提升转向系统和方法与流程
提升转向系统和方法
1.相关申请的交叉引用
2.本技术要求于2019年4月5日提交的序列号为62/830,176的美国临时专利申请的优先权,其内容通过引用整体合并于此。
背景技术:
3.许多提升装置被设计成可移动。提升装置通常配备有结合到提升装置的基座中的传动系。传动系可向车轮供应可旋转动力,车轮继而旋转以移动提升装置。与提升装置的工作平台一样,通常使用液压缸来控制车轮的定向。液压缸需要使用高压液压流体。
技术实现要素:
4.一个示例性实施方式涉及一种转向系统。转向系统包括第一车轮、与第一车轮间隔开的第二车轮、第一横拉杆、第二横拉杆和电致动器。第一车轮可旋转地联接到第一转向节,该第一转向节可绕第一悬挂柱枢转。第二车轮可旋转地联接到第二转向节,该第二转向节可绕第二悬挂柱枢转。第一横拉杆具有枢转地联接到第一转向节的第一端和枢转地联接到机械连杆的第二端。第二横拉杆具有枢转地联接到第二转向节的第一端和枢转地联接到机械连杆的第二端。电致动器联接到机械连杆。电致动器的移动使机械连杆轴向地平移。机械连杆的轴向移动使第一横拉杆相对于第一转向节枢转并且使第二横拉杆相对于第二转向节枢转。通过使第一横拉杆相对于第一转向节枢转来调节第一车轮相对于第一悬挂柱的定向。通过使第二横拉杆相对于第二转向节枢转来调节第二车轮相对于第二悬挂柱的定向。
5.另一示例性实施方式涉及一种提升装置。该提升装置具有基座、可伸缩提升机构、平台和转向系统。基座具有至少两个可旋转且可枢转的车轮。可伸缩提升机构的第一端联接到基座,而第二端联接到平台并支撑平台。转向系统定位在基座的外周边内并且在两个可枢转的车轮之间延伸。转向系统包括第一转向节、第二转向节、第一横拉杆、第二横拉杆和电致动器。第一转向节和第二转向节均联接到可枢转的车轮中的一个。第一横拉杆具有枢转地联接到第一转向节的第一端和枢转地联接到纵拉杆的第二端。第二横拉杆具有枢转地联接到第二转向节的第一端和枢转地联接到纵拉杆的第二端。电致动器联接到纵拉杆。电致动器的移动使纵拉杆轴向地平移。纵拉杆的轴向移动使第一横拉杆相对于第一转向节枢转,并使第二横拉杆相对于第二转向节枢转,这调节了可枢转的车轮的定向。例如,可伸缩提升机构可以是剪刀式提升机或吊杆提升机。
6.另一示例性实施方式涉及一种剪刀式提升机。该剪刀式提升机包括基座、可伸缩提升机构、平台和转向系统。基座具有两个前轮和两个后轮。可伸缩提升机构具有联接到基座的第一端,并且具有线性致动器,以使可伸缩提升机构在收起位置和展开位置之间转换。平台联接到可伸缩提升机构的第二端并由该第二端支撑。转向系统在两个前轮之间延伸,并且包括第一转向节、第二转向节、第一横拉杆、第二横拉杆和电动线性致动器。第一转向节和第二转向节均联接到前轮中的一个。第一横拉杆具有枢转地联接到第一转向节的第一
端和枢转地联接到纵拉杆的第二端。第二横拉杆具有枢转地联接到第二转向节的第一端和枢转地联接到纵拉杆的第二端。该电动线性致动器联接到该纵拉杆。电动线性致动器沿着第一轴线的移动使纵拉杆沿着平行于第一轴线的第二轴线平移。纵拉杆沿第二轴线的移动使第一横拉杆相对于第一转向节枢转,并使第二横拉杆相对于第二转向节枢转,这调节了两个前轮相对于基座的定向。
7.本发明能够有其它实施方式并且能够以各种方式来执行。替代的示例性实施方式涉及如本文中可引用的其它特征和特征的组合。
附图说明
8.从以下结合附图的详细描述中,本公开将变得更全面地被理解,其中相同的附图标记指代相同的元件,其中:
9.图1a是根据示例性实施方式的呈剪刀式提升机形式的提升装置的侧视立体图;
10.图1b是图1a的剪刀式提升机的另一侧视立体图;
11.图2是图1a的剪刀式提升机的后视图,示出了各种车辆控制器;
12.图3是图1b的转向系统的仰视立体图;
13.图4是图1b的单独示出的转向系统的俯视立体图;
14.图5是图4的转向系统的俯视图;
15.图6a是图1b的转向系统的俯视立体图,其中提升装置逆时针转向;
16.图6b是图6a的转向系统的仰视图;
17.图7a是图1b的转向系统的俯视立体图,其中车辆顺时针转向;
