轮履切换式变体轮、轮履切换式驱动行走机构及轮履切换方法
1.本发明涉及车辆行走机构技术领域,具体是一种轮履切换式变体轮。
背景技术:
2.近年来,随着车辆装备和机器人技术的发展,作为关键组成部件的行走机构,也获得了飞速的发展。目前,传统的机动车辆和移动机器人的行走机构包括轮式、履带式、足腿式以及以上几种的复合形式。
3.为了兼顾轮式和履带式的优点,提高行走机构的机动性、越障爬坡能力等,近几年来一些轮履复合行走机构逐步问世,但其自身依然存在较多问题,常见的问题主要体现在:整体结构极为复杂和笨重,导致成本和运输能力增加;轮履状态切换极为不便或不彻底,无法实现很好的行走状态,依然无法满足一些特殊路况的行走需求;轮履状态切换的动力切换机构和系统较为复杂,切换存在卡顿、耗时长及延后等问题,导致轮履状态切换无法满足快速响应和稳定切换的要求。
技术实现要素:
4.本发明的目的在于克服现有技术的不足,提供了一种轮履切换式变体轮,该轮履切换式变体轮结构简单,轮履状态切换方便,可以实现快速、稳定的轮履状态和动力切换。
5.本发明的目的主要通过以下技术方案实现:
6.一种轮履切换式变体轮,包括轮辋、设于轮辋外的可变形履带及将二者连为一体的轮履切换机构;所述轮履切换机构包括连接于轮辋上的伸缩装置,伸缩装置的伸缩端连接有支架,支架转动连接有可伸缩履带驱动机构和可变形保持架,可变形保持架通过连接件与轮辋活动连接,所述伸缩装置伸缩带动可变形保持架变形驱使可变形履带切换为轮式或履带式,所述可伸缩履带驱动机构用于切换为履带式的可变形履带传动。
7.作为上述可伸缩履带驱动机构的进一步结构优化,所述可伸缩履带驱动机构包括履带驱动轮和伸缩传动轴组件,履带驱动轮设于可变形履带内侧并与可变形履带传动连接,所述伸缩传动轴组件贯穿支架并与履带驱动轮传动连接。
8.作为上述伸缩传动轴组件的进一步结构优化,所述伸缩传动轴组件包括由上外花键轴和下内花键轴组成的花键轴,所述上外花键轴设置有上传动齿轮,所述履带驱动轮的轮轴上设置有从动齿轮,从动齿轮与上传动齿轮啮合,所述下内花键轴贯穿轮辋后设置有下传动齿轮。
9.具体的,所述上外花键轴和下内花键轴均设置有轴向定位台阶,轴向定位台阶分别定位于支架和轮辋内。
10.具体的,所述上传动齿轮、从动齿轮、下传动齿轮均为锥齿轮。
11.具体的,所述花键轴并排平行设置于伸缩装置的内侧,且花键轴的最大伸缩长度大于或等于伸缩装置的最大伸缩长度。
12.作为上述可变形保持架的进一步结构优化,所述可变形保持架设置有两个,两个可变形保持架的一端均与支架铰接,所述可伸缩履带驱动机构位于两个可变形保持架之间,所述可变形保持架上均设置有辅助滚轮且可变形保持架外侧为弧形,所述可变形保持架内侧则与连接件铰接。
13.作为上述连接件的进一步结构优化,所述连接件为带有若干通槽的薄片结构,所述连接片一侧设有用于轮辋错位的错位缺口,所述连接片的两端均形成有带轴孔的连接部,连接部通过轴孔配合分别与可变形保持架和轮辋转动连接。
14.综上所述,与现有技术相比,本发明的有益效果如下:本发明基于轮履切换机构,可以实现轮履快速切换,且切换的同时实现动力转换,可以实现快速、稳定的轮履状态和动力切换,并且利用可收缩的花键轴实现可伸缩履带驱动机构的伸缩,使得可伸缩履带驱动机构与履带驱动轮和动力系统保持持续连接传动,在不影响状态切换的同时实现了稳定的传动,结构简单,传动稳定高效,且减轻了整体结构重量,且通过可变形保持架、连接件及伸缩装置可以对可变形履带起到很好的支撑和定位作用,能够很好的保持变体轮状态,提高其承载力和稳定性,可满足不同路况的行走需求。
15.作为本发明的技术延伸之一,本发明公开了一种轮履切换式驱动行走机构,该轮履切换式驱动行走机构包括驱动电机和上述的轮履切换式变体轮,所述驱动电机内部设有离合装置,所述驱动电机的输出端设置有行星减速器,行星减速器包括大齿圈、行星轮及行星架,大齿圈与轮辋内轮毂固连,大齿圈内侧通过行星轮连接有行星架,所述驱动电机的输出轴上设置有主动齿轮,主动齿轮与行星架固连并与所述下传动齿轮啮合。
