基于车辆状况大数据的车队跟车距离控制方法与流程
1.本发明涉及电数字数据处理领域,具体涉及基于车辆状况大数据的车队跟车距离控制方法。
背景技术:
2.幽灵堵车现象是指那些表面上看似没有任何起因的、莫名其妙的堵塞,比如没有事故,没有停顿车辆,也没有封闭施工的车道,道路却会莫名其妙地突然出现堵塞,很长一段时间过后,车流又会毫无征兆的顺畅起来。
3.为了解决幽灵堵车这一现象,需要保证前后车距保持在一定的安全量中。特别是随着物流、客运等行业的发展,经常出现多辆车辆同时同路段组成车队行驶的场景,如果车辆之间的距离较小,不利于行车安全,且也容易发生幽灵堵车现象,影响行车效率;如果车辆之间的距离较大,容易出现其他车辆插入车队中的情形,不利于车队的整体行进,也影响行车效率。
技术实现要素:
4.为了解决现有车队行驶过程中由于车间距离过大或过小导致的行车效率差的问题,本发明提供了一种基于车辆状况大数据的车队跟车距离控制方法的技术方案,包括以下步骤:获取目标车队中各车辆的速度稳定性能系数和目标测试数据,所述目标测试数据包括刹车难度系数、速度提升难度系数和对应的雷达探测器的准确率,所述速度稳定性能系数根据对应车辆最近一次处于定速巡航模式中的各采集时刻的速度计算得到,所述雷达探测器用于获取距离前方车辆的距离;根据目标车队中各车辆的车辆状况向量和目标车队中各车辆的序列号判断目标车队中各非队首车辆与对应的前方车辆之间的车辆状况差异度,所述车辆状况向量由对应车辆的刹车难度系数、速度提升难度系数和速度稳定性能系数构成;对于目标车队中任一非队首车辆:根据该非队首车辆与对应的前方车辆之间的车辆状况差异度、该非队首车辆的序列号、该非队首车辆对应的雷达探测器的准确率和该非队首车辆的速度稳定性能系数计算该非队首车辆的目标安全距离调节系数,利用该非队首车辆对应的目标安全距离调节系数对该非队首车辆对应的标准安全距离进行调整,得到该非队首车辆对应的目标安全距离,所述标准安全距离是根据该非队首车辆的各采集时刻的速度得到的;将目标车队中各非队首车辆对应的目标安全距离分发至对应的非队首车辆,以使各非队首车辆按照对应的目标安全距离进行跟车距离控制。
5.进一步地,利用如下公式计算目标车队中各非队首车辆与对应的前方车辆之间的车辆状况差异度:
其中,为车辆b与前方车辆a之间的车辆状况差异度,similarity为余弦相似度函数,tanh为双曲正切函数,为车辆a的刹车难度系数,为车辆a的速度提升难度系数,为车辆a的速度稳定性能系数,为车辆b的刹车难度系数,为车辆b的速度提升难度系数,为车辆b的速度稳定性能系数。
6.进一步地,所述对于目标车队中任一非队首车辆:根据该非队首车辆与对应的前方车辆之间的车辆状况差异度、该非队首车辆的序列号、该非队首车辆对应的雷达探测器的准确率和该非队首车辆的速度稳定性能系数计算该非队首车辆对应的目标安全距离调节系数,包括:利用如下公式计算非队首车辆对应的目标安全距离调节系数:其中,为非队首车辆b与对应的前方车辆a之间的目标安全距离调节系数,、、和均为设定系数;为该非队首车辆b在队列中的序列号,n为车队包含的车辆的数量,为非队首车辆b对应的雷达探测器的准确率,为车辆b与前方车辆a之间的车辆状况差异度,为车辆a的速度稳定性能系数,为车辆b的速度稳定性能系数。
7.进一步地,为1.3,为1.1,为4,为0.4。
8.进一步地,所述利用该非队首车辆对应的目标安全距离调节系数对该非队首车辆对应的标准安全距离进行调整,得到该非队首车辆对应的目标安全距离,包括:利用如下公式计算非队首车辆对应的目标安全距离:其中,为非队首车辆b对应的目标安全距离,为非队首车辆b对应的标准安全距离。
9.进一步地,所述速度稳定性能系数为车辆最近一次处于定速巡航模式中的最近的设定时间内的各采集时刻的速度的标准差。
10.进一步地,所述刹车难度系数为车辆的百公里制动时间。
11.进一步地,所述速度提升难度系数为车辆的百公里加速时间。
