一种磁吸附爬壁机器人的制作方法
1.本实用新型涉及工业用机器人技术领域,具体是一种磁吸附爬壁机器人。
背景技术:
2.石油化工行业是国民经济中的重要基础和支柱产业,各类储罐设备是石油石化行业生产系统中重要的基础设备。各类储罐在生产运行过程中,罐体内外壁会受到外界环境中潮湿空气和罐体内部存储介质的侵蚀,从而导致储罐内外壁腐蚀现象的产生。同时随着储罐使用时间的增加,储罐本体防腐层老化严重,破损脱落现象日益增加,加剧了罐体的大气腐蚀,降低了储罐的机械强度和安全性能。为了提高储罐的使用寿命,需对其定期进行除锈防腐作业,现有的除锈防腐作业方式主要有人工作业和机械作业两种方式。
3.传统的人工作业除锈防腐,需搭设脚手架施工,施工准备时间长,存在高处作业安全隐患;自动化程度低,劳动强度大,施工效率低,施工周期长;产生的固废对环境和操作人员身体健康有影响。
4.现有的机械作业方式按照执行机构的不同可大体分为手持式、推车式和爬壁机器人三种。其中爬壁机器人是目前的发展方向,按照吸附方式不同可分为磁力吸附和真空吸附两种,按照除锈方式可分为本体自带水射流除锈和可更换搭载平台两种。目前现有爬壁机器人普遍存在非结构环境适应能力弱、 负载小、灵活性差、除锈作业面单一等问题,这种仅以爬壁机器人为载体的除锈机器人只能清除石化储罐壁面大面积锈层的清洁,而不能清除边角、 喷淋管、加强圈、以及靠近旋梯等狭窄区域的锈层的清理。
5.通过检索与现有专利技术对比如下:
6.首先,一种四面打磨工业机器人,专利号:201810874433.8,包括t形底板,其特征是:所述t形底板的上侧一端固定有支撑轴,所述支撑轴的上侧铰接u形杆的一端,所述u形杆的另一端螺纹连接顶块一,所述t形底板上侧相对的两端分别通过l形支架固定连接t形槽杆的横杆两端,所述t形槽杆的横杆上设置有t形滑轨,所述t形滑轨内设置有t形滑块一,所述t形滑块一的一侧中部固定有圆柱杆一,所述圆柱杆一穿过所述t形滑轨、直槽杆的下端滑槽一和h形槽杆的上端卡槽。本发明涉及工业设备领域,具体地讲,涉及四面打磨工业机器人。本装置能够实现同时对工件的四面打磨。本发明虽然同时对工件的四面打磨,但不能实现爬金属罐体,不能完成高空罐体除锈、防腐作业。
7.其次,一种壁面行走机构及爬墙机器人,专利号:201711368592.2,所述行走机构包括:底座;运动机构,所述运动机构设置在所述底座上,所述运动机构包括驱动装置和吸盘,所述吸盘为多个,且多个所述吸盘间隔设置在所述驱动装置上,所述驱动装置驱动所述吸盘产生位移,且每一所述吸盘的位移轨迹形成闭合曲线;所述闭合曲线具有直线段、弧形段和连接段,所述直线段两端分别通过所述连接段与所述弧形段两端连接。本发明在直线运动状态下,多个吸盘连接组件吸附在壁面上,保证了其稳定性,而且通过类似履带的传动方式,使连续行走速度快,而且,通过设置弧形段,使本发明在转向时,可以更加灵活,提高了跨障能力。本发明采用吸盘结构,通过吸盘反复交体行走,但运行速度慢,无机械臂,不能
进行对罐体进行除锈、刷漆作业。
8.第三,一种爬墙多功能机器人,专利号:200710075780.6,包括工作主机、抽真空泵、主控制器、电磁阀组,尤其是工作主机驱动12条机械腿,每条机械腿的前端设置有真空吸盘,每个真空吸盘的盘内设置有气压传感器,各气压传感器连接a/d转换器,由主控制器判定12个真空吸盘中有至少10只能够工作在吸附状态后,则驱动机械腿进行爬行作业,并在爬行过程中根据操作指令驱动前工作机械臂进行操作。本发明靠真空吸盘吸附在墙壁,靠机械腿下部的吸盘交替行走,同样无机械臂,不能进行对罐体进行除锈、刷漆作业。