18.图7b是图7a的转向系统的仰视图;
19.图8是根据示例性实施方式的另一转向系统的俯视正视立体图;
20.图9是图8的转向系统的俯视图;
21.图10是图8的转向系统的俯视后视立体图;
22.图11是根据示例性实施方式的另一转向系统的示意图;
23.图12是根据示例性实施方式的另一转向系统的示意图;
24.图13是根据示例性实施方式的另一转向系统的示意图;
25.图14是根据示例性实施方式的另一转向系统的示意图;
26.图15是根据示例性实施方式的另一转向系统的俯视立体图;以及
27.图16是根据另一示例性实施方式的呈吊杆提升机形式的另一提升装置的侧视立体图。
具体实施方式
28.在转向详细示出示例性实施方式的附图之前,应当理解,本技术不限于在说明书中阐述的或在附图中示出的细节或方法。还应当理解,术语仅用于描述的目的,而不应当被认为是限制性的。
29.总体上参考附图,本文公开的各种示例性实施方式涉及用于使诸如剪刀式提升机或吊杆提升机的提升装置转向的系统、设备和方法。转向系统结合电动线性致动器和纵拉杆,所述电动线性致动器和纵拉杆可沿平行轴线移动以使提升装置的车轮转向。转向系统
通过在操作期间将线性致动器与转向系统内的其它部件隔离来克服通常与线性致动器相关联的横向负载限制。将线性致动器与转向系统内的其余部件隔离防止线性致动器经受不期望的和潜在的破坏性非线性负载。使用本公开的转向系统,电动线性致动器可以充分地代替通常存在于提升装置的转向系统内的液压缸。移除液压缸至少部分地消除了对提升装置上的加压液压流体的需要,该加压液压流体可能遭受泄漏并且难以维修。在结合有电动提升致动器的实施方式中,易于泄漏的液压流体可以从提升装置被完全消除,以产生全电动提升装置。
30.现在参考图1a和图1b,示出了提升装置10。提升装置10可以采用能够同时运送使用者和移动升降工作平台(mewp)的车辆的形式。提升装置10可以是例如剪刀式提升机或吊杆提升机(例如,图16所示的吊杆提升机810),该提升装置可以用于在各种高度处执行各种不同的任务。提升装置10包括由围绕基座12定位的车轮14a、14b支撑的基座12。示为剪刀式提升机构16的可伸缩提升机构联接到基座12并支撑工作平台18。如图3所示,剪刀式提升机构16的第一端20锚固到基座12,而剪刀式提升机构16的第二端22支撑工作平台18。
31.在一些实施方式中,剪刀式提升机构16由一系列链接的可折叠的支撑构件23形成。剪刀式提升机构16可使用致动器24选择性地在缩回位置或收起位置和展开位置或工作位置之间移动。致动器24例如可以是电动线性致动器。致动器24通过选择性地向剪刀式提升机构16施加力来控制剪刀式提升机构16的定向。当致动器24向剪刀式提升机构16施加足够的力时,剪刀式提升机构16从收起的静止位置打开或以其它方式展开。由于工作平台18联接到剪刀式提升机构16,因此工作平台18也响应于提升机构16的展开而远离基座12升高。尽管被描述为电动线性致动器,但致动器24也可以采用液压缸(未示出)或气动缸(未示出)的形式。
32.电池26可以定位在提升装置10的基座12上,以向存在于提升装置10上的各种操作系统供应电力。电池26可以是可再充电的锂离子电池,例如,该电池能够向提升装置10控制器、马达、致动器(例如,致动器24)等提供直流电流(dc)或交流电流(ac)。电池26可以包括至少一个输入端28,该至少一个输入端能够接收电流以对电池26再充电。在一些实施方式中,输入端28是能够接收与外部电源(如壁装电源插座)电连通的插头(未示出)的端口。电池26可被构造成接收和存储来自传统的120v插座、240v插座、480v插座、发电机或其它合适的电源中的一种的电流。在一些实施方式中,电池26与提升控制器27(图2中示出)通信,该提升控制器可以命令电池26选择性地向致动器24供应电力,以控制工作平台18和剪刀式提升机构16的高度和/或位置。