16.本发明的驱动电机作为上述动力系统,通过下传动齿轮即可带动可伸缩履带驱动机构传动,并通过离合装置的控制,实现大齿圈转动或主动齿轮传动,进而实现轮式状态或履带式状态不同的动力切换输入,切换过程中可伸缩履带驱动机构始终与主动齿轮、履带驱动轮啮合,进而动力切换不会出现卡顿、传动失效的问题,切换稳定、响应速度快。
17.作为本发明的技术延伸之二,本发明公开了一种多轴无人作战平台,所述多轴无人作战平台位于前轴和后轴之间的一个或多个车轴上设置有上述的轮履切换式变体轮或上述的轮履切换式驱动行走机构。
18.本发明的多轴无人作战平台,由于采用了上述的轮履切换式变体轮或上述的轮履切换式驱动行走机构,可进行快速稳定的轮履状态切换,具有很好的稳定性和可靠性,能满足复杂路况的行走需求。
19.作为本发明的技术延伸之三,本发明公开了一种轮履切换式驱动行走机构的轮履切换方法,包括以下步骤:
20.s1轮式切换
21.伸缩装置收缩,带动可变形保持架转动,驱使可变形履带变形形成圆形,此时离合装置约束行星架使其停止转动,驱动电机的动力由输出轴经行星轮传递至大齿圈,通过大齿圈带动轮辋转动,完成轮式状态和传动切换;
22.s2履带式切换
23.伸缩装置伸出,带动可变形保持架转动,驱使可变形履带变形形成多边形,此时离合装置约束大齿圈使其停止转动,释放行星架带动主动齿轮转动,主动齿轮通过啮合的下传动齿轮带动履带驱动轮转动,履带驱动轮则驱动履带转动,完成履带式状态和传动切换。
24.本发明的轮履切换方法,可以实现轮履状态切换的同时实现动力系统的传动切换,实现快速稳定的轮履状态和传动状态同步切换,并且在切换快速稳定,传动平稳。
附图说明
25.此处所说明的附图用来提供对本发明实施例的进一步理解,构成本技术的一部分,并不构成对本发明实施例的限定。在附图中:
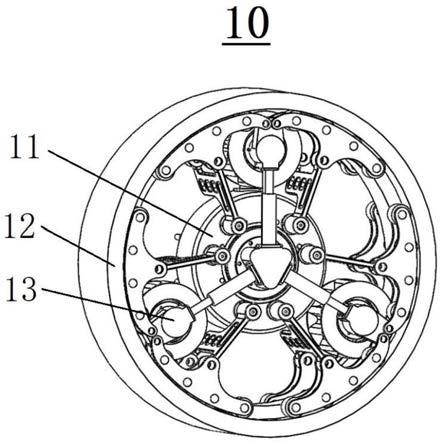
26.图1是轮履切换式变体轮的结构示意图,图中为轮式状态;
27.图2是轮履切换式变体轮的结构示意图,图中为履带式状态;
28.图3是轮履切换机构的立体结构示意图;
29.图4是轮履切换机构的正视图;
30.图5是轮履切换机构的侧视图;
31.图6是轮履切换机构的俯视图;
32.图7是轮履切换机构的爆炸图;
33.图8是伸缩传动轴组件的结构示意图;
34.图9是履带驱动轮1331的传动结构示意图;
35.图10是可变形保持架的结构示意图;
36.图11是轮履切换式驱动行走机构的结构示意图,图中为轮式状态;
37.图12是轮履切换式驱动行走机构的结构示意图,图中为履带式状态;
38.图13是轮履切换式驱动行走机构的部分传动结构示意图;
39.图14是轮履切换式驱动行走机构的轮履切换方法的流程简图;
40.图中的标号分别表示为:
41.10、轮履切换式变体轮;
42.11、轮辋;
43.12、可变形履带;
44.13、轮履切换机构;131、伸缩装置;132、支架;1321、伸缩支撑杆;133、可伸缩履带驱动机构;134、可变形保持架;1341、辅助滚轮;1342、转动连接部;135、连接件;1351、通槽;1352、错位缺口;1353、连接部;
45.1331、履带驱动轮;13311、从动齿轮;1332、伸缩传动轴组件;
46.13321、花键轴;133211、上外花键轴;1332111、上传动齿轮;133212、下内花键轴;1332121、下传动齿轮;133213、轴向定位台阶;
47.20、轮履切换式驱动行走机构;
48.201、驱动电机;2011、主动齿轮;
49.202、行星减速器;2021、大齿圈;2022、行星轮;2023行星架;
具体实施方式
50.为使本发明的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本发明作进一步的详细说明,本发明的示意性实施方式及其说明仅用于解释本发明,并不作为对本发明的限定。