9.第四,一种用于清洗船舶的爬壁机器人,专利号:202011394390.7,包括本体架、轮毂电机式行走轮、吸盘组件以及支撑轮组件;轮毂电机式行走轮分别位于吸盘组件的两侧。该爬壁机器人中,通过喷盘磁铁组与后端小磁铁吸附在船体钢板壁面上。喷枪将高压水流通过喷头组的喷嘴喷射出,打击在船体表面的钢板上,完成船体的清洗或除漆除锈。本发明轮毂电机式行走轮为轮毂和电机一体化结构形式的行走轮,不需要另外单独设置驱动行走轮行走的电机,实现单侧单轮的结构设计形式,简化行走端结构形式,但无机械臂,不能对结构复杂的罐体进行除锈、刷漆作业。
技术实现要素:
10.本实用新型的目的就是针对现有技术存在的不足,提供一种磁吸附爬壁机器人,满足石油石化行业储罐防腐除锈、喷漆作业需要。
11.上述目的是通过下述技术方案实效的:
12.本实用新型的一种磁吸附爬壁机器人,包括:车体、驱动机构、磁力轮、驱动电机、连接板、机械臂、作业支座、旋转电机、安装板、底板、供电电源和接收控制电路及无线控制遥控器:其特征是:所述车体的底部设置有驱动机构,所述驱动机构包括磁力轮和驱动电机,驱动机构通过连接板固定在车体的底部;所述底板固定在车体的上部左端,所述底板上安装有旋转电机,所述旋转电机的下部设有安装板,安装板与机械臂的首端连接,所述机械臂的末端安装有作业支座,所述供电电源与接收控制电路连接,接收控制电路为旋转电机和驱动电机提供动力;所述无线控制遥控器上设有旋转电机正反转控制按钮、驱动电机前、后、左、右按钮。
13.进一步的,所述车体为长方体形。
14.进一步的,所述磁力轮为强磁人造磁钢。
15.进一步的,所述驱动电机为电压220v,功率为750w交流伺服电机。
16.进一步的,驱动机构设有四组,为四驱机构,分别设在车体的底部四个角上。
17.进一步的,所述旋转电机为电压220v,功率为750w交流伺服电机,通过安装板带动机械臂360
°
旋转正、反旋转。
18.进一步的,所述配电柜内设有接收控制电路,接收控制电路分别与驱动电机、旋转电机电连接。
19.进一步的,所述无线控制遥控器上部设有旋转电机的正转、反转按钮;下部设有控制驱动电机的前、后、左、右按钮。
20.本实用新型的有益效果是:
21.一种磁吸附爬壁机器人能通过磁力轮吸附在金属罐体表面,驱动电机与磁力轮组
合形成驱动机构,爬壁机器人通过驱动机构对车体进行驱动,手持无线控制遥控器可以控制驱动机构的运动方向,车体能够向需要作业的位置进行移动。通过在爬壁机器人本体上设置的机械臂作业支座上安装除锈或防腐作业工具,可以实现对金属罐体表面的除锈、防腐作业,避免了脚手架搭设造成的安全风险隐患,消除了高处作业安全隐患,实现了除锈防腐、作业的自动化,降低了作业人员的劳动强度,提高了施工效率和质量,同时减轻了作业过程中产生的废液、废渣对作业人员的影响,保障了作业人员的身体健康。
附图说明
22.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,而且在整个附图中,用相同的参考符号表示相同的部件,附图仅用于示出优选实施方式的目的,而并不认为是对本实用新型的限制,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,通过优选实施方式的详细描述,各种其他的优点和益处对于本领域普通技术人员将变得清楚明了,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
