一种巡检机器人控制系统的制作方法
1.本发明属于巡检机器人技术领域,特别涉及一种巡检机器人控制系统。
背景技术:
2.随着中国铁路建设的快速发展,列车高速、高密度的运行,对铁路电务、供电设备及系统的安全和运维管理提出了更严格的要求,高铁车站、中继站、基站的通信机械室、信号机械室、电力变配电所的日常巡检分为有人值守和无人值守两种方式,以上地点大多存在交通不便、夜间巡检作业困难等问题,造成巡检人员不可能实时掌握设备运行工况,易出现监测盲区,而市面上的巡检机器人可以长时间进行巡检,避免检测盲区以及监测空窗期的产生。目前,公告号为cn212828769u的中国专利,公开了一种巡检机器人,包括车体、主动轮、万向轮和支架;主动轮和万向轮安装在车体上;支架安装在车体上;主动轮给予巡检机器人动力以使巡检机器人移动,万向轮用于调节巡检机器人的移动方向,可以实现较小半径的转弯操作,主动轮和万向轮与地面之间没有干摩擦,可以实现定位精度的提升和轮胎使用寿命的延长。现有的巡检机器人不止在室内进行工作,在室外作业的时候有可能因为大风或是人为碰撞导致倾倒,没有人工扶起的话无法立起,而且室外在有积雪或是较小的杂质堆积的时候可能会影响轮式巡检机器人的正常巡检。
技术实现要素:
3.本发明的目的在于针对现有的一种巡检机器人控制系统,其优点是在因为外力倾倒后可以自动立起,而且可以在产生积雪或是杂质的时候可以将其推开避免阻挡行进。本发明的上述技术目的是通过以下技术方案得以实现的:包括轮式机器人载具和巡检控制系统,所述轮式机器人载具的顶部设置有升降电机驱动结构,所述轮式机器人载具的顶部转动连接有折叠式升降结构,所述折叠式升降结构的外侧与升降电机驱动结构栓接,所述折叠式升降结构的顶部栓接有高精度二自由度双光云台,所述轮式机器人载具的顶部栓接有三维激光雷达,所述轮式机器人载具的底部栓接有轮系驱动结构,所述轮式机器人载具的外侧栓接有轮系转向结构,所述轮式机器人载具的左侧栓接有防跌落传感器,所述高精度二自由度双光云台的后侧栓接有高清摄像机,所述高精度二自由度双光云台的前侧栓接有红外摄像机,所述轮式机器人载具的左侧和右侧均设置自立组件,所述自立组件的右侧栓接有推动组件,所述轮式机器人载具的左侧设置有底铲组件。采用上述技术方案,通过设置轮式机器人载具,用于对结构进行支撑,设置的巡检控制系统用于对设备中的结构进行控制,设置的升降电机驱动结构用于和折叠式升降结构配合,对其进行驱动,设置的高精度二自由度双光云台用于对红外摄像机和高清摄像机进行安装并且可以便于对其进行活动以调控拍摄角度,设置的轮系驱动结构和轮系转向结构用于让轮式机器人可以在巡检控制系统的控制下进行行进,设置的自立组件可以配合推动
组件在装置自身倾倒的时候可以自动立起,设置的底铲组件可以在积雪或是杂质较多的位置进行行进道路的清理。本发明进一步设置为:所述巡检控制系统包括中央控制模块,所述中央控制模块的输入端双向电性连接有声光告警模块,所述中央控制模块的输出端单项电性连接有云台模块,所述中央控制模块的输出端单向电性连接有运动控制模块,所述中央控制模块的输出端单向电性连接有自立模块,所述中央控制模块的输出端单向电性连接有折叠式升降模块,所述中央控制模块的输出端双向电性连接有数据采集模块,所述中央控制模块的输出端双向电性连接有远程数据传输模块,所述中央控制模块的输入端单向电性连接有防跌落模块。采用上述技术方案,通过设置的声光告警模块用于提醒周边人员或是收集音频,设置的云台模块可以与折叠式升降模块对视讯信息的采集进行位置的调整,设置的中央控制模块用于对整个结构进行控制,设置的运动控制模块控制装置进行移动,设置的数据采集模块用于收集视讯信息供给系统用于判断之后的行为,设置的远程数据传输模块用于在远程对装置进行控制和监控,并且可以便于收集数据或是输入信息,设置的防跌落模块用于收集信息避免装置行进在落差过大的位置导致摔落。