一种空间正交网格化菱面体滚动机器人的制作方法
1.本实用新型属于工业机械技术领域,特别涉及一种空间正交网格化菱面体滚动机器人。
背景技术:
2.应急救援一般是指针对突发、具有破坏力的紧急事件采取预防、预备、响应和恢复的活动与计划。根据紧急事件的不同类型,分为卫生应急、交通应急、消防应急、地震应急、厂矿应急、家庭应急等领域的应急救援。应急救援是对紧急事件做出的控制紧急事件发生与扩大的工作,开展有效救援,减少损失和迅速组织恢复正常状态,处理突发性和后果与影响严重的公共安全事故、灾害与事件。近几年,灾难频频发生,给人民群众的生命和财产带来了严重的损失,复杂危险的灾害现场给救援人员和幸存者带来了巨大的安全威胁,也会阻碍救援工作快速有效的进行,利用救援机器人进行辅助搜救可以搜救工作更加安全、高效,目前使用的救援机器人的行走机构较庞大,对现场的移动适应能力较差。
技术实现要素:
3.为了解决现有技术中存在的问题,本实用新型提供一种新的空间正交网格化菱面体滚动机器人。
4.本实用新型具体技术方案如下:
5.本实用新型提供一种空间正交网格化菱面体滚动机器人,包括六个井字形铰接平面机构组成的空心六面体;各所述井字形铰接平面机构均包括两平行设置的横杆以及连在两所述横杆上且均与所述横杆垂直设置的两个纵杆,两所述横杆与两所述纵杆之间分别通过转动副连接,相邻两井字形铰接平面机构的横杆或纵杆之间均通过转动件连接,且至少三个相邻的井字形铰接平面机构上设有电机;各所述横杆和各所述纵杆均由多个杆件铰接而成,且空心六面体内设有驱动组件,所述驱动组件驱动至少一所述转动副在所在的平面上向外伸展,伸展后的各横杆和各纵杆形成类球形结构。
6.进一步地改进,所述驱动组件包括驱动平台、多个连杆以及多个推杆电机,各所述连杆的一端分别设于所述驱动平台上,另一端分别连接在井字形铰接平面机构上,各所述推杆电机分别通过球铰组件设于所述驱动平台的六个端面上,且所述驱动平台的每个端面上设有至少两个推杆连接,设于同一端面的两个推杆电机的输出轴分别连接在对应井字形铰接平面机构,且分别连接在两个相对设置的横杆与纵杆的连接处。
7.进一步地改进,所述连杆由多个管径依次递减的管件相互套接而成,相互套接的两管件中的外管内壁上相对设有两滑槽,内管外壁上设有与所述滑槽配合滑动的滑块。
8.进一步地改进,各所述球铰组件均包括驱动板、球铰底座以及球形铰接头,所述驱动板连接在所述驱动平台的端面上,所述球铰底座设于所述驱动板上,所述球形铰接头设于所述球铰底座内,所述推杆电机连接在所述球形铰接头上。
9.进一步地改进,所述驱动平台的各端面上均设有至少两个滑道,所述驱动板设于
相对应的滑道内并沿所述滑道的长度方向滑动,且所述滑道的底部设有限制所述驱动板滑动的限位组件。
10.进一步地改进,所述限位组件包括设于所述滑道底部且沿所述滑道的长度方向间隔设置的多个限位槽、设于所述驱动板一侧壁上的滑槽、设于所述滑槽内的限位板,所述限位板与所述限位槽相对卡止,且所述滑槽内远离所述滑道的一端连接有伸缩气缸。
11.进一步地改进,所述转动件包括多个连接板、两转动块、两转动轴以及球铰接头,各所述连接板分别设于相邻两井字形铰接平面机构的横杆端部或纵杆端部,且设于分别设于横杆端部的上下侧壁上或纵杆端部的上下侧壁上,所述转动块设于上下相对设置的两连接杆之间,两所述转动轴的一端分别转动连接在两所述转动块上,另一端通过球铰接头连接。
12.进一步地改进,所述转动副为转轴,所述转轴的一端固定连接在横杆上,另一端与纵杆转动连接。
13.进一步地改进,所述转轴上连接有设于空心六面体内部的齿轮,所述齿轮上啮合有圆锥齿轮,所述圆锥齿轮设于所述电机的输出轴上,且所述电机连接在井字形铰接平面机构的其中一横杆的内壁上。
14.进一步地改进,相邻两杆件之间通过铰接件连接,所述铰接件包括第一铰接构件、第二铰接构件以及铰接轴,所述第二铰接构件的一端设于所述第一铰接构件的开口内,所述铰接轴依次穿过第一铰接构件的一端、第二铰接构件以及第一铰接构件而定另一端,所述第一铰接构件远离开口的一端与相邻两杆件中的其中一杆件连接,所述第二铰接构件的另一端连接另一杆件。
15.本实用新型的有益效果如下:
