用于将商用车送往到目标位置中的控制方法和控制设备以及相关商用车与流程
1.本发明涉及一种用于将受驱动的商用车半自动化地遥控支持地送往包括目标地点和目标定向的目标位置的控制方法和控制设备以及为此设立的商用车。
背景技术:
2.根据de 10 2016 011 324 a1已知一种当其驶近和钩挂至挂车时控制牵引车的方法。牵引车后面的后方周围区域例如利用摄像头检测;根据检测到的数据分析牵引车和挂车之间的错开距离和错开角度;计算至少一个行驶轨迹,牵引车借助其可自主行驶至钩挂位置,牵引车根据行驶轨迹自主驶近和钩挂。关于在不受控环境中采用方法或关于测量处理尤其是不期望地意外出现的障碍物在该文献中公开任何内容。
3.根据de 10 2014 013 219 a1已知一种用于调度挂车的辅助系统。给位于牵引车内的操作人员提供轨迹不同的更多行驶机动性。选择行驶机动性之后,辅助系统使得挂车沿相关轨迹运动。操作人员可以通过相应输入辅助系统中断该运动。至少横向引导(也就是挂车转向)在此由辅助系统自动执行。纵向引导例如通过牵引车的控制动力传动和制动系统可以或者由操作人员或由辅助系统执行。
4.根据de 101 01 342 a1已知在应用遥控执行无驾驶员的调度机动性情况下的一种商用车调度设备。调度设备可以实现由位于车辆之外的人员将车辆的牵引机调度进入驻车位置。所说明的改进方式涉及一种自示教功能,其中,保存一次执行的调度过程并且可以被调度设备自动重复。在后一种情况下,遥控装置发送器具有停止功能,其可激发车辆驾驶员提前结束自动控制。de 101 01 342 a1的调度机动性或者完全由人员遥控,或者完全由具有自示教功能的调度设备自动执行。
技术实现要素:
5.本发明任务是提供用于将牵引车送往到目标位置中的控制方法和控制设备,其中,以较小的设备成本和简单操作实现在不受控环境中的更可靠运行。
6.该任务由根据权利要求1的方法、根据权利要求8的装置和根据权利要求10的商用车解决。
7.受控环境在此理解为如下的环境,即,其中会出现没有事先未预料到的人员或对象,并且其中不会出现意外运动以及天气事件和材料特性的变化。这通常要求操作,例如访问控制、人工照明、防雨和天气保护。至少不提供所有这些条件的环境相应称为不受控环境。
8.位置,例如相对位置或目标位置,在此理解为相应包含地点说明和定向说明。地点说明例如可以通过二维或三维坐标系中的坐标完全地或相对地进行。定向说明可以通过二维或三维角度说明连同关于参考点和参考角度的说明一起进行。
9.在此,横向控制表示作用于商用车的转向轴。在具有多个转向轴的车辆中,这也可
以包括对其他作为主转向轴的轴的适当的作用。
10.纵向控制表示作用于商用车的驱动系统和制动系统。
11.目标位置可以是钩挂位置,即,在地点和定向意义下的位置,在该位置处商用车可以钩挂至挂斗或鞍式挂车。在此,目标位置的感测可以有利地通过传感器和挂斗或鞍式挂车上的至少两个可以不同的方式探测的参照标记进行。
12.目标位置也可以是装载位置,即,在装卸平台上可以实现商用车装载或卸载的位置。这种位置也可以有利地通过在装卸平台上或其附近的、预先已知定位的能以不同方式探测的参照标记来感测。
13.目标位置也可以是加载能源的位置,即,可以通过接口向商用车供给工作介质,例如燃料、电池充电或液压液的位置。
14.这种位置也可以有利地通过在供给装置上或其附近的、预先已知定位的能以不同方式探测的参照标记来感测。
15.商用车送往到目标位置中的进展例如可以在预测的整个行驶距离方面通过自送往开始起已经经过的行驶距离来说明。备选地,进展例如可以在预测的整个行驶持续时间方面通过自送往开始起已经度过的行驶持续时间来说明。
16.商用车的传感器例如可以是激光扫描器,或照相机,或摄像机。如果在目标位置处施加至少两个预先已知定位的能以不同方式探测的参照标记,则利用仅一个传感器可以实现定向和间距的确定。