本发明进一步设置为:本发明进一步设置为:所述声光告警模块包括应急广播模块、声音采集模块和报警灯模块,所述应急广播模块为扩音喇叭,所述报警灯模块为闪光报警灯,所述扩音喇叭设置在轮式机器人载具的内侧。采用上述技术方案,通过设置扩音喇叭作为应急广播模块,便于在远程对音频进行播放,设置的报警灯模块用于警示周边人员。本发明进一步设置为:所述数据采集模块包括环境监测模块、红外测温模块和视频监视模块,所述环境监测模块为三位激光雷达,所述红外测温模块包括红外摄像机,所述视频监视模块为高清摄像机,所述声音采集模块为采集麦克风,采集麦克风设置在轮式机器人载具的内侧。采用上述技术方案,通过设置作为环境监测模块的三位激光雷达,可以有效的对周边环境信息进行采集,作为红外测温模块的红外摄像机可以便于对温度进行监控,并且在夜晚也可以起到采集的效果,作为视频监视模块的高清摄像机用于对常规视频信息进行传输,设置的声音采集模块用于对周边声音进行收集。本发明进一步设置为:所述云台模块为高精度二自由度双光云台,所述运动控制模块为轮系驱动结构,所述自立模块为自立组件和推动组件,所述折叠式升降模块为折叠式升降结构,所述防跌落模块为防跌落传感器。采用上述技术方案,通过设置作为云台模块的高精度二自由度双光云台,可以灵活的对高清摄像机和红外摄像机进行角度调整,设置作为折叠式升降模块的折叠式升降结构,可以便于对云台模块进行高度和位置的调整,作为作为防跌落模块的防跌落传感器,可以对进行位置的高度落差进行感应,避免摔落。本发明进一步设置为:所述自立组件包括环形导轨,所述环形导轨的外侧滑动连接有安装外壳,所述环形导轨的内侧栓接有齿条,所述齿条的右侧啮合连接有齿轮,所述安装外壳内侧的顶部栓接有驱动马达,所述驱动马达的输出轴端部与齿轮栓接。采用上述技术方案,通过设置环形导轨,作为安装外壳和内部结构的活动导向轨
道,使用的时候驱动马达带动齿轮转动,齿轮和齿条啮合,随着齿轮的转动,安装外壳以及外部结构会沿着环形导轨进行滑动。本发明进一步设置为:所述推动组件包括导向外壳,所述导向外壳左侧的顶部与安装外壳栓接,所述导向外壳内侧的底部栓接有驱动电机,所述驱动电机的输出轴端部栓接有驱动螺杆,所述导向外壳的顶部栓接有顶板,所述顶板的底部与驱动螺杆转动连接,所述驱动螺杆的表面螺纹连接有驱动板,所述驱动板的外侧与导向外壳滑动连接,所述驱动板的顶部倒角处焊接有连杆,所述连杆的顶部焊接有推动板,所述连杆的外侧贯穿顶板并与顶板滑动连接。采用上述技术方案,通过设置驱动电机,在带动驱动螺杆转动的时候,驱动螺杆外侧的驱动板会沿着导向外壳垂直移动,并且通过连杆带动推动板垂直移动,在装置摔倒的时候,自立组件的安装外壳将推动组件移动到摔倒的一侧,推动板从导向外壳内部伸出的时候会抵压倾倒位置的地面,并且将装置顶起。本发明进一步设置为:左侧所述环形导轨的右侧栓接有包围架,所述包围架靠近轮式机器人载具的一侧与轮式机器人载具栓接,右侧所述环形导轨的左侧栓接有连接架,所述连接架靠近轮式机器人载具的一侧与轮式机器人载具栓接。采用上述技术方案,通过设置包围架和连接架配合,便于将自立组件和轮式机器人载具进行连接,并且不妨碍其他结构的使用。本发明进一步设置为:所述底铲组件包括受力架,所述受力架的右侧与右侧所述环形导轨的左侧栓接,所述受力架左侧的顶部栓接有电动伸缩缸,所述电动伸缩缸的左侧设置有铲板,所述受力架左侧的底部栓接有连杆,所述连杆的左侧与铲板转动连接。采用上述技术方案,通过设置受力架,可以便于将底铲组件安装在环形导轨上,设置的连杆用于对铲板进行支撑,设置的电动伸缩缸用于对铲板进行立起或是放平,避免在不需要推动杂质的时候影响装置上下坡。本发明进一步设置为:所述电动伸缩缸的伸缩轴端部栓接有第一转轴,所述第一转轴的左侧转动连接有滑块,所述滑块的外侧滑动连接有滑轨,所述滑轨的左侧与铲板栓接,所述连杆的左侧栓接有第二转轴,所述转轴的左侧与铲板转动连接。采用上述技术方案,通过设置第一转轴和滑块以及滑轨配合,在电动伸缩缸回缩或是伸长的时候,电动伸缩缸的端部通过第一转轴拉动或是推动滑块在滑轨中滑动,设置的第二转轴可以在铲板活动的时候沿着第二转轴转动。