33.电池26可与车辆控制器29通信,如图5所示,该车辆控制器选择性地控制从电池26到马达30的电力供应以驱动提升装置10。马达30可以是例如ac马达(例如同步、异步等)或dc马达(分流、永磁体、串联等),马达从电池26或提升装置10上的其它电源接收电力并将电力转换成驱动轴(未示出)中的旋转能量。驱动轴可以用于使用变速器(未示出)驱动提升装置10的车轮14a、14b。变速器可以从驱动轴接收扭矩,并随后将接收到的扭矩传递到提升装置10的后轴32。使后轴32旋转也使提升装置10上的后轮14a旋转,这推进提升装置10。
34.提升装置10的后轮14a可用于驱动提升装置10,而前轮14b可用于使提升装置10转向。在一些实施方式中,后轮14a刚性地联接到后轴32,并相对于提升装置10的基座12被保持在恒定的定向(例如,大致与外周边34对齐)。相反,前轮14b枢转地联接到提升装置10的
基座12。前轮14b可以联接到安装到基座12前部的竖直悬挂柱36、38。车轮14b可以相对于基座12绕竖直悬挂柱36、38旋转(例如,使用车轮转向节),以调节提升装置10的行进方向。
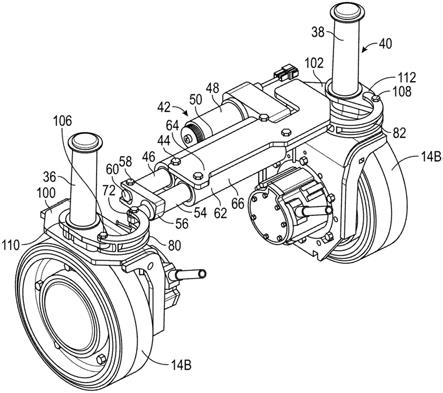
35.前轮14b可以使用转向系统40定向,如图3至图5中另外详细描述的。转向系统40是主动可调系统,该转向系统使用线性致动器42代替液压缸来操作。转向系统40例如可以安装到提升装置10的基座12的下侧,并且机械地联接到两个前轮14b中的每一个(例如,使用紧固件44)。在一些实施方式中,转向系统40完全容纳在提升装置10的基座12的外周边34内。如下面更详细的解释的,线性致动器42可以移动到各种不同的位置,以将提升装置10的前轮14b定向在提升装置10行进的期望方向上。
36.线性致动器42包括使用马达48可绕轴线x-x移动的活塞46。马达48可被接收在联接到提升装置10的基座12的下侧的壳体50内。与马达30类似,线性致动器42内的马达48被供应来自电池26的电力。马达48使容纳在壳体50内的驱动轴(未示出)旋转,该驱动轴又驱动带或(一个或多个)齿轮。带或齿轮可用于将扭矩从驱动轴传递到旋转的丝杠(未示出)。丝杠的旋转运动驱动联接到活塞46的丝杠螺母(未示出),当丝杠旋转时,该丝杠螺母沿着轴线x-x围绕丝杠线性地平移。活塞46可以移入或移出壳体50。
37.线性致动器42联接到使提升装置10的前轮14b旋转的机械连杆。该机械连杆包括与线性致动器42的活塞46一致移动的纵拉杆54。纵拉杆54可以是例如使用连杆56安装到活塞46的细长杆或管。连杆56枢转地联接到活塞46并刚性地安装到纵拉杆54。在一些实施方式中,连杆56焊接到纵拉杆54并用销安装到活塞46。销58可以延伸穿过连杆56和活塞46的远端60,以将连杆56固定到活塞46。
38.纵拉杆54的允许运动可以由线性致动器42的活塞46连同轴承壳体62一起掌控。轴承壳体62可以包括安装凸缘64和远离安装凸缘64延伸的套筒66。安装凸缘64包括被设计成齐平地坐落在基座12的下侧上的平坦表面。安装套筒66限定穿过轴承壳体62的圆柱形通道,该圆柱形通道可以接收纵拉杆54。在一些实施方式中,圆柱形通道被设计成与纵拉杆54形成间隙配合。轴承壳体62可以包括一个或多个轴承(未示出)以帮助促进纵拉杆54穿过套筒66的滑动移动。替代地,轴承壳体62的安装套筒66可以包括润滑剂(例如油)以帮助促进纵拉杆54和安装套筒66之间的滑动运动。一个或多个密封件(未示出)可以定位在纵拉杆54和轴承壳体62之间以避免润滑剂泄漏。在一些实施方式中,纵拉杆54和安装套筒66被布置成使得纵拉杆54沿着第二轴线y-y平移,该第二轴线y-y可以平行于轴线x-x。纵拉杆54和安装套筒66可以在提升装置10的前轮14b之间大致居中。
39.纵拉杆54的每个端部68、70可以包括安装突片72、74。安装突片72、74均可以提供围绕通孔76、78的大致平坦的表面。通孔76、78适于接收例如可以将纵拉杆54连接到附加部件的紧固件或销。安装突片72、74可以与纵拉杆54一体(连续地)形成,或者以其它方式刚性地安装到纵拉杆54。在一些实施方式中,安装突片72、74焊接到纵拉杆54的每个端部68、70。替代地,通孔可以形成在纵拉杆54中并靠近纵拉杆54的每个端部68、70,使得可以省略安装突片72、74。