51.作为本发明的第一个实施例,本发明公开了一种轮履切换式变体轮10,该轮履切
换式变体轮10可以作为行走机构或其组成部件,用于普通或特种车辆、无人战车或作战平台、各类机器人、移动设备等技术领域,其具有轮式状态和履带式状态两种形态,具有稳定高效的运动状态切换功能,且动力切换顺畅,运动状态和动力切换同步进行,响应快速,运行平稳,可满足不同复杂程度的路况行走需求。
52.如图1、图2所示,上述轮履切换式变体轮10至少包括轮辋11、设于轮辋11外的可变形履带12及将二者连为一体的轮履切换机构13。轮履切换机构13与轮辋11和可变形履带12均连接,用于在轮辋11支撑下改变可变形履带12的外形,使可变形履带12形成圆形或多边形,轮履切换式变体轮10变形为轮式结构或履带式结构。
53.如图3
‑
图6所示,轮履切换机构13包括连接于轮辋11上的伸缩装置131,伸缩装置131的伸缩端连接有支架132,支架132转动连接有可伸缩履带驱动机构133和可变形保持架134,可变形保持架134通过连接件135与轮辋11活动连接,所述伸缩装置131伸缩带动可变形保持架134变形驱使可变形履带12切换为轮式或履带式,所述可伸缩履带驱动机构133用于切换为履带式的可变形履带12传动。
54.本发明的轮履切换式变体轮10,利用伸缩装置131伸缩,带动可变形保持架134形态改变,进而在连接件135限制下,共同支撑并改变可变形履带12外形,使得可变形履带12形成圆形的轮式结构或多边形的履带式结构,实现轮履切换式变体轮10的轮式状态和履带式状态快速切换,与此同时,可伸缩履带驱动机构133在伸缩装置131伸缩时同步伸缩,当切换为履带式时,可伸缩履带驱动机构133作为可变形履带12的驱动机构,驱使可变形履带12转动,通过外部动力系统即可实现履带式的轮履切换式变体轮10传动,当切换为轮式时,外部动力系统则切换成直接带动轮辋11转动,即可实现轮式的轮履切换式变体轮10传动,从而在状态切换时利用可伸缩履带驱动机构133同步实现传动切换。本发明的轮履切换式变体轮10,状态切换方便快捷,且状态切换和传动切换同步进行,切换平稳顺畅,具有很高的稳定性和可靠性。
55.上述伸缩装置131可以是任意可以实现伸缩功能的机构,如液压缸、气压缸、电动推杆等。进一步的,伸缩装置131选用液压缸。
56.需要说明的是,外部动力系统可以是用于轮履切换式变体轮10行走机构的动力系统,如车轴传动系统、驱动马达、电机等。
57.具体的,本发明的轮履切换机构13可以设置为均匀分布的三个,在切换为履带式状态时,三个轮履切换机构13将可变形履带12支撑为外形为等边三边形的履带式结构。
58.如图7
‑
图9所示,可伸缩履带驱动机构133至少包括有一履带驱动轮1331和一伸缩传动轴组件1332。履带驱动轮1331设于可变形履带12内侧并与可变形履带12的履带齿(图中未示出)啮合实现传动连接,伸缩传动轴组件1332则贯穿支架132并与履带驱动轮1331传动连接,伸缩传动轴组件1332具有伸缩功能,进而通过伸缩功能可以在伸缩装置131伸缩时实现同步伸缩,进而不影响伸缩传动轴组件1332对履带驱动轮1331的传动效果。
59.如图8所示,为保证伸缩传动轴组件1332在伸缩的同时不影响传动,伸缩传动轴组件1332包括由上外花键轴133211和下内花键轴133212组成的花键轴13321,所述上外花键轴133211设置有上传动齿轮1332111,所述履带驱动轮1331的轮轴上设置有从动齿轮13311,从动齿轮13311与上传动齿轮1332111啮合,所述下内花键轴133212贯穿轮辋11后设置有下传动齿轮1332121。花键轴13321由上外花键轴133211和下内花键轴133212插接并啮
合组成,具体的,上外花键轴133211下端设置有外花键,下内花键轴133212上端向内凹陷形成连接孔,连接孔的孔壁上设置有内花键,外花键插入连接孔内并与内花键啮合,实现花键轴13321整体结构的插接和传动,从而通过下传动齿轮1332121与外部动力系统传动连接,带动花键轴13321、其上的上传动齿轮1332111转动,进而带动从动齿轮13311、同轴的履带驱动轮1331传动,可变形履带12即可在履带驱动轮1331驱使下转动,实现履带式状态下的轮履切换式变体轮10转动。
