一种仿袋鼠跳跃腿机构
1.本实用新型属于机器人领域,涉及仿生机器人,具体涉及一种仿袋鼠跳跃腿机构。
背景技术:
2.随着科学技术的发展,出现了各式各样的仿生弹跳机器人。相比较轮式机器人、履带式机器人,弹跳机器人具有活动范围广,移动效率高且灵活性强等特点。在自然界中,弹跳是一种非常常见的运动。在所有跳跃行动物中,袋鼠具有跳跃速度快、跳跃远度大等特点,而且还具有较高的灵活性。
技术实现要素:
3.为解决现有技术中存在的问题,本实用新型的目的是提供一种仿袋鼠跳跃腿机构,可以实现弹跳角度调整、弹跳高度调整、连续跳跃和自动复位的功能,并能实现仿袋鼠弹跳的弹跳腿机构,并且能在复杂的环境下应用。
4.为了实现上述目的,本实用新型采用如下技术方案:
5.一种仿袋鼠跳跃腿机构,包括机体、第一小腿、第二小腿、第一大腿不完全齿轮、第二大腿不完全齿轮、轴、第一齿轮、第二齿轮、第三齿轮和不完全齿轮,轴转动连接于机体上,第一大腿不完全齿轮和第二大腿不完全齿轮分别转动连接于轴的两端,第一大腿不完全齿轮和第二大腿不完全齿轮位于机体的外部,第一大腿不完全齿轮的下端和第二大腿不完全齿轮的下端分别连接有第一弹性元件和第二弹性元件,第一小腿的上端和第二小腿的上端分别与第一弹性元件和第二弹性元件连接,轴的两端分别绕设有第一绳索和第二绳索,第一绳索的一端和第二绳索的一端分别与第一弹性元件和第二弹性元件连接,第一绳索和第二绳索均呈张紧状态;第一齿轮同轴固定安装在轴上,不完全齿轮与第一齿轮啮合连接,不完全齿轮连接于用于驱动其转动的第一驱动机构上;第二齿轮和第三齿轮分别与第一大腿不完全齿轮和第二大腿不完全齿轮啮合连接;第二齿轮和第三齿轮分别连接于用于驱动它们转动的第二驱动机构和第三驱动机构上。
6.优选的,第一弹性元件和第二弹性元件均采用顶部向下弯曲的弧形弹片,第一大腿不完全齿轮与弧形弹片的两端分别通过螺栓固定连接,第二大腿不完全齿轮与弧形弹片的两端分别通过螺栓固定连接。
7.优选的,第一大腿不完全齿轮和第二大腿不完全齿轮上在弧形弹片的上方向上开设有凹槽。
8.优选的,轴的两端分别设置有第一滚筒和第二滚筒,第一绳索和第二绳索分别绕设于第一滚筒和第二滚筒上。
9.优选的,第一小腿的上端通过第一小腿固定板和螺栓与第一弹性元件固定连接;
10.第二小腿的上端通过第二小腿固定板和螺栓与第二弹性元件固定连接;
11.第一绳索的一端和第二绳索分别与第一小腿固定板和第二小腿固定板连接。
12.优选的,第一小腿和第二小腿的形状均采用v形,第一小腿两边的夹角和第二小腿
两边的夹角均为钝角。
13.优选的,第一绳索的一端和第二绳索均采用钢绳。
14.优选的,第一驱动机构、第二驱动机构和第三驱动机构均采用电机,第一驱动机构、第二驱动机构和第三驱动机均安装在所述机体上。
15.优选的,本实用新型仿袋鼠跳跃腿机构还包括电源,电源与第一驱动机构、第二驱动机构和第三驱动机构连接。
16.与现有技术相比,本实用新型具有以下技术效果:
17.本实用新型仿袋鼠跳跃腿,在弹跳机构中采用弹性元件,更具灵活性,可随时更换。在复杂的环境下,该机构不仅能实现弹跳动作,还可实现行走功能。并且对弹跳角度、高度都可进行控制。
附图说明
18.构成本技术的一部分的说明书附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