17.用于将商用车送往到目标位置中的控制方法根据本发明包括,感测商用车相对于目标位置的相对位置。一旦以如下方式根据相对位置推导商用车的自动化的、基于调节的横向控制,即,横向控制连同纵向控制一起将商用车送往到目标位置中。在此,根据本发明附加地利用商用车的遥控接收设备检查由位于商用车之外的操作人员利用遥控发送器生成的激活信号的存在。
18.仅在首次存在激活信号时才引入根据横向控制和纵向控制进行的对商用车的送往,在激活信号消失时,中断送往并且例如通过合适的制动措施使得商用车停住。
19.商用车必须为此具有传感器,目标位置必须是可感测的,例如通过可感测的参照标记。
20.在控制方法的一个有利扩展方案中,利用遥控接收设备附加地接收由操作人员输入的与时间相关的纵向控制信号,根据横向控制和所接收的纵向控制信号进行送往。通过这种混合运行(其中,横向控制自动化进行,纵向控制通过遥控进行),下车的操作人员在适当定位情况下可以在输入纵向控制信号时考虑送往过程环境中的所有情况。因而避免了高成本的用于监控不受控环境的安全风险的附加传感器。
21.在另一有利扩展方案中,控制方法如下构成,即,限制在纵向控制的过程中允许的最大速度。该限制有利地可以取决于当前的相对位置、送往的步进和/或横向控制的目前的或即将出现的状态地进行选择。尤其是在较大转向角度意义下的明显转向过程中,按照有利方式进一步降低最大速度。由此横向控制=转向由控制方法确定,也可以实现预先降低最大速度。这在控制大型重型装载商用车情况下尤其是有利的。
22.在控制方法的另一有利扩展方案中,利用遥控接收设备附加地接收由操作人员生成的水平调节信号,在送往期间,根据所接收的水平调节信号引导商用车中存在的水平调
节设备。有利之处例如在于,目标位置是钩挂位置,因为用于卡入的这种联接始终需要牵引车相对于挂斗/鞍式挂车的精确的高度调节。可由操作人员预定的水平调节信号有利之处在于,目标位置是装载位置,以便实现从装卸平台无阶梯地过渡进入商用车内部。
23.在控制方法的另一有利扩展方案中,在首次感测相对位置作为初始位置时校验,究竟是否能够从该初始位置送往至目标位置。在否定情况下,送往无法导入并且尤其是向操作人员告知此情况。
24.在控制方法的另一有利扩展方案中,送往期间校验,究竟是否能够按照预定且无误地结束剩下的送往。在否定情况下,送往被中断并且尤其是向操作人员告知此情况。
附图说明
25.本发明有利实施方案由权利要求以及由结合附图进一步阐述的实施例得到。附图示出:
26.图1以示意性侧视图示出一种应用情况,其中,目标位置是钩挂位置;
27.图2以示意性俯视图示出该应用情况,其中,目标位置是钩挂位置;
28.图3以示意性侧视图示出一种应用情况,其中,目标位置是装载位置;
29.图4以示意性俯视图示出该应用情况,其中,目标位置是装载位置;
30.图5以示意性侧视图示出一种应用情况,其中,目标位置是加载能源的位置;
31.图6以示意性俯视图示出该应用情况,其中,目标位置是加载能源的位置;
32.图7以俯视图说明送往的进展的概念;
33.图8是说明根据本发明方法的框图;
34.图9是说明根据本发明方法的有利扩展的框图;
35.图10是说明根据本发明方法的另一有利扩展的框图;
36.图11是说明根据本发明控制设备1100的框图;
37.图12以示意性俯视图示出一种应用情况,操作人员已下车;
38.图13是纵向控制信号和横向控制关于共同时间轴的示例曲线。
具体实施方案
39.图1以示意性侧视图示出一种应用情况,其中,目标位置103是钩挂位置。图2以示意性俯视图示出该应用情况。商用车101在其初始位置102中和其目标位置103中被示出。商用车101沿行驶路径108、109、110从初始位置102送往到其目标位置103中。在目标位置103,商用车101可以钩挂至鞍式挂车104。商用车101包括传感器107。在此,目标位置103的感测有利地可以通过鞍式挂车104上的至少两个能够能以不同方式探测的参照标记105、106执行。移动期间,传感器107测量相对于两个参照标记105、106的间距以及方向。