16.本实用新型提供一种新的空间正交网格化菱面体滚动机器人,该空间正交网格化菱面体滚动机器人采用六个井字形平面机构形成组成的空心六面体,不仅可以直行还可以斜行,同时采用驱动组件可以驱动六面体的各边向外伸展,形成的类球形结构在行驶时的适应能力更强,更加的灵活,便于探测、救援等任务的进行。
附图说明
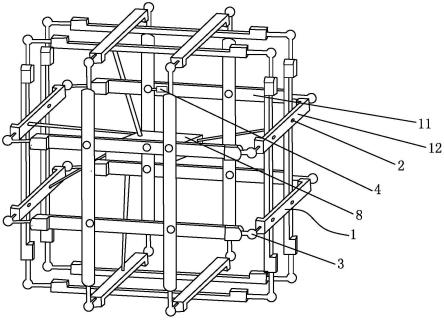
17.图1为本实用新型空间正交网格化菱面体滚动机器人的结构示意图;
18.图2为本实用新型空间正交网格化菱面体滚动机器人变形后的示意图;
19.图3为本实用新型空间正交网格化菱面体滚动机器人去掉上下端面时的俯视图;
20.图4为本实用新型连杆的剖视图;
21.图5为本实用新型驱动组件的侧视图;
22.图6为本实用新型转动件的结构示意图;
23.图7为本实用新型电机的安装示意图;
24.图8为本实用新型铰接件的结构示意图。
具体实施方式
25.下面结合附图和以下实施例对本实用新型作进一步详细说明。
26.本实用新型提供一种空间正交网格化菱面体滚动机器人,如图1 所示,包括六个
井字形铰接平面机构1组成的空心六面体;各所述井字形铰接平面机构1均包括两平行设置的横杆11以及连在两所述横杆11上且均与所述横杆11垂直设置的两个纵杆12,两所述横杆11与两所述纵杆12之间分别通过转动副2连接,相邻两井字形铰接平面机构1的横杆11或纵杆12之间均通过转动件3连接,且至少三个相邻的井字形铰接平面机构1上设有电机4;各所述横杆11和各所述纵杆12均由多个杆5铰接而成,且空心六面体内设有驱动组件8,所述驱动组件 8驱动至少一所述转动副2在所在的平面上向外伸展,伸展后的各横杆 11和各纵杆12形成类球形结构。
27.本实用新型提供一种新的空间正交网格化菱面体滚动机器人,该空间正交网格化菱面体滚动机器人采用六个井字形平面机构形成组成的空心六面体,不仅可以直行还可以斜行,同时采用驱动组件可以驱动六面体的各边向外伸展,形成的类球形结构在行驶时的适应能力更强,更加的灵活,便于探测、救援等任务的进行。
28.本实施例中采用驱动组件驱动各杆件或者调节杆向外伸展,由于各杆件或者各调节杆之间通过铰接轴铰接,因此,该滚动机构变形为类球形时需要驱动连接各杆件或者各调节杆的铰接轴转动到最大角度,而变形恢复到六面体形状时,只需将驱动组件调回原位即可;且转动副设于在组成横杆或者纵杆的杆件上,且设有转动副的杆件在变形时只会平行移动,而转动副两侧的杆件完成变形的过程。
29.电机设置之至少三个,设置三个时,需要设置在三个相邻的面上,可以直线行驶,可以斜向行驶,还可以侦察隐蔽,当该机构在平面上行驶时,可以转换为空心的球体,如图2所示。
30.该机器人作为救援机器人的行走机构,用于应急救援,在组成机器人时,可以在驱动组件上安装驱动电路板,所述驱动电路板电连接设于所述驱动组件上的驱动电源、360度可旋转的摄像头、温湿度传感器以及生命探测仪;所述驱动电源为所述驱动电路板、摄像头、温湿度传感器以及生命探测仪供电,该机构进入灾后现场后,温湿度传感器实时监测灾后现场的环境参数,摄像头讲拍摄的画面通过驱动电路板传输给远程控制终端,同时,生命探测仪探测生命信号,并通过驱动电路板将信号传输给远程控制终端,远程控制终端通过的分析综合信息控制电机以及驱动组件的运转,进而控制机器人的行走以及变形
31.优选的,如图3所示,本实施例中所述驱动组件8包括驱动平台 81、多个连杆82以及多个推杆电机83,各所述连杆82的一端分别设于所述驱动平台81上,另一端分别连接在井字形铰接平面机构1上,各所述推杆电机83分别通过球铰组件84设于所述驱动平台81的六个端面上,且所述驱动平台81的每个端面上设有至少两个推杆连接,设于同一端面的两个推杆电机83的输出轴分别连接在对应井字形铰接平面机构1,且分别连接在两个相对设置的横杆11与纵杆12的连接处。
32.优选的,如图4所示,本实施例中所述连杆82由多个管径依次递减的管件821相互套接而成,相互套接的两管件821中的外管内壁上相对设有两第一滑槽822,内管外壁上设有与所述第一滑槽822配合滑动的滑块823。