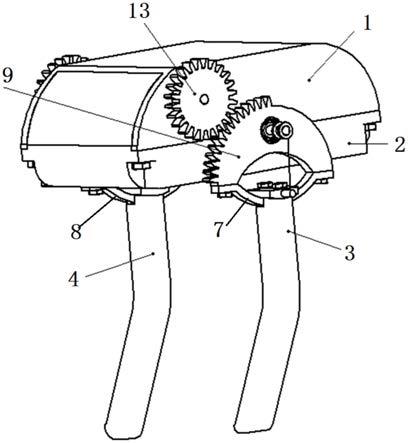
19.图1为本实用新型整体结构立体图。
20.图2为本实用新型中弹跳腿结构立体图。
21.图3为本实用新型中内部结构立体图。
22.图中各个代号:1-上机体,2-下机体,3-第一小腿,4-第二小腿,5-第一小腿固定板,7-第一弹性元件,8-第二弹性元件,9-第一大腿不完全齿轮,10-第二大腿不完全齿轮,11-轴,12-第一齿轮,13-第二齿轮,14-第三齿轮,15-不完全齿轮,16-第一电机,17-第二电机,18-第三电机,19-第一滚筒,20-第二滚筒,21-第一钢绳,23-电源。
具体实施方式
23.下面将参考附图并结合实施例来详细说明本实用新型。需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。
24.以下详细说明均是示例性的说明,旨在对本实用新型提供进一步的详细说明。除非另有指明,本实用新型所采用的所有技术术语与本技术所属领域的一般技术人员的通常理解的含义相同。本实用新型所使用的术语仅是为了描述具体实施方式,而并非意图限制根据本实用新型的示例性实施方式。
25.如图1-图3,本实用新型仿袋鼠跳跃腿机构,包括:第一电机16、第二电机17、第三电机18、第一小腿3、第二小腿4、第一弹性元件7、第二弹性元件8、第一大腿不完全齿轮9、第二大腿不完全齿轮10、第一滚筒19、第二滚筒20、第一钢绳21、第二钢绳、第一齿轮12、第二齿轮13、第三齿轮14、不完全齿轮15和轴11。其中,第一电机16、第二电机17、第三电机18固定在三个电机座上,三个电机座分别通过螺栓固定在机体上,不完全齿轮15、第二齿轮13、第三齿轮14分别固定在第一电机16、第二电机17和第三电机18的输出轴上;小腿(包括第一小腿和第二小腿)通过小腿固定板与弹性元件固定,弹性元件和大腿不完全齿轮通过螺钉固定;第一齿轮通过键槽和轴肩固定在轴上,并与不完全齿轮进行啮合,实现间歇运动;第二齿轮、三分别与两大腿不完全齿轮进行啮合传动,实现对弹跳角度、弹跳高度的控制。
26.本实用新型的一个具体实施例中,第一电机通过螺栓固定在下机体上,不完全第一齿轮固定在第一电机的输出轴上。第一齿轮通过键槽和轴肩固定在轴上,第一齿轮与不完全齿轮进行啮合传动。轴通过两个轴承固定在机体上。轴的两端分别固定第一滚筒、第二滚筒,钢绳的一端连接在滚筒上,另一端与小腿连接板的销轴连接。小腿固定板通过螺钉将弹性元件和小腿连接起来。在实现弹跳动作时,第一电机带动不完全齿轮转动,当不完全齿轮和第一齿轮啮合后,不完全齿轮带动第一齿轮转动。第一齿轮固定在轴上,轴通过旋转带动第一滚筒、二上的钢绳运动,从而使第一弹性元件、二发生变形,进行储存能量。当第一电机带动不完全齿轮转动到无齿的位置后,不完全齿轮和第一齿轮脱离啮合状态,弹性元件为恢复弹性,释放弹性势能,实现弹跳动作。当不完全齿轮和第一齿轮再次啮合后,进而实现连续的弹跳动作。当第二电机带动第二齿轮转动,第一大腿不完全齿轮和第二齿轮进行啮合,第三电机带动第三齿轮转动,大腿不完全齿轮和第三齿轮进行啮合,可实现在弹跳前对弹跳角度、高度的控制。