40.图3以示意性侧视图示出一种应用情况,其中,目标位置是装载位置。图4以示意性俯视图示出该应用情况。示出包含传感器303的商用车301在其装卸平台302的目标位置处。目标位置相对于装卸平台302如下固定,即,在该处,商用车301可以装载或卸载。这种位置也可以利用传感器303有利地通过在装卸平台302上或其附近的、预先已知定位的能以不同方式探测的参照标记304、305来感测。传感器303测量相对于两个参照标记304、305的间距以及方向。
41.图5以示意性侧视图示出一种应用情况,其中,目标位置是加载能源的位置。图6以示意性俯视图示出该应用情况。示出包含工作介质接口502和传感器507的商用车501在其供给装置503的目标位置处。目标位置如下确定,即,在该处,通过工作介质管路504可以向商用车501供给工作介质,例如燃料、电池充电或液压液。这种位置也可以利用传感器507有利地通过在供给装置503上或其附近的、预先已知定位的能以不同方式探测的参照标记505、506来感测。传感器507测量相对于两个参照标记505、506的间距以及方向。
42.图7以俯视图说明送往的进展700的概念。此处未示出的商用车从初始位置701出发应当整体沿行驶路径703送往到目标位置702。送往期间在任意时间点,第一路径部分704从行驶路径703已经行至当前位置705。属于该时间点的送往的进展700可以通过自送往的开始701起所经过的行驶距离,也就是,第一路径部分704基于预测的整个行驶距离的路径长度(即,行驶路径703的路径长度)来说明。
43.商用车101、301、501的传感器107、303、507、1101例如可以是激光扫描器,或照相机,或摄像机。如果在目标位置施加至少两个预先已知定位的能以不同方式探测的参照标记105、106、304、305、505、506,则可以利用仅一个传感器实现方位和间距的确定。
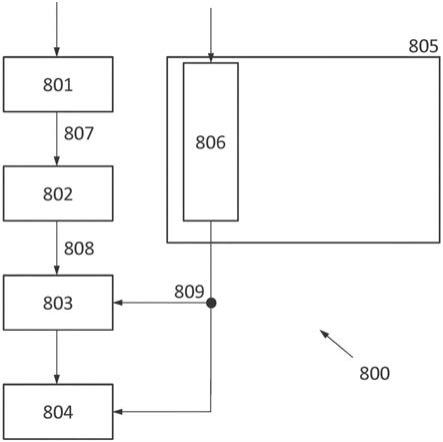
44.图8示出用于说明根据本发明方法800的框图。这种用于将商用车送往目标位置的控制方法800包括:
[0045]-感测801商用车相对于目标位置的相对位置807,
[0046]-然后以如下方式从相对位置807推导802商用车的自动化的基于调节的横向控制808,即,横向控制808连同纵向控制一起将商用车送往803到目标位置中,
[0047]-附加地利用商用车的遥控接收设备805检查806,是否存在由位于商用车之外的操作人员1201利用遥控发送器1202生成的激活信号809,
[0048]-仅在首次存在激活信号809时才引入803根据横向控制808和纵向控制进行的对商用车的送往,以及
[0049]-当激活信号809消失时,中断804送往并且例如通过适当制动措施使得商用车停住。
[0050]
图9示出用于说明根据本发明方法的有利扩展900的框图。扩展900包括:
[0051]-利用遥控接收设备805附加地接收904由操作人员1201输入的与时间相关的纵向控制信号905,
[0052]-根据横向控制808和所接收的纵向控制信号905执行903送往。
[0053]
图10示出用于说明根据本发明方法的有利扩展1000的框图。扩展1000包括:
[0054]-利用遥控接收设备805附加地接收1001由操作人员1201生成的水平调节信号1002,
[0055]-送往期间,根据所接收的水平调节信号1002引导1003商用车中存在的水平调节设备。
[0056]