60.具体的,上外花键轴133211和下内花键轴133212均设置有轴向定位台阶133213,轴向定位台阶133213分别定位于支架132和轮辋11内。轴向定位台阶133213分别将上外花键轴133211和下内花键轴133212轴向定位于支架132和轮辋11内,从而在上外花键轴133211和下内花键轴133212伸缩时不会轴向(即图8中竖直方向)移位,保证下传动齿轮1332121、上传动齿轮1332111均可与外部动力系统、从动齿轮13311实现永久传动连接关系。进一步的,轴向定位台阶133213可以是设置于上外花键轴133211上端外侧和下内花键轴133212下端外侧的圆形台阶,圆形台阶可转动的定位于支架132和轮辋11内,进而轴向定位上外花键轴133211和下内花键轴133212而不影响二者转动传动。进一步的,轴向定位台阶133213定位处的支架132和轮辋11均设置有轴承,轴向定位台阶133213安装于轴承上,从而辅助上外花键轴133211和下内花键轴133212转动。
61.具体的,上传动齿轮1332111、从动齿轮13311、下传动齿轮1332121均为锥齿轮。锥齿轮可以实现传动系统不同轴的传动需求,可以很好的实现可伸缩履带驱动机构133的传动,传动效果好。
62.为保证轮履切换式变体轮10状态切换更为彻底和准确,花键轴13321的最大伸缩长度大于或等于伸缩装置131的最大伸缩长度。伸缩装置131通过伸缩长度改变可变形履带12的外形,因此伸缩装置131的长度需要满足状态切换的长度,花键轴13321的最大伸缩长度大于或等于伸缩装置131的最大伸缩长度,即不会影响伸缩装置131的伸缩,保证状态切换的正常进行,并且还能避免花键轴13321长度过短而受力,挤压和破坏整个伸缩传动轴组件1332,并能避免传动失效。进一步的,花键轴13321并排平行设置于伸缩装置131的内侧,从而可以利用伸缩装置131遮挡花键轴13321,避免外部杂物如碎石、沙土等进入下内花键轴133212的上部连接孔内,避免影响花键轴13321轴向伸缩,极好的保护了花键轴13321的无障碍伸缩和传动。
63.如图7所示,可变形保持架134设置有两个,两个可变形保持架134的一端均与支架132铰接,所述可伸缩履带驱动机构133位于两个可变形保持架134之间,所述可变形保持架134上均设置有辅助滚轮1341且可变形保持架134外侧为弧形,所述可变形保持架134内侧则与连接件135铰接。
64.具体的,两个可变形保持架134间隔设置,二者之间留有供二者传动错位的间隙,二者相邻端端部与支架132通过转动轴、销等铰接,进而在支架132随伸缩装置131伸缩而升降时,带动两个可变形保持架134转动,同时为了支撑可变形保持架134和限定可变形保持架134转动轨迹,两个可变形保持架134内侧则与连接件135铰接,从而在支架132和连接件135共同作用下形成在伸缩装置131伸缩带动下,按照特定轨迹运动的可变形结构,进而可以改变可变形履带12外形形成轮式或履带式,并起到很好支撑效果,为了保证可变形履带12的转动效果,减少其转动阻力,可变形保持架134上还间隔设置有若干辅助滚轮1341,辅
助滚轮1341与可变形履带12内侧贴合辅助转动,而为了进一步保证可变形履带12的状态切换彻底程度,并保证可变形履带12在轮式或履带式状态下的外侧轮面平滑过渡,可变形保持架134外侧也即其与可变形履带12内侧面贴合的一侧设置成弧形。进一步的,可变形保持架134可由两个相同结构的片状架体通过辅助滚轮1341连为一体。进一步的,可变形保持架134内侧向外凸出形成一转动连接部1342,转动连接部1342通过转轴、销等与连接件135铰接。