40.如图3至图5所示,纵拉杆54的安装突片72、74均可以支撑横拉杆80、82。第一横拉杆80枢转地安装到纵拉杆54的第一端68上的安装突片72,而第二横拉杆82枢转地安装到纵拉杆54的第二端70上的安装突片74。销84、86可用于将横拉杆80、82中的一个的第一端88、90可旋转地安装到纵拉杆54的每个端部68、70。横拉杆80、82均可以悬挂在提升装置10的基
座12下方。
41.每个横拉杆80、82的相对的第二端92、94可联接到提升装置10的前轮14b中的一个。与第一端88、90类似,横拉杆80、82的第二端92、94也可接收销96、98以将横拉杆80、82联接到前轮14b。销联接件将横拉杆80、82牢固地链接到车轮14b,同时允许前轮14b和安装到该前轮的横拉杆80、82之间的一些有限的旋转运动。在一些实施方式中,车轮14b使用车轮转向节100、102联接到横拉杆80、82。车轮转向节100、102均支撑前轮14b,并可旋转地安装到提升装置10的基座12。车轮转向节100、102的定向控制前轮14b的定向,并因此控制提升装置10的转向。前轮14b可以绕车轮转向节100、102旋转以使提升装置10移动。
42.横拉杆80、82可具有被设计成处理拉伸负载的弓形形状。例如,每个横拉杆80、82可由在约135度至215度之间成角度地延伸的刚性弧形构件限定。如图5中示出的,每个横拉杆80、82由在第一端88、90和第二端92、94之间延伸大约180度的弧限定。该弧可以由恒定半径或替代地由可变半径限定。类似地,横拉杆80、82可以由整体上均匀的厚度限定,或者可以变化。例如,横拉杆80、82的厚度可以随着远离端部88、90、92、94中的每一个的距离的增加而增加(例如,最大材料厚度的点出现在每个横拉杆80、82的中心附近)。在一些实施方式中,横拉杆80、82具有相同的尺寸。
43.前轮14b的定向和提升装置10的转向更广泛地可以使用转向系统40来控制。如图3至图7b所示,形成在线性致动器42、纵拉杆54、横拉杆80、82和车轮转向节100、102之间的机械连杆形成由线性致动器42控制的阿克曼几何转向系统40。具体地,活塞46的位置确定了提升装置10的前轮14b的定向。同时,活塞46和纵拉杆54之间的可枢转联接件部分地将活塞46与纵拉杆54隔离,并确保仅线性力与线性致动器42的活塞46相互作用。活塞46和纵拉杆54的双销性质减小了活塞46的横向负载。
44.转向系统40的线性致动器42与电池26和车辆控制器29两者电通信。车辆控制器29被构造成接收和执行转向命令。在一些实施方式中,线性致动器42硬连线到电池26和车辆控制器29两者。当车辆控制器29接收到转向命令(例如,来自用户的通过方向盘或操纵杆的期望转向定向)时,车辆控制器29可以首先确定前轮14b的当前定向。通过检测(例如,使用传感器或编码器)或以其它方式知道线性致动器42的活塞46的当前位置来确定前轮14b的当前定向。如果期望的转向定向与前轮14b的当前定向不匹配,则车辆控制器29可以向线性致动器42的马达48发出命令,以使活塞46相对于壳体50缩回或进一步前进。在一些其它实施方式中,转向系统40和车辆控制器29通过调节线性致动器42来响应来自用户的命令(例如,通过方向盘或操纵杆),而不使用或不需要当前的前轮14b定向信息。
45.如果车辆控制器29接收到使前轮14b进一步逆时针定向的指令,则马达48可以启动以使活塞46进一步缩回到壳体50中。如图6a和图6b所示,活塞46定位在完全缩回位置。因为纵拉杆54联接到活塞46,所以纵拉杆54沿着第二轴线y-y横向跟随活塞46。当纵拉杆54由活塞46调节时,纵拉杆54的端部68、70和联接到纵拉杆54的端部68、70的横拉杆80、82也横向移动。因为横拉杆80、82的自由度受到横拉杆80、82的每个端部88、90、92、94上的可旋转联接件的限制,所以当活塞46移动时,车轮转向节100、102旋转。