如果目标位置是钩挂位置103,则通过操作人员1201遥控引导1003水平调节设备例如是有利的,这是因为这种用于卡接的联接始终需要牵引车101相对于挂斗/挂车104的足够精确的高度调节。可由操作人员1201预定水平调节信号有利之处在于,目标位置是装卸平台302上的装载位置,这是因为借此可以实现从装卸平台302无阶梯地过渡进入商用车301内部。
[0057]
还有利的是,利用遥控接收设备805附加地接收由操作人员1201生成的水平调节信号1002,在送往1003期间,根据所接收的水平调节信号1002引导商用车的水平调节设备。
[0058]
还有利的是,在首次感测801相对位置作为初始位置时校验,究竟是否能够从该初始位置送往至目标位置,在否定情况下,无法引入送往。可选地可以向操作人员1201告知此情况。
[0059]
还有利的是,送往期间校验究竟,是否可以按照预定且无误地结束剩下的送往,在否定情况下,送往被中断。可选地可以向操作人员1201告知此情况。
[0060]
图11示出用于说明根据本发明的控制设备1100的框图。控制设备1100包括:
[0061]-传感器1101,其设立用于感测商用车相对于目标位置的相对位置1102,
[0062]-横向控制1103,其设立用于基于感测的相对位置1102自动化且基于调节地如下地横向控制商用车,即,横向控制连同纵向控制一起通过作用于1107商用车的作用设备1106来将商用车送往到目标位置中,和
[0063]-遥控接收设备1104,其设立用于检查由位于商用车之外的操作人员1201利用遥控发送器1202生成的激活信号1105的存在。
[0064]
控制设备1100设立用于,仅当首次存在激活信号1105时开始根据横向控制和纵向控制进行对商用车的送往,并且用于,在激活信号1105消失时,中断后续的送往并且通过作用于1107作用设备1106使得商用车停住。
[0065]
图12以示意性俯视图示出一种应用情况,操作人员1201已从商用车1211下车。示出商用车1211在其初始位置1208中,且虚线示出商用车的目标位置1209(应当沿行驶路径1213将商用车送至该处)。商用车包括:
[0066]-作用设备1204,利用其例如可以作用于车轮1214,
[0067]-根据本发明的控制设备1210,控制设备用于经由作用设备1204将商用车1211从其初始位置1208送往到其目标位置1209中,
[0068]-遥控接收设备1203,其设立用于接收操作人员1201利用遥控发送器1202生成的遥控信号1212,和
[0069]-传感器1207,其设立用于给控制设备1210提供相对于参照标记1205、1206的间距以及方向。
[0070]
遥控接收设备805、1203有利地设立用于,附加接收由操作人员1201输入的与时间有关的纵向控制信号905,控制设备1100、1210设立用于根据横向控制808和所接收的纵向控制信号905执行送往1213。
[0071]
根据本发明的商用车101、301、501、1211用于执行根据权利要求1至7的控制方法800,和/或具有根据权利要求8至9所述的控制设备1100、1210。
[0072]
图13示出纵向控制信号l1303和横向控制q1304关于共同时间轴t1301的示例曲线。附图示出,纵向控制信号l在当前速度的意义下绝不超过正的最大速度1302和负的最大速度1305。最大速度1302、1305也可以动态地例如匹配不同的行驶状况。
[0073]
附图标记列表(说明书组成部分)
[0074]
101
ꢀꢀꢀꢀꢀꢀꢀ
商用车
[0075]
102
ꢀꢀꢀꢀꢀꢀꢀ
初始位置
[0076]
103
ꢀꢀꢀꢀꢀꢀꢀ
目标位置
[0077]
104
ꢀꢀꢀꢀꢀꢀꢀ
鞍式挂车
[0078]
105
ꢀꢀꢀꢀꢀꢀꢀ
参照标记
[0079]
106
ꢀꢀꢀꢀꢀꢀꢀ
参照标记
[0080]
107
ꢀꢀꢀꢀꢀꢀꢀ
传感器
[0081]
108
ꢀꢀꢀꢀꢀꢀꢀ
行驶路径
[0082]
109
ꢀꢀꢀꢀꢀꢀꢀ
行驶路径
[0083]
110
ꢀꢀꢀꢀꢀꢀꢀ