12.有益效果:本发明利用车辆对应的刹车难度系数、速度提升难度系数和速度稳定性能系数来衡量车辆状况,基于车队中相邻车辆之间车辆状况的差异,并结合车辆对应的雷达探测器的准确率、车辆的序列号和速度稳定性能系数来计算相邻车辆之间的目标安全距离,使车辆按照对应的目标安全距离进行跟车距离控制;本发明根据车队中各车辆相关的多个参数得到了车队中车辆的目标安全距离,使得车辆之间的距离不至于过大或过小,
解决了现有车队行驶过程中由于车间距离过大或过小导致的行车效率差的问题。本发明的方法是一种特别适用于特定功能,具体是车队行驶相关数据处理的数字数据处理方法,其中利用了计算机进行辅助设计和处理;该方法可以适用于大数据资源服务、数据库和云数据库服务等互联网数据服务,可以配置为车队跟车距离相关的云计算软件、云端融合应用运行支撑平台软件。
附图说明
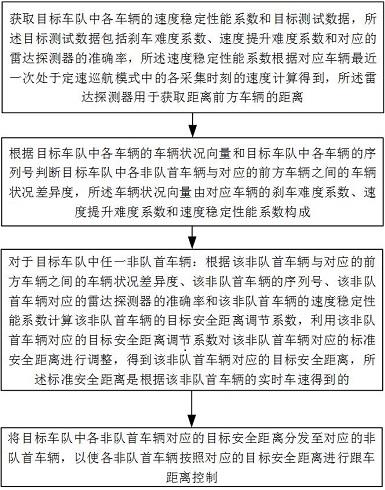
13.图1是本发明的基于车辆状况大数据的车队跟车距离控制方法的流程图。
具体实施方式
14.为使本发明实施例的目的、技术方案和优点更清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行介绍。
15.为了解决现有车队行驶过程中由于车间距离过大或过小导致的行车效率差的问题,本实施例的基于车辆状况大数据的车队跟车距离控制方法包括以下步骤:(1)获取目标车队中各车辆的速度稳定性能系数和目标测试数据,所述目标测试数据包括刹车难度系数、速度提升难度系数和对应的雷达探测器的准确率,所述速度稳定性能系数根据对应车辆最近一次处于定速巡航模式中的各采集时刻的速度计算得到,所述雷达探测器用于获取距离前方车辆的距离;本实施例中车队中各车辆具有辅助驾驶功能。车队中不同车辆的车辆状况不同,在相同道路上刹车难易情况、速度提升快慢情况以及速度稳定能力等方面上存在差异;前方车辆的车辆状况不同,后续车辆在跟车时需要进行不同程度的距离把控。鉴于此,本实施例通过刹车难度系数、速度提升难度系数和速度稳定性能系数来反映车辆状况。接下来分别对参数的获取过程进行说明:刹车难度系数:测试车队中各车辆的百公里制动时间,即从车辆时速一百公里全力刹车到车辆停止所需要的时间,所需时间越短,车辆的制动时间越短,车辆的刹车性能越好,车辆对应的刹车难度越小。本实施例将各车辆的百公里制动时间记为各车辆对应的刹车难度系数,并将各车辆对应的刹车难度系数通过互联网上传到用于车队管理的云端服务器。
16.速度提升难度系数:测试车队中各车辆的百公里加速时间,即车辆速度由0km/h上升到100km/h所需要的时间,本实施例通过各车辆的百公里加速时间来衡量车辆极限加速能力的指标,百公里加速时间直接体现了车辆的动力特性,百公里加速时间约短,车辆的性能越好。本实施例将各车辆的百公里加速时间记为各车辆对应的速度提升难度系数,并将各车辆对应的速度提升难度系数通过互联网上传到用于车队管理的云端服务器。
17.速度稳定性能系数:随着车辆行驶时长的增加,定速巡航模式下车辆对车速的控制能力会改变,车辆的实时速度会出现一定的波动,并不是理想中的一直维持一个速度不变。为了衡量车辆最新的处于定速巡航模式下的速度稳定性能好坏,本实施例当车辆进入定速巡航模式后,按照预设采集频率采集车辆的速度,采集频率为1hz,即一秒采集一次车辆的速度。获取车辆最新设定时间内的各采集时刻对应的速度,本实施例中设定时间为1分钟,由此可以得到60个速度,根据这60个速度计算这60个速度对应的标准差,将标准差记为
车辆的速度稳定性能系数,并将各车辆对应的速度稳定性能系数通过互联网上传到用于车队管理的云端服务器,其中速度稳定性能系数越小,说明车辆的速度稳定性能越好。计算标准差的过程为现有技术,此处不再赘述,作为其它实施方式,上述采集频率和设定时间可以根据需要进行调整。