46.形成在车轮转向节100、102、横拉杆80、82和纵拉杆54之间的可旋转联接件响应于纵拉杆54的横向移动而使前轮14b旋转。如图5所示,每个横拉杆80、82的第二端92、94偏心地联接到车轮转向节100、102,与车轮转向节100、102的旋转点106、108偏移。横拉杆80、82
可以枢转地联接到从旋转点106、108向前延伸的车轮转向节100、102的凸缘110、112(当前轮14b正直向前定向时)。由于横拉杆80、82偏心地安装到凸缘110、112,纵拉杆74的移动传递横拉杆80内的张力和横拉杆82内的压缩力,该张力和压缩力对每个车轮转向节100、102产生足以使车轮转向节100、102绕其相应的旋转点106、108旋转的扭矩。车轮转向节100、102绕旋转点106、108的旋转使前轮14b绕竖直悬挂柱36、38旋转,并改变提升装置10的转向定向。由于后轮14a相对于提升装置10的基座12固定在向前对齐的定向,所以旋转前轮14b使车辆在前轮14b指向的方向上转向。
47.如果车辆控制器29改为接收使前轮14b进一步顺时针定向的命令,则马达48可以启动以使活塞46从壳体50进一步向外前进。如图7a和图7b所示,活塞46定位在完全暴露位置。如上所述,纵拉杆54联接到活塞46,并且当活塞46沿轴线x-x前进时,与活塞46一起沿第二轴线y-y横向移动。当纵拉杆54由活塞46调节时,纵拉杆54的端部68、70和联接到纵拉杆54的端部68、70的横拉杆80、82也横向移动。
48.再一次,形成在车轮转向节100、102、横拉杆80、82和纵拉杆54之间的可旋转联接件响应于纵拉杆54的横向移动而使前轮14b旋转。形成在每个横拉杆80、82的第二端92、94和车轮转向节100、102之间的偏心联接件将一个车轮转向节100向外推动(传递压缩力)并将另一个车轮转向节102朝向提升装置10的基座12向内拉动(传递张力)。当车轮转向节100、102旋转时,前轮14b绕旋转点106、108转动,这改变了提升装置10的转向。
49.各种替代部件布置可以结合到根据本公开的提升装置10的转向系统40中。例如,纵拉杆54可定位在线性致动器42的前面,而不是后面。每个横拉杆80、82也可以使用不同的弧长和形状。在一些实施方式中,横拉杆80、82是线性部件。在其它实施方式中,转向系统40可以结合到提升装置10的后轮14a中,而不是前轮中。除了剪刀式提升机,提升装置10可以是铰接吊杆、伸缩吊杆或其它类型的mewp。转向系统40与几乎任何类型的电动车辆兼容并且可以结合到几乎任何类型的电动车辆中。在其它实施方式中,线性致动器42可以用液压缸代替。
50.现在参考图8至图10,描述了示出为转向系统240的转向系统的另一示例性实施方式。与转向系统40类似,转向系统240被构造成使提升装置10的前轮14b定向。在一些实施方式中,转向系统240可以用来代替上述转向系统40。以下描述将主要集中在转向系统240和转向系统40之间的差异上。然而,将理解的是,转向系统40和/或转向系统240的各个方面可以互换。也就是说,在一些实施方式中,转向系统40的各个方面可以实现到转向系统240中,反之亦然。
51.如图所示,转向系统240类似地包括线性致动器242,该线性致动器包括可使用马达248轴向移动的活塞246。马达248与马达48类似地起作用,并且类似地由电池26供电,以选择性地使活塞246移入和移出壳体250。线性致动器242类似地联接到与活塞246一致地移动的纵拉杆254。活塞246类似地枢转地联接到连杆256,该连杆刚性地联接到纵拉杆254,从而有效地将活塞246联接到纵拉杆254。
52.纵拉杆254的允许运动可以由线性致动器242的活塞246以及辊壳体276来掌控。辊壳体276包括引导部件278和辊部件280。引导部件278使用各种连接连杆282和紧固件284刚性地联接到辊部件280。引导部件278包括引导通道286(图8中示出),该引导通道被构造成可滑动地接收纵拉杆254。在一些实施方式中,引导通道286可具有内部轴承(未示出)以帮