行驶路径
[0084]
301
ꢀꢀꢀꢀꢀꢀꢀ
商用车
[0085]
302
ꢀꢀꢀꢀꢀꢀꢀ
装卸平台
[0086]
303
ꢀꢀꢀꢀꢀꢀꢀ
传感器
[0087]
304
ꢀꢀꢀꢀꢀꢀꢀ
参照标记
[0088]
305
ꢀꢀꢀꢀꢀꢀꢀ
参照标记
[0089]
501
ꢀꢀꢀꢀꢀꢀꢀ
商用车
[0090]
502
ꢀꢀꢀꢀꢀꢀꢀ
工作介质接口
[0091]
503
ꢀꢀꢀꢀꢀꢀꢀ
供给装置
[0092]
504
ꢀꢀꢀꢀꢀꢀꢀ
工作介质管路
[0093]
505
ꢀꢀꢀꢀꢀꢀꢀ
参照标记
[0094]
506
ꢀꢀꢀꢀꢀꢀꢀ
参照标记
[0095]
507
ꢀꢀꢀꢀꢀꢀꢀ
传感器
[0096]
701
ꢀꢀꢀꢀꢀꢀꢀ
初始位置,送往的开始
[0097]
702
ꢀꢀꢀꢀꢀꢀꢀ
目标位置
[0098]
703
ꢀꢀꢀꢀꢀꢀꢀ
行驶路径
[0099]
704
ꢀꢀꢀꢀꢀꢀꢀ
路径部分
[0100]
705
ꢀꢀꢀꢀꢀꢀꢀ
当前位置
[0101]
800
ꢀꢀꢀꢀꢀꢀꢀ
方法
[0102]
801
ꢀꢀꢀꢀꢀꢀꢀ
方法步骤感测
[0103]
802
ꢀꢀꢀꢀꢀꢀꢀ
方法步骤推导
[0104]
803
ꢀꢀꢀꢀꢀꢀꢀ
方法步骤送往的引入,送往
[0105]
804
ꢀꢀꢀꢀꢀꢀꢀ
方法步骤送往或者说制动的中断
[0106]
805
ꢀꢀꢀꢀꢀꢀꢀ
遥控接收设备
[0107]
806
ꢀꢀꢀꢀꢀꢀꢀ
方法步骤检查激活信号
[0108]
807
ꢀꢀꢀꢀꢀꢀꢀ
相对位置
[0109]
808
ꢀꢀꢀꢀꢀꢀꢀ
横向控制
[0110]
809
ꢀꢀꢀꢀꢀꢀꢀ
激活信号
[0111]
900
ꢀꢀꢀꢀꢀꢀꢀ
方法的扩展
[0112]
903
ꢀꢀꢀꢀꢀꢀꢀ
方法步骤送往的执行,送往
[0113]
904
ꢀꢀꢀꢀꢀꢀꢀ
方法步骤接收纵向控制信号
[0114]
905
ꢀꢀꢀꢀꢀꢀꢀ
纵向控制信号
[0115]
1000
ꢀꢀꢀꢀꢀꢀ
方法的扩展
[0116]
1001
ꢀꢀꢀꢀꢀꢀ
方法步骤接收水平调节信号
[0117]
1002
ꢀꢀꢀꢀꢀꢀ
水平调节信号
[0118]
1003
ꢀꢀꢀꢀꢀꢀ
方法步骤借助引导水平调节设备送往
[0119]
1100
ꢀꢀꢀꢀꢀꢀ
控制设备
[0120]
1101
ꢀꢀꢀꢀꢀꢀ
传感器
[0121]
1102
ꢀꢀꢀꢀꢀꢀ
相对位置
[0122]
1103
ꢀꢀꢀꢀꢀꢀ
横向控制设备
[0123]
1104
ꢀꢀꢀꢀꢀꢀ
遥控接收设备
[0124]
1105
ꢀꢀꢀꢀꢀꢀ
激活信号
[0125]
1106
ꢀꢀꢀꢀꢀꢀ
作用设备
[0126]
1107
ꢀꢀꢀꢀꢀꢀ
方法步骤进行作用
[0127]
1201
ꢀꢀꢀꢀꢀꢀ
操作人员
[0128]
1202
ꢀꢀꢀꢀꢀꢀ
遥控发送器
[0129]
1203
ꢀꢀꢀꢀꢀꢀ
遥控接收设备
[0130]
1204
ꢀꢀꢀꢀꢀꢀ
作用设备
[0131]
1205
ꢀꢀꢀꢀꢀꢀ
参照标记
[0132]
1206
ꢀꢀꢀꢀꢀꢀ
参照标记
[0133]
1207
ꢀꢀꢀꢀꢀꢀ
传感器
[0134]
1208
ꢀꢀꢀꢀꢀꢀ
初始位置
[0135]
1209
ꢀꢀꢀꢀꢀꢀ
目标位置
[0136]
1210
ꢀꢀꢀꢀꢀꢀ
控制设备
[0137]
1211
ꢀꢀꢀꢀꢀꢀ
商用车
[0138]
1212
ꢀꢀꢀꢀꢀꢀ
遥控信号
[0139]
1213
ꢀꢀꢀꢀꢀꢀ
行驶路径,送往
[0140]
1214
ꢀꢀꢀꢀꢀꢀ
车轮
[0141]
1301
ꢀꢀꢀꢀꢀꢀ
时间轴t
[0142]
1302
ꢀꢀꢀꢀꢀꢀ
正的最大速度
[0143]
1303
ꢀꢀꢀꢀꢀꢀ
纵向控制信号l
[0144]
1304
ꢀꢀꢀꢀꢀꢀ
横向控制q
[0145]
1305
ꢀꢀꢀꢀꢀꢀ
负的最大速度
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1