综上所述,本发明具有以下有益效果:1、通过设置声光告警模块用于提醒周边人员或是收集音频,设置的云台模块可以与折叠式升降模块对视讯信息的采集进行位置的调整,设置的中央控制模块用于对整个结构进行控制,设置的运动控制模块控制装置进行移动,设置的数据采集模块用于收集视讯信息供给系统用于判断之后的行为,设置的远程数据传输模块用于在远程对装置进行控制和监控,并且可以便于收集数据或是输入信息,设置的防跌落模块用于收集信息避免装置行进在落差过大的位置导致摔落,设置的自立组件用于在装置摔倒后自动立起,自立组件中的环形导轨,作为安装外壳和内部结构的活动导向轨道,使用的时候驱动马达带动齿轮转动,使其和齿条啮合,齿轮转动时安装外壳以及外部结构会沿着环形导轨进行滑动,驱动电机带动驱动螺杆转动,驱动螺杆外侧的驱动板会沿着导向外壳垂直移动,并且通过连杆
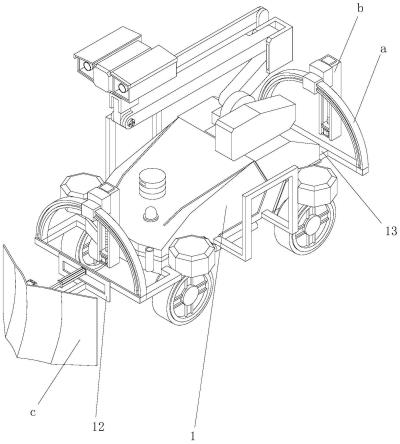
的顶部栓接有高精度二自由度双光云台5,轮式机器人载具1的顶部栓接有三维激光雷达,轮式机器人载具1的底部栓接有轮系驱动结构 7,轮式机器人载具1的外侧栓接有轮系转向结构8,轮式机器人载具1的左侧栓接有防跌落传感器9,高精度二自由度双光云台5的后侧栓接有高清摄像机10,高精度二自由度双光云台5的前侧栓接有红外摄像机11,轮式机器人载具1的左侧和右侧均设置自立组件a,自立组件a的右侧栓接有推动组件b,通过设置轮式机器人载具1,用于对结构进行支撑,设置的巡检控制系统2用于对设备中的结构进行控制,设置的升降电机驱动结构3用于和折叠式升降结构4配合,对其进行驱动,设置的高精度二自由度双光云台5用于对红外摄像机 11和高清摄像机10进行安装并且可以便于对其进行活动以调控拍摄角度,设置的轮系驱动结构7和轮系转向结构8用于让轮式机器人可以在巡检控制系统2的控制下进行行进,设置的自立组件a可以配合推动组件b在装置自身倾倒的时候可以自动立起,巡检控制系统2 包括中央控制模块201,中央控制模块201的输入端双向电性连接有声光告警模块202,中央控制模块201的输出端单项电性连接有云台模块203,中央控制模块201的输出端单向电性连接有运动控制模块 204,中央控制模块201的输出端单向电性连接有自立模块205,中央控制模块201的输出端单向电性连接有折叠式升降模块206,中央控制模块201的输出端双向电性连接有数据采集模块207,中央控制模块201的输出端双向电性连接有远程数据传输模块208,中央控制模块201的输入端单向电性连接有防跌落模块209,通过设置的声光告警模块202用于提醒周边人员或是收集音频,设置的云台模块203 可以与折叠式升降模块206对视讯信息的采集进行位置的调整,设置的中央控制模块201用于对整个结构进行控制,设置的运动控制模块204控制装置进行移动,设置的数据采集模块207用于收集视讯信息供给系统用于判断之后的行为,设置的远程数据传输模块208 用于在远程对装置进行控制和监控,并且可以便于收集数据或是输入信息,设置的防跌落模块209用于收集信息避免装置行进在落差过大的位置导致摔落,声光告警模块202包括应急广播模块2021和报警灯模块2022,应急广播模块2021为扩音喇叭,报警灯模块2022 为闪光报警灯,扩音喇叭设置在轮式机器人载具1的内侧,通过设置扩音喇叭作为应急广播模块2021,便于在远程对音频进行播放,设置的报警灯模块2022用于警示周边人员,数据采集模块207包括环境监测模块2071、红外测温模块2072、视频监视模块2073和声音采集模块2074,环境监测模块2071为三位激光雷达6,红外测温模块2072包括红外摄像机11,视频监视模块2073为高清摄像机10,通过设置作为环境监测模块2071的三位激光雷达6,可以有效的对周边环境信息进行采集,作为红外测温模块2072的红外摄像机11 可以便于对温度进行监控,并且在夜晚也可以起到采集的效果,声音采集模块2074为采集麦克风,采集麦克风设置在轮式机器人载具1 