18.上述三个参数可以反映车辆状况。另外,为了准确把控车辆距离与前方车辆的距离,本实施例还对各车辆安装在车辆前方的雷达探测器的准确率进行了测试,并将测试得到的各车辆对应的雷达探测器的准确率通过互联网上传到用于车队管理的云端服务器。具体测试过程如下:对于任一车辆:在固定位置放置障碍物,通过车辆前方的雷达探测器确定障碍物的距离,比较该距离与标准距离之间的差异大小,差异大则说明该车辆的雷达探测器的准确率低,差异小则说明该车辆的雷达探测器的准确率高,上述标准距离是利用精准雷达探测器测得的障碍物距离。本实施例利用如下公式计算车辆的雷达探测器的准确率:其中,为某车辆的雷达探测器的准确率,为该车辆的雷达探测器测量的障碍物的距离,为标准距离。
19.(2)根据目标车队中各车辆的车辆状况向量和目标车队中各车辆的序列号判断目标车队中各非队首车辆与对应的前方车辆之间的车辆状况差异度,所述车辆状况向量由对应车辆的刹车难度系数、速度提升难度系数和速度稳定性能系数构成;本实施例获取的刹车难度系数、速度提升难度系数和速度稳定性能系数这三个参数可以反映车辆状况,因此本技术基于各车辆对应的这三个参数构建了各车辆对应的车辆状况向量。
20.车队中每辆车都有其对应的序列号,车队中的第一辆车的序列号为1,车队中的第二辆车的序列号为2,
…
,车队中第i辆车的序列号为i,
…
,以此类推。对于车队中的任一非队首车辆,即对于任一序列号不是1的车辆:计算该车辆与前方车辆之间的车辆状况差异度,计算过程如下:其中,similarity为余弦相似度函数,用于比较车辆a的车辆状况向量与车辆b的车辆状况向量之间的余弦相似度。tanh为双曲正切函数,此处用于归一化整理。为车辆a的刹车难度系数,为车辆a的速度提升难度系数,为车辆a的速度稳定性能系数,为车辆b的刹车难度系数,为车辆b的速度提升难度系数,为车辆b的速度稳定性能系数。为车辆b与前方车辆a之间的车辆状况差异度,差异值越大,说明车辆b与前方车辆a之间的车辆状况差异越大。
21.(3)对于目标车队中任一非队首车辆:根据该非队首车辆与对应的前方车辆之间的车辆状况差异度、该非队首车辆的序列号、该非队首车辆对应的雷达探测器的准确率和
该非队首车辆的速度稳定性能系数计算该非队首车辆的目标安全距离调节系数,利用该非队首车辆对应的目标安全距离调节系数对该非队首车辆对应的标准安全距离进行调整,得到该非队首车辆对应的目标安全距离,所述标准安全距离是根据该非队首车辆的实时车速得到的;对于目标车队中任一非队首车辆:该车辆与前方车辆之间的速度稳定性能系数差异越大,说明定速巡航模式下该车辆与前方车辆之间的相对稳定性越差,要么是前方车辆的速度飘忽不定、要么是该车辆的速度飘忽不定,此种情况应增大该车辆与前方车辆之间的距离,以保证行车安全和避免出现幽灵堵车现象;该车辆与前方车辆之间的车辆状况差异越小,制动/加速/定速状态下该车辆越容易实现与前车相似的制动/加速/稳定效果,越容易实现对前方车辆的较好跟随,越有利于保持安全、合适的跟车距离;该车辆在车队中的位置越靠后,即该车辆对应的序列号越大,当队首车辆出现紧急制动情况时留给其进行制动的时间越短,为了保证其行车安全,应适当增大其与前方车辆的距离;雷达探测器的准确率越高,说明测量得到的距离前方车辆的距离越准确,数据置信度性越高。鉴于此,本实施例基于步骤(2)得到的各非队首车辆与对应的前方车辆之间的车辆状况差异度、各非队首车辆在队列中的序列号、速度稳定性能系数差异和雷达探测器的准确率,计算了各非队首车辆与对应的前方车辆之间的目标安全距离调节系数,计算公式如下:其中,为非队首车辆b与对应的前方车辆a之间的目标安全距离调节系数,越大,说明非队首车辆b与前方车辆a的目标安全距离应越大;和均为大于1小于1.5的系数,为大于等于1的系数,为大于0小于1的系数,本实施例中为1.3,为1.1,为4,为0.4,、、和的大小分别序列号、车辆状况差异度、雷达探测器的准确率和速度稳定性能系数对目标安全距离调节系数的影响大小,作为其它实施方式,可以根据实际需要对系数进行调整;为该非队首车辆b在队列中的序列号,n为车队包含的车辆的数量,为非队首车辆b对应的雷达探测器的准确率。越小,说明非队首车辆b对应的雷达探测器的准确率越低,获取的距离前方车辆a的距离越存在误差,为了弥补该误差,越应适当增大距离前方车辆a的距离,以减小前方车辆a急刹车对车辆b的影响。