27.在实用新型的一个具体实施例中,第二电机、三固定在电机座上,电机座通过螺栓与上机体固定。第二齿轮、三分别通过键槽和卡环固定在第二电机、三的输出轴上。第一大腿不完全齿轮、二分别通过轴承固定在轴的两侧。第二电机、三分别带动第二齿轮、三转动时,第一大腿不完全齿轮、二和第二齿轮、三啮合。当分别控制第二电机、三进行运动时,可控制两侧弹跳腿分别进行动作,实现机构的行走功能。
28.如图1所示,图中,上机体1和下机体2用四个螺栓相连,第二齿轮13和第一大腿不完全齿轮9相啮合,第一大腿不完全齿轮9和第一弹性元件7用两个螺栓相连,第一小腿3和第一小腿固定板5用两个螺栓相连,其整体用螺钉与第一弹性元件7相连。
29.如图2所示,第二齿轮13、第三齿轮14分别固定在第二电机17、第三电机18的输出轴上,第二电机17、第三电机18的输出轴通过轴承与上机体1相连,第一齿轮12通过轴肩和键固定在轴11上,第一滚筒19、第二滚筒20分别固定在轴11的两端,第一钢绳21的两端分别连接在第一滚筒19和第一小腿固定板5上,第二钢绳的两端分别连接在第二滚筒20和第二小腿固定板上,第一大腿不完全齿轮9和第二大腿不完全齿轮10分别通过轴承与轴11相连接,第一电机16通过螺栓固定在下机体2上,不完全齿轮15固定在第一电机16的输出轴上,并与第一齿轮12相啮合。
30.如图3所示,电源23固定在下机体2上,轴11上的两个轴承分别由上机体1和下机体2固定,第一大腿不完全齿轮9和第二大腿不完全齿轮10对称布置在轴11的两侧。
31.该仿袋鼠跳跃机构的工作原理:
32.1、实现仿袋鼠跳跃运动。仿袋鼠跳跃的每个周期分为四个阶段:弹跳准备阶段、起跳阶段、空中阶段和落地阶段。
33.弹跳准备阶段,第一电机16带动不完全齿轮15转动,不完全齿轮的有齿部分与第一齿轮12啮合传动,第一齿轮12经轴11带动第一滚筒19、第二滚筒20转动,第一钢绳21、第二钢绳缠绕在第一滚筒19、第二滚筒20上,拉动第一弹性元件7、第二弹性元件8使之变形,产生弹性形变,储存弹性势能。第二电机17、第三电机18带动第二齿轮13、第三齿轮14正转,整个机体向前倾斜,调整其起跳的高度、角度,准备起跳;起跳阶段,不完全齿轮15与第一齿轮12脱离啮合状态,弹性元件势能被释放,逐渐恢复原状,弹性势能转化为机械能,跳跃机构获得初速度离开地面,完成起跳阶段;空中阶段,第二电机17、第三电机18带动第二齿轮
13、第三齿轮14反转,使小腿完成落地角度调整,第一电机16带动不完全齿轮15与第一齿轮12再次啮合,储存能量,完成空中阶段;落地阶段,第二电机17、第三电机18带动第二齿轮13、第三齿轮14正转,不完全齿轮15与第一齿轮12再次脱离啮合,释放弹性势能,完成跳跃的一个周期。
34.2、实现行走运动。第二电机17带动第二齿轮13反转,第一大腿不完全齿轮9正转,带动第一小腿3向前运动;第三电机18带动齿轮14反转,第二大腿不完全齿轮10正转,带动第二小腿4向前运动,完成一个行走周期。将两组仿袋鼠跳跃腿机构安装在机器人上,可实现对角足步伐,即对角线上的两条腿为一个整体,每走一个周期,两组对角足依次运动,实现行走。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1