助促进纵拉杆254穿过引导通道286的滑动运动。在一些其它实施方式中,引导通道286可以包括润滑剂(例如,油)以帮助促进纵拉杆254穿过引导通道286的滑动运动。
53.辊部件280包括设置在辊部件280的相对轴向端部处的一对辊288。该对辊288被构造成接合纵拉杆254的与引导通道286相反的横向侧。在一些实施方式中,该对辊288包括高强度塑料材料。例如,该对辊288可以包括超高分子量聚乙烯(uhmw)。该对辊288也可以包括各种其它材料,其可以基于预期应用进行选择。该对辊288可被构造成在使用期间既用作纵拉杆254的稳定器,又用作减震器以进一步将活塞246与横向力隔离。
54.这样,纵拉杆254可滑动地被接收在辊壳体276内在引导部件278和辊部件280之间,并且被构造成在辊壳体276内轴向地滑动。纵拉杆254的每个端部290、292类似地支撑并枢转地联接到横拉杆80、82中的对应横拉杆。因此,前轮14b的定向和提升装置10的转向更广泛地可以参照转向系统40以与上述方式几乎相同的方式使用转向系统240来控制。
55.除了该对辊288之外,转向系统240的各个部件可以包括高强度塑料材料。例如,在一些实施方式中,类似于该对辊288,转向系统240的各个部件可包括uhmw。在一些其它实施方式中,转向系统240的各个部件可包括金属材料。
56.现在参考图11,描述了示出为转向系统340的转向系统的另一示例性实施方式。与转向系统40、240类似,转向系统340被构造成使提升装置10的前轮14b定向。在一些实施方式中,转向系统340可以用来代替上述转向系统40、240。以下描述将主要集中在转向系统340与转向系统40、240之间的差异上。
57.转向系统340类似地包括被构造成选择性地致动活塞346的线性致动器342。活塞346类似地枢转地联接到连杆356,该连杆刚性地联接到纵拉杆354。纵拉杆354可滑动地被接收在一对线性轴承376内。线性轴承376被构造成允许纵拉杆354在与活塞346的轴向方向基本上平行的方向上轴向地滑动。每个端部390、392可类似地枢转地联接到横拉杆80、82中的对应横拉杆。这样,前轮14b的定向和提升装置10的转向更广泛地可以使用转向系统340以与上述参考转向系统40、240的方式几乎相同的方式来控制。此外,活塞346与连杆356之间的枢转联接件可允许活塞346至少部分地与不需要的横向负载隔离。
58.现在参考图12,描述了示出为转向系统440的转向系统的另一示例性实施方式。与转向系统40、240、340类似,转向系统440被构造成使提升装置10的前轮14b定向。在一些实施方式中,转向系统440可以用于代替上述转向系统40、240、340。以下描述将主要集中在转向系统440与上述转向系统40、240、340之间的差异上。
59.转向系统440包括旋转小齿轮476,该旋转小齿轮可以使用类似于马达48的电动马达(未示出)选择性地旋转。旋转小齿轮476与纵拉杆454接合并且被构造成选择性地轴向地致动纵拉杆454。具体地,小齿轮476的齿(未示出)被构造成接合纵拉杆454上的齿(未示出),以对纵拉杆454提供轴向力。可刚性地固定到提升装置10的底部的线性轴承478可滑动地接收纵拉杆454,并且被构造成将纵拉杆454保持在期望的轴向定向。每个端部490、492可以类似地枢转地联接到横拉杆80、82中的对应横拉杆。这样,前轮14b的定向和提升装置10的转向更广泛地可以使用转向系统440以与参考上述转向系统40、240、340的方式类似的方式来控制。用于使前轮14b旋转的转向系统440的自动型齿条-小齿轮型致动允许马达和小齿轮476紧凑地布置在提升装置10的中心处。
60.现在参考图13,描述了示出为转向系统540的转向系统的另一示例性实施方式。与
转向系统40、240、340、440类似,转向系统540被构造成使提升装置10的前轮14b定向。在一些实施方式中,转向系统540可以用于代替上述转向系统40、240、340、440。以下描述将主要集中在转向系统540与上述转向系统40、240、340、440之间的差异上。