22.基于各非队首车辆与对应的前方车辆之间的目标安全距离调节系数可以对各非队首车辆对应的标准安全距离进行调节,将调节后的距离记为各非队首车辆对应的目标安全距离。标准安全距离是现有技术中根据相关法律法规得到的预设安全行车距离,该预设安全行车距离与车辆行驶速度有关,为公知技术,比如每小时100公里时保持至少100米,每小时50公里时保持至少50米。本实施例基于如下公式计算各非队首车辆对应的目标安全距离:其中,为非队首车辆b对应的目标安全距离,为非队首车辆b对应的
标准安全距离。
23.(4)将目标车队中各非队首车辆对应的目标安全距离分发至对应的非队首车辆,以使各非队首车辆按照对应的目标安全距离进行跟车距离控制。
24.本实施例步骤(2)和步骤(3)的相关计算内容是在云端服务器中进行的,也就是说通过步骤(3)计算得到的各非队首车辆的目标安全距离记录在云端服务器中的,因此本实施例还将各非队首车辆对应的目标安全距离分发至对应的非队首车辆,以使各非队首车辆按照其对应的目标安全距离进行跟车距离控制。本实施例中目标车队中各车辆具有辅助驾驶功能,各车辆以最新接收到的目标安全距离为目标进行跟车距离控制。本实施例的重点在于为各车辆分发一个较为安全且行车效率较高的目标安全距离,至于各车辆如何控制车辆按照目标安全距离进行跟车控制为现有技术,此处不再赘述。本实施例在步骤(1)获取了目标车队中各车辆的速度稳定性能系数和目标测试数据后在步骤(2)计算了目标车队中各非队首车辆与对应的前方车辆之间的车辆状况差异度,并在步骤(3)基于各非队首车辆与对应的前方车辆之间的车辆状况差异度计算了目标车队中各非队首车辆对应的目标安全距离,在步骤(4)中实现了对目标车队中各非队首车辆对应的目标安全距离的分发。本实施例不涉及对车队中车辆的顺序进行调整的内容,作为其它实施方式,本实施例在步骤(1)和步骤(2)之间还包括对目标车队中各车辆进行排序的内容,具体为:根据目标车队中各车辆对应的车辆状况向量计算目标车队中任意两车辆之间的车辆状况差异度,然后利用k-m配对方法确定最佳车辆顺序,使最佳车辆顺序对应的车队中相邻两车辆之间的车辆状况差异度之和最小,且车队中的队首车辆是车辆状况最优的车辆。每辆车的车辆状况的好坏可以通过公式计算得到,e越大,说明车辆状况越好;目标车队中e最大的车辆即车辆状况最优的车辆。上述计算过程和确定最佳车辆顺序的过程是在云端服务器中进行的,云端服务器在得到了上述最佳车辆顺序之后,将各车辆在最佳车辆顺序中对应的序列号分发给对应车辆,各车辆中的驾驶员在得到了其对应车辆的序列号后即可按照该序列号调整其对应车辆在车队中的顺序;车队按照该最佳车辆顺序进行行进可以保证车队中相邻车辆之间的车辆状况最为相似,避免出现相邻车辆之间由于车辆状况差异过大而需要保证较大安全距离的情况,有利于车队的整体行进。计算目标车队中任意两车辆之间的车辆状况差异度的方法为与步骤(2)中计算两车辆之间的车辆状况差异度的方法相同,此处不再赘述。
25.本实施例利用车辆对应的刹车难度系数、速度提升难度系数和速度稳定性能系数来衡量车辆状况,基于车队中相邻车辆之间车辆状况的差异,并结合车辆对应的雷达探测器的准确率、车辆的序列号和速度稳定性能系数来计算相邻车辆之间的目标安全距离,使车辆按照对应的目标安全距离进行跟车距离控制;本实施例根据车队中各车辆相关的多个参数得到了车队中车辆的目标安全距离,使得车辆之间的距离不至于过大或过小,解决了现有车队行驶过程中由于车间距离过大或过小导致的行车效率差的问题。
26.发明的优选实施例,但本领域内的技术人员一旦得知了基本创造概念,则可对这些实施例作出另外的变更和修改,这些变更和修改均落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1