65.如图10所示,在具体结构上,可变形保持架134与支架132铰接的一端为首端,可变形保持架134另一端则为末端,辅助滚轮1341从末端向首端间隔排布设置于可变形保持架134上且位于同一圆弧线d1上,保证辅助滚轮1341转动受力方向一致。进一步的,任意相邻两个辅助滚轮1341与所述同一圆弧线d1的圆心形成的圆心角α均相等,圆心角α为10
°
~15
°
。进一步的,圆心角α为13
°
。
66.具体的,可变形保持架134外侧圆弧d2的半径大于所述同一圆弧线d1的半径,且可变形保持架134外侧圆弧d2沿末端向首端半径逐渐缩小直至与所述同一圆弧线d1相交,从而可使可变形履带12在可变形保持架134支撑处形成切向转动力,保证可变形履带12在可变形保持架134支撑处的转向和转动,减少应力集中带来的可变形履带12转动打滑、卡塞等问题,并最大化减少可变形保持架134尺寸,减少可变形保持架134变形所需空间。进一步的,可变形保持架134外侧圆弧d2的最大半径为所述同一圆弧线d1半径的1.05~1.1倍。
67.具体的,设首端与支架132铰接处的转轴中线为a,转动连接部1342的转轴中线为b,可变形保持架134上最末端的辅助滚轮1341的转轴中线为c,则:
68.转轴中线a和转轴中线c分别与转轴中线b的连线形成的夹角β为145
°
~155
°
。从而在结合可变形保持架134外侧圆弧d2的设计基础上,使得可变形保持架134在转动过程中能更加省力,增大连接件135转动扭矩,并且也能使连接件135能更多的承受可变形履带12的压力,及履带驱动轮1331、一伸缩传动轴组件1332、支架132的重力,避免伸缩装置131承受较大力而变形或损坏,同时,在夹角β限制下,可变形保持架134在转动时单位时间内转动角更小,转动更为连续和平滑,不会出现突然大转角转动,转动更为稳定,也能满足伸缩装置131持续稳定伸缩和履带驱动轮1331的稳定传动。进一步的,夹角β为152
°
。
69.同时,转轴中线a和转轴中线b之间的水平间距l、转轴中线b沿所述同一圆弧线d1的半径方向到可变形保持架134外侧圆弧面的距离h、转轴中线b与转轴中线c的距离k的长度比满足:l:h:k=1.8~1.88:1:1.6~1.65。l、h、k如果长度无法满足一定比关系,会导致伸缩装置131伸缩时可变形保持架134转角较小,使得伸缩装置131与支架132连接处、可变形保持架134与支架132连接处应力过大,连接处极易造成断裂问题,并且在可变形保持架134转动改变可变形履带12外形时,无法保证所有辅助滚轮1341均能与可变形履带12接触,致使可变形履带12出现部分位置凹陷或凸出,导致可变形履带12状态切换不彻底,影响其正常使用,因此本发明限定l、h、k的长度比值,即可解决上述问题,同时,在此基础上,当我们限定l、h、k的长度比值后,可变形保持架134转动时扭矩增大,伸缩装置131伸缩更为顺畅,并可减少伸缩装置131的受力,同时使得连接件135倾斜,不仅能承受部分力,可利用伸缩装置131和连接件135共同受力进行可变形保持架134支撑,起到均匀支撑的目的,还能利用连接件135倾斜支撑反向支撑力,进而利用伸缩装置131及位于伸缩装置131外侧的连接件135形成大范围轴向发散的多方向均匀支撑力,保证可变形保持架134受力均匀且两侧支
撑力充足,使得可变形履带12能平稳保持状态,并且能圆周均匀支撑,保持状态所需外形,进一步保障可变形履带12状态切换的彻底性。
70.请继续参见图7,连接件135为带有若干通槽1351的薄片结构,所述连接片135一侧设有用于轮辋错位的错位缺口1352,所述连接片135的两端均形成有带轴孔的连接部1353,连接部1353通过轴孔配合分别与可变形保持架134和轮辋11转动连接。连接件135用于限定可变形保持架134的转动轨迹,并对其起支撑作用,因此,在满足强度条件下,连接件135可以选用碳钢、合金钢等高强度金属制成,为减轻连接件135重量,连接件135可设计成薄片状,并设置若干通槽1351减重,为不影响其小范围转动,还可在连接片135一侧设用于轮辋错位的错位缺口1352。
