有下限值。如果没有行驶到电池电量到达下限值,则重复判断。
28.步骤s15:当电动汽车行驶到电池电量到达下限值时,增程器启动并首先以控制方法1为电动汽车行驶提供能量。
29.步骤s16:判断是否行驶到了距离高速出口距离l处,若没有,则重复判断。
30.步骤s17:当电动汽车行驶到了距离高速出口距离l处,此时需要切换到控制方法2对电池进行预充电。
31.步骤s18:当电池充电至所需预充电量q时,即电动汽车也刚好驶离高速公路而进入城市道路,增程器进入关闭状态,电动汽车以剩余电量q在上述城市道路下进行纯电行
驶。
32.其中,如果由于其他影响因素导致在高速道路结束时无法使电池充电至所需电量,这样在电动汽车进入城市道路后,当电池电量降低至下限值但行程还未结束时,增程器会再次开启,并且以控制方法1来保证电动汽车行驶至目的地。这时,采用控制方法1是因为电动汽车将很快停车,通过采用控制方法1保持电池电量维持在下限值不变,停车后可以充分利用外接电网进行充电,以合理利用电网能源。
33.本发明还提供了一种基于能量预估的增程式电动汽车能量管理控制方法,当电动汽车在预充电过程中遇到堵车状况时,该方法是这样实现的。流程图如图2所示,包括如下步骤:
34.步骤s21:计算出行路线中城市道路的里程数:本方案中规定的城市里程包括通过车载导航系统获知的出行路线中除去高速道路里程后的剩余里程数。当电动汽车出行的路线总里程数为s
总
,高速道路的里程数为s
高
,则剩余城市道路的里程数记为s
市
,其中s
市
=s
总-s
高
ꢀꢀꢀꢀꢀꢀꢀ
(1)
35.步骤s22:计算城市道路里程下所需电量:通过车载导航系统获得出行路线中城市道路下所包含的不同路段的限速情况,计算出电动汽车在不同限速路段的每公里耗电量。其具体方法为:通过试验提前测出电动汽车在4种不同平均车速下的每公里耗电量,并计算出每kwh的行驶里程数,即每度电的行驶里程数,并将该数据提前储存在车辆储存单元中;通过调取已储存的不同限速路段下每度电的行驶里程ai(km)(i取1、2
…
n),计算出电动汽车即将驶入的城市道路下驶过的所有路段所需的总电量,也即计算出电动汽车进入城市之前动力电池内所需储备的电量,记为q:式中:q为电动汽车进入城市道路时动力电池的电量值,s1、s2…
sn为驶入的城市中,其城市行驶道路下不同限速路段的里程数,a1、a2、...an为步骤s3中所储存的城市工况下,以平均车速分别为30、40、60、80km/h行驶时每度电的行驶里程数。
36.步骤s23:计算在高速道路下充电至所需电量q时所需里程数l:首先,确定增程器切换到控制方法2对电池进行预充电位置的数学表达式:本方案通过提前试验得出平均车速为100km/h下增程器在控制方法2下行驶时,动力电池补充每度电所需的行驶里程数b。并结合所述步骤s3得到的城市道路下的所需电量值q,进而确定出电动汽车在高速道路下增程器在控制方法2对动力电池进行充电至电量达到q时,所需的行驶里程记为l,l=q*b
ꢀꢀꢀꢀꢀꢀ
(3)式中:l为在控制方法2下,电池补充电量为q时,电动汽车所需行驶的里程,也即电动汽车距离高速公路出口的距离;b为在高速道路及控制方法2下,动力电池补充每度电所需要的行驶里程数。其中,本发明在增程器开启后首先工作在控制方法1而不采用控制方法2的原因是:控制方法1可以避免对电池频繁的进行充放电,影响电池寿命。而在后期需要进行能量预存的时候,采用控制方法2是因为发动机一直工作在高燃效的区域,对电池进行电能补充,充电效率更高,发动机油耗更低。
37.步骤s24:为避免动力电池过放电而影响电池寿命,电池通常设有下限值。如果没有行驶到电池电量到达下限值,则重复判断。
38.步骤s25:当电动汽车行驶到电池电量到达下限值时,增程器启动并首先以控制方法1为电动汽车行驶提供能量。
39.步骤s26:判断是否行驶到了距离高速出口距离l处,若没有,则重复判断。
40.步骤s27:当电动汽车行驶到了距离高速出口距离l处,此时需要切换到控制方法2对电池进行预充电。
41.步骤s28:当电动汽车以控制方法2进行预充电时,在遇到拥堵路段而造成预充电过程提前完成,在剩余的高速里程中增程器将不会关闭,而是切换至控制方法1对当前的电池电量维持在当前值,以保证电动汽车预充好的电量不会被在驶出高速公路的出口之前被消耗。
42.步骤s29:判断是否电动汽车进入城市道路,若没有,则电动汽车继续以控制方法1工作。
43.步骤s210:当电动汽车进入城市道路时,即刚好驶出高速公路出口,增程器关闭,电动汽车以纯电模式行驶。
44.其中,如果由于其他影响因素导致在高速道路结束时无法使电池充电至所需电量,这样在电动汽车进入城市道路后,当电池电量降低至下限值但行程还未结束时,增程器会再次开启,并且以控制方法1来保证电动汽车行驶至目的地。这时,采用控制方法1是因为电动汽车将很快停车,通过采用控制方法1保持电池电量维持在下限值不变,停车后可以充分利用外接电网进行充电,以合理利用电网能源。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1