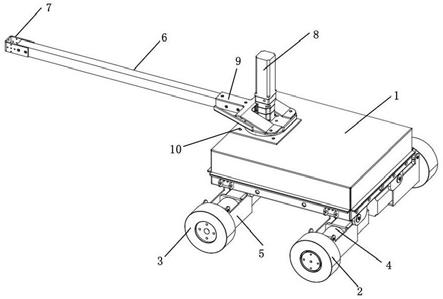
23.图1为本实用新型轴侧结构示意图
24.附图中所示标号:车体1、驱动机构2、磁力轮3、驱动电机4、连接板5、机械臂6、作业支座7、旋转电机8、安装板9、底板10。
具体实施方式
25.以下结合附图对本实用新型的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本实用新型,并不用于限定本实用新型。此外应理解,在参阅了本实用新型的内容之后,本领域技术人员可以对本实用新型作各种改动或修改,这些等价形式同样落于本技术所限定的范围。
26.参照图1,本实用新型提供一种磁吸附爬壁机器人,包括:车体1、驱动机构2、磁力轮3、驱动电机4、连接板5、机械臂6、作业支座7、旋转电机8、安装板9、底板10、电源和接收控制电路及手持无线遥控器:其特征是:所述车体1的底部设置有驱动机构2,所述驱动机构2包括磁力轮3和驱动电机4,驱动机构2通过连接板5固定在车体1的底部;所述底板10固定在车体1的上部左端,所述底板10上安装有旋转电机8,所述旋转电机8的下部设有安装板9,安装板9与机械臂6的首端连接,所述机械臂6的末端安装有作业支座7,作业支座7用于固定安装各种除锈、防腐工具等。
27.具体的,所述车体1为长方体形,内设电源、接收控制电路。
28.具体的,所述磁力轮3为强磁人造磁钢。
29.具体的,所述驱动电机4为电压220v,功率750w交流伺服电机。
30.具体的,驱动机构2设有四组,为四驱机构,分别设在车体1的底部四个角上。
31.具体的,所述旋转电机8为电压220v,功率750w交流伺服电机,通过安装板9带动机械臂6 360
°
旋转正、反旋转,实现对金属表面的除锈、防腐等作业。
32.具体的,所述配电柜内设有接收控制电路,接收控制电路分别与驱动电机4、旋转电机8电连接。
33.具体的,所述手持无线遥控器上部设有旋转电机8的正转、反转按钮;下部设有控
制驱动电机4的前、后、左、右按钮。
34.在使用磁吸附爬壁机器人对金属储罐进行除锈、防腐作业时,首先,将作业工具如水砂射流清洗喷枪或喷漆枪安装固定在作业支座7上。其次,将车体1通过磁力轮3吸附在金属罐体壁面上。第三,将配电柜电源的电源线通过航空插头与一种磁吸附爬壁机器人车体上部预留的电源接口相连接,通过手持无线遥控器可以使车体1在驱动机构2的驱动下行走,手持无线遥控器下部设有的前、后、左、右按钮可以控制车体1的行进方向。同时手持无线遥控器上部设有的正转、反转按钮可以控制旋转电机8的旋转方向,机械臂6通过旋转电机8的作用可以实现左、右自由摆动,同时带动作业支座7上安装固定的水砂射流清洗喷枪或喷漆枪,对金属储罐表面进行水喷砂除锈、喷漆作业,从而实现了金属储罐除锈、喷漆作业的自动化,降低了人工作业强度,提高了施工质量和效率;同时有效防止除锈、喷漆作业中产生的废渣、废液对人员的影响,从而保障了作业人员的身体健康;整个作业过程由于采用了爬壁机器人作业,免除了作业准备环节中的脚手架搭设,消除了高处作业安全隐患。
35.最后应说明的是:以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1