33.优选的,如图5所示,本实施例中各所述球铰组件84均包括驱动板841、球铰底座842以及球形铰接头843,所述驱动板841连接在所述驱动平台81的端面上,所述球铰底座842设于所述驱动板841上,所述球形铰接头843设于所述球铰底座842内,所述推杆电机83连接在所述球形铰接头843上。
34.优选的,如图3、图5所示,本实施例中所述驱动平台81的各端面上均设有至少两个滑道85,所述驱动板841设于相对应的滑道85 内并沿所述滑道85的长度方向滑动,且所述滑道85的底部设有限制所述驱动板841滑动的限位组件86。
35.优选的,如图5所示,本实施例中所述限位组件86包括设于所述滑道85底部且沿所述滑道85的长度方向间隔设置的多个限位槽861、设于所述驱动板841一侧壁上的第二滑槽864、设于所述滑槽内的限位板862,所述限位板862与所述限位槽861相对卡止,且所述第二滑槽 864内远离所述滑道85的一端连接有伸缩气缸863。
36.设置驱动组件用于将井字形平面结构变形为空心的球体其中,驱动平台通过连杆连接在六面体内,推杆电机(在该滚动机构为六面体时,推杆电机的推动杆需要设于电机的壳体内部,在驱动变形时再伸出驱动,该设置可以保证所述滚动机构变形为六面体时推杆电机的推动杆回到壳体内部后各杆件可以回到原位)设于驱动平台上,用于推动横杆与纵杆的交叉处的中心位置,且电机在驱动平台上需要滑动,如与左端面对应的电机分别驱动平台的上下端面,与右端面对应的电机分别驱动平台的下、上端面,保证电机在左右方向的滑动,进而保证该机构直走或者斜走的顺利进行;设置滑道是为了便于电机的滑动,而限位组件是为了避免在井字形平面结构与空心的球体互变时产生的反作用力导致的电机滑动,进而影响机构的变形;当电机不需要移动时,启动气缸,气缸的伸缩带动连板向下滑动,直至连板深入凹槽内与凹槽对应卡止;由于六面体会行走时会变形,所以电机需要通过球形铰接头随着六面体的形变而转动,从而实现机构的行走;连杆与驱动平台之间可以铰接,便于探测作业的进行。
37.优选的,如图6所示,本实施例中所述转动件3包括多个连接板 301、两转动块302、两转动轴303以及球铰接头304,各所述连接板 301分别设于相邻两井字形铰接平面机构1的横杆11端部或纵杆12端部,且设于分别设于横杆11端部的上下侧壁上或纵杆12端部的上下侧壁上,所述转动块302设于上下相对设置的两连接杆之间,两所述转动轴303的一端分别转动连接在两所述转动块302上,另一端通过球铰接头304连接。通过转动块、转动轴以及球铰接头可以实现横杆在x轴以及z轴方向的转动,实现纵轴在y轴以及z轴方向的转动,更有利于空心六面体的行走以及变形,且行走以及变形的过程互不影响。
38.优选的,本实施例中所述转动副2为转轴,所述转轴的一端固定连接在横杆11上,另一端与纵杆12转动连接。转动副可以是转轴,还可以采用别的可以实现转动的结构。
39.优选的,如图7所示,本实施例中所述转轴上连接有设于空心六面体内部的齿轮7,所述齿轮上啮合有圆锥齿轮6,所述圆锥齿轮6设于所述电机4的输出轴上,且所述电机4连接在井字形铰接平面机构1 的其中一横杆11的内壁上。电机上连接锥齿轮,通过锥齿轮与齿轮的啮合带动转轴的转动,进而带动横杆的转动,从而实现机器人的行走;该设置使得驱动更加方便,且电机的安装更加适应该机器人的行走、作业等。
40.优选的,如图8所示,本实施例中相邻两杆5之间通过铰接件9 连接,所述铰接件9包括第一铰接构件901、第二铰接构件902以及铰接轴903,所述第二铰接构件902的一端设于所述第一铰接构件901 的开口内,所述铰接轴903依次穿过第一铰接构件901的一端、第二铰接构件902以及第一铰接构件901而定另一端,所述第一铰接构件 901远离开口的一端与相邻两杆5中的其中一杆5连接,所述第二铰接构件902的另一端连接另一杆5。相邻两杆件之间通过铰接件连接,该装置可以使得平台或者纵杆可以灵活变形。
41.本实用新型中的其余结构均可以采用螺栓或者螺钉连接。
42.以上所述实施例仅仅是本实用新型的优选实施方式进行描述,并非对本实用新型的范围进行限定,在不脱离本实用新型设计精神的前提下,本领域普通技术人员对本实用新型的技术方案作出的各种变形和改进,均应落入本实用新型的权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1