61.转向系统540可以是基于链条或带的转向系统。具体地,转向系统540包括驱动齿轮组542、链条或同步带544、一对链轮或带轮546、连杆548、纵拉杆554和多个轴承556。驱动齿轮组542可以使用类似于马达48的电动马达选择性地旋转。驱动齿轮组542被构造成接合链条或同步带544并对该链条或同步带提供轴向力。该对链轮或带轮546被构造成接合链条或同步带544,该链条或同步带围绕链轮或带轮546缠绕以形成链条/同步带环。链条或同步带544的端部558刚性地联接到连杆548。这样,驱动齿轮组542的致动被构造成选择性地使连杆548轴向移动。
62.连杆548刚性地固定到纵拉杆554,该纵拉杆通过多个轴承556被保持在恒定的轴向定向。多个轴承556被构造成可滑动地接收纵拉杆554,使得纵拉杆554可以由连杆548选择性地致动。因此,驱动齿轮组542的选择性致动被构造成选择性地致动连杆548,并由此致动纵拉杆554。每个端部590、592可以类似地枢转地联接到横拉杆80、82中的对应横拉杆。这样,前轮14b的定向和提升装置10的转向更广泛地可以使用转向系统540以与参考上述转向系统40、240、340、440的方式类似的方式来控制。再一次,转向系统540的构造允许马达和驱动齿轮组542布置在提升装置10的中心处。此外,转向系统540的带式致动有效地将马达与任何横向冲击负载隔离。
63.现在参考图14,描述了示出为转向系统640的转向系统的另一示例性实施方式。与转向系统40、240、340、440、540类似,转向系统640被构造成使提升装置10的前轮14b定向。在一些实施方式中,转向系统640可以用于代替上述转向系统40、240、340、440、540。以下描述将主要集中在转向系统640与上述转向系统40、240、340、440、540之间的差异上。
64.转向系统640包括一对线性致动器642。线性致动器642中的每一个可被构造成基本上类似于上述线性致动器42。线性致动器642均包括可轴向移动的活塞646。活塞646中的每一个的远端枢转地联接到对应的横拉杆680、682。转向系统640的横拉杆680、682可以基本上类似于上述横拉杆80、82。每个横拉杆680、682的相对端可以枢转地联接到对应的凸缘684、686。凸缘684、686可联接到前轮14b并被构造成控制前轮的定向。因此,转向系统640有效地包括两个独立的转向子系统688,该转向子系统可共同用于更广泛地控制前轮14b和提升装置10的定向。转向子系统688的独立性质允许线性致动器642以不同定向安装在提升装置10的底部上。此外,转向子系统688的独立性质可允许更灵活的转向能力。另外,线性致动器642和横拉杆680、682之间的枢转连接连同横拉杆680、682和凸缘684、686之间的枢转连接可以消除施加到活塞646上的横向力。此外,线性致动器642和横拉杆680、682的直接安装可允许线性致动器642以较低的致动器速度运行。
65.现在参考图15,描述了示出为转向系统740的转向系统的又一示例性实施方式。与转向系统40、240、340、440、540、640类似,转向系统740被构造成使提升装置10的替换前轮14b定向。在一些实施方式中,转向系统740可以代替上述转向系统40、240、340、440、540、640使用。以下描述将主要集中在转向系统740与上述转向系统40、240、340、440、540、640之间的差异上。
66.转向系统740包括联接到可旋转的车轮凸缘744的车轮定向马达742。车轮定向马
达742可安装到基座12的底部上,并且被构造成选择性地使可旋转的车轮凸缘744旋转。可旋转的车轮凸缘744被构造成可旋转地联接到前轮14b中的对应前轮。在使用中,提升装置10可以具有用于前轮14b(或后轮14a)中的每一个的对应转向系统740,以在行驶时选择性地定向提升装置10。
67.应当理解,上述转向系统40、240、340、440、540、640、740的各个方面可以互换。也就是说,在一些实施方式中,转向系统40、240、340、440、540、640、740的各个方面可以实现到其它转向系统40、240、340、440、540、640、740中的任何一个中。