71.支架132用于支撑、连接可变形保持架134和履带驱动轮1331,支架132上部至少设置与可变形保持架134和履带驱动轮1331配合的轴孔,支架132内可形成一空腔作为齿轮箱,将上传动齿轮1332111、从动齿轮13311保护在内。
72.请继续参见图7,为了保证履带驱动轮1331的稳定性,支架132还可包括一伸缩支撑杆1321,履带驱动轮1331一侧的转轴与可变形保持架134轴孔配合,在履带驱动轮1331另一侧的转轴则转动连接该伸缩支撑杆1321,从而通过可变形保持架134和伸缩支撑杆1321对履带驱动轮1331起到平稳支撑。具体的,伸缩支撑杆1321与伸缩装置131并排平行设置于履带驱动轮1331转轴的两侧,且伸缩支撑杆1321下端固定于轮辋11上。进一步的,伸缩支撑杆1321伸缩长度大于或等于伸缩装置131伸缩长度。进一步的,伸缩支撑杆1321可以采用内设弹性件(压簧)的套筒结构,也可以采用与伸缩装置131相同的液压缸、气压缸、电动推杆等伸缩机构。
73.如图11、图12所示,作为本发明的第二个实施例,本发明公开了一种轮履切换式驱动行走机构20,其包括驱动电机201和上述的轮履切换式变体轮10。本发明驱动电机201作为外部动力系统对轮履切换式变体轮10提供轮式或履带式状态的动力供应,轮履切换式变体轮10使用时根据需要切换成轮式或履带式,在实现状态稳定快速切换的同时实现动力切换。
74.如图13所示,所述驱动电机201内部设有离合装置,所述驱动电机201的输出端设置有行星减速器202,行星减速器202包括大齿圈2021、行星轮2022及行星架2023,大齿圈2021与轮辋11内轮毂固定连接,大齿圈2021内侧通过行星轮2022连接行星架2023,所述驱动电机201的输出轴上设置有主动齿轮2011,主动齿轮2011与行星架2023固连并与所述下传动齿轮1332121啮合。需要说明的是,当下传动齿轮1332121采用锥齿轮时,主动齿轮2011同样采用锥齿轮与其啮合。
75.在使用时,该轮履切换式驱动行走机构20可通过轮履切换式驱动行走机构的轮履切换方法30实现轮履切换和传动切换。
76.如图14所示,轮履切换式驱动行走机构的轮履切换方法30至少包括以下两大步骤:
77.301轮式切换步骤
78.伸缩装置131收缩,带动可变形保持架134转动,驱使可变形履带12变形形成圆形,此时离合装置约束行星架2023使其停止转动,驱动电机201的动力由输出轴经行星轮2022传递至大齿圈2021,通过大齿圈2021带动轮辋11转动,完成轮式状态和传动切换;
79.302履带式换步骤
80.伸缩装置131伸出,带动可变形保持架134转动,驱使可变形履带12变形形成多边形,此时离合装置约束大齿圈2021使其停止转动,释放行星架2023带动主动齿轮2011转动,主动齿轮2011通过啮合的下传动齿轮1332121带动履带驱动轮1331转动,履带驱动轮1331则驱动可变形履带12转动,完成履带式状态和传动切换。
81.所述轮履切换式驱动行走机构的轮履切换方法30,通过步骤301和步骤302,即可实现轮履切换式驱动行走机构20的状态切换和动力切换,具有切换稳定快速的特点。需要说明的是,步骤301和步骤302没有前后顺序之分,其执行步骤取决于当前轮履切换式驱动行走机构20所处的状态。
82.作为本发明的第三个实施例,本发明公开了一种多轴无人作战平台40,该多轴无人作战平台40位于前轴和后轴之间的一个或多个车轴上设置有上述的轮履切换式变体轮10或上述的轮履切换式驱动行走机构20。
83.本实施例的多轴无人作战平台40,由于采用了轮履切换式变体轮10或上述的轮履切换式驱动行走机构20,其具有更好的路况适应能力和越障、越壕能力,可根据需要彻底切换轮履切换式变体轮10或轮履切换式驱动行走机构20外形,具有切换快速稳定、传动平稳连续的特点。
84.以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1