68.另外,虽然被包括在提升装置10上的可伸缩提升机构是剪刀式提升机构,但是在一些情况下,可以提供替代地包括吊杆提升机构形式的可伸缩提升机构的车辆。例如,在图16中所示的示例性实施方式中,示出了显示为车辆810的车辆。车辆810包括示出为吊杆提升机构816的可伸缩提升机构。吊杆提升机构816类似地由一系列链接的可折叠的支撑构件823形成。吊杆提升机构816可使用多个致动器824选择性地在缩回位置或收起位置与展开位置或工作位置之间移动。多个致动器824中的每一个可以是电动致动器。
69.有利地,车辆10、810可以是全电动提升装置。车辆10、810的所有电动致动器和电动马达可以被构造成执行它们相应的操作,而不需要任何液压系统、液压贮存罐、液压流体、发动机系统等。也就是说,车辆10、810两者通常可以完全没有任何液压系统和/或液压流体。换句话说,车辆10、810两者都可以没有任何移动流体。传统的提升装置不使用全电动系统,并且需要定期维护以确保各种液压系统正常工作。车辆10、810可以使用电动马达和电动致动器,这允许不存在可燃燃料(例如,汽油、柴油)和/或液压流体。这样,车辆10、810可以由电池供电,例如电池26,其可在必要时再充电。
70.尽管本说明书可以讨论方法步骤的特定顺序,但是步骤的顺序可以与所概述的不同。而且,可以同时或部分同时执行两个或更多步骤。这种变化将取决于所选择的软件和硬件系统以及设计者的选择。所有这些变化都在本公开的范围内。同样,软件实现方式可以利用标准编程技术来完成,该标准编程技术具有基于规则的逻辑和其它逻辑来完成各种连接步骤、处理步骤、比较步骤和判定步骤。
71.如本文所用,术语“近似”、“大约”、“基本上”和类似术语旨在具有与本公开的主题所属领域的普通技术人员的共同和公认用法相一致的广泛含义。阅读本公开内容的本领域技术人员应当理解,这些术语旨在允许描述所描述和要求保护的某些特征,而不将这些特征的范围限制在所提供的精确数值范围内。因此,这些术语应当被解释为指示所描述和要求保护的主题的非实质性或不重要的修改或变更被认为在如所附权利要求中所记载的本发明的范围内。
72.应当注意,如本文中用于描述各种实施方式的术语“示例性”旨在指示这样的实施方式是可能的实施方式的可能的示例、表示和/或说明(并且这样的术语不旨在意味着这样的实施方式必然是特别的或最好的示例)。
73.如本文所用,术语“联接”、“联接”等是指两个构件直接或间接地彼此接合。这种接合可以是固定的(例如,永久的等)或可移动的(例如,可移除的、可释放的等)。这种接合可以通过两个构件或两个构件和任何附加的中间构件彼此一体地形成为单个整体来实现,或者通过两个构件或两个构件和任何附加的中间构件彼此附接来实现。
74.本文对元件的位置的引用(例如,“顶部”、“底部”、“上方”、“下方”、“之间”等)仅用
于描述图中的各种元件的定向。应当注意,各种元件的定向可以根据其它示例性实施方式而不同,并且这样的变化旨在被本公开所涵盖。
75.重要的是要注意,如示例性实施方式中所示的转向系统的构造和布置仅是说明性的。尽管仅详细描述了本公开的几个实施方式,但是阅读本公开的本领域技术人员将容易理解,在本质上不脱离所述主题的新颖教导和优点的情况下,许多修改是可能的(例如,各种元件的大小、尺寸、结构、形状和比例、参数值、安装布置、材料的使用、颜色、定向等的变化)。例如,示出为整体形成的元件可以由多个部件或元件构成。应当注意,本文所述的元件和/或部件的组件可以由提供足够强度或耐久性的多种材料中的任何一种以多种颜色、纹理和组合中的任何一种构造。因此,所有这些修改都被包括在本发明的范围内。在不脱离本公开的范围或所附权利要求的精神的情况下,可以在优选和其它示例性实施方式的设计、操作条件和布置中进行其它替换、修改、改变和省略。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1