的内侧,设置的声音采集模块2074用于对周边声音进行收集,作为红外测温模块2072的红外摄像机11可以便于对温度进行监控,并且在夜晚也可以起到采集的效果,作为视频监视模块2073的高清摄像机10用于对常规视频信息进行传输,云台模块203为高精度二自由度双光云台5,运动控制模块204为轮系驱动结构7,自立模块205 为自立组件a和推动组件b,折叠式升降模块206为折叠式升降结构 4,防跌落模块209为防跌落传感器9,通过设置作为云台模块203 的高精度二自由度双光云台5,可以灵活的对高清摄像机10和红外摄像机11进行角度调整,设置作为折叠式升降模块206的折叠式升降结构4,可以便于对云台模块203进行高度和位置的调整,作为作为防跌落模块209的防跌落传感器9,可以对进行位置的高度落差进行感应,避免摔落,自立组件a包括环形导轨a1,
环形导轨a1的外侧滑动连接有安装外壳a2,环形导轨a1的内侧栓接有齿条a3,齿条a3的右侧啮合连接有齿轮a4,安装外壳a2内侧的顶部栓接有驱动马达a5,驱动马达a5的输出轴端部与齿轮a4栓接,通过设置环形导轨a1,作为安装外壳a2和内部结构的活动导向轨道,使用的时候驱动马达a5带动齿轮a4转动,齿轮a4和齿条a3啮合,随着齿轮a4的转动,安装外壳a2以及外部结构会沿着环形导轨a1进行滑动,推动组件b包括导向外壳b1,导向外壳b1左侧的顶部与安装外壳a2栓接,导向外壳b1内侧的底部栓接有驱动电机b2,驱动电机 b2的输出轴端部栓接有驱动螺杆b3,导向外壳b1的顶部栓接有顶板b4,顶板b4的底部与驱动螺杆b3转动连接,驱动螺杆b3的表面螺纹连接有驱动板b5,驱动板b5的外侧与导向外壳b1滑动连接,驱动板b5的顶部倒角处焊接有连杆c4b6,连杆c4b6的顶部焊接有推动板b7,连杆c4b6的外侧贯穿顶板b4并与顶板b4滑动连接,通过设置驱动电机b2,在带动驱动螺杆b3转动的时候,驱动螺杆 b3外侧的驱动板b5会沿着导向外壳b1垂直移动,并且通过连杆 c4b6带动推动板b7垂直移动,在装置摔倒的时候,自立组件a的安装外壳a2将推动组件b移动到摔倒的一侧,推动板b7从导向外壳 b1内部伸出的时候会抵压倾倒位置的地面,并且将装置顶起,左侧环形导轨a1的右侧栓接有包围架12,包围架12靠近轮式机器人载具1的一侧与轮式机器人载具1栓接,右侧环形导轨a1的左侧栓接有连接架13,连接架13靠近轮式机器人载具1的一侧与轮式机器人载具1栓接,通过设置包围架12和连接架13配合,便于将自立组件a和轮式机器人载具1进行连接,并且不妨碍其他结构的使用。使用过程简述:通过设置声光告警模块202用于提醒周边人员或是收集音频,设置的云台模块203可以与折叠式升降模块206对视讯信息的采集进行位置的调整,设置的中央控制模块201用于对整个结构进行控制,设置的运动控制模块204控制装置进行移动,设置的数据采集模块207用于收集视讯信息供给系统用于判断之后的行为,设置的远程数据传输模块208用于在远程对装置进行控制和监控,并且可以便于收集数据或是输入信息,设置的防跌落模块 209用于收集信息避免装置行进在落差过大的位置导致摔落,设置的自立组件a用于在装置摔倒后自动立起,自立组件a中的环形导轨 a1,作为安装外壳a2和内部结构的活动导向轨道,使用的时候驱动马达a5带动齿轮a4转动,使其和齿条a3啮合,齿轮a4转动时安装外壳a2以及外部结构会沿着环形导轨a1进行滑动,驱动电机b2 带动驱动螺杆b3转动,驱动螺杆b3外侧的驱动板b5会沿着导向外壳b1垂直移动,并且通过连杆c4b6带动推动板b7垂直移动,在装置摔倒的时候,自立组件a的安装外壳a2将推动组件b移动到摔倒的一侧,推动板b7从导向外壳b1内部伸出的时候会抵压倾倒位置的地面,以将装置顶起,轮式机器人载具1对结构进行安装,设置的巡检控制系统2用于对设备中的结构进行控制,设置的升降电机驱动结构3用于和折叠式升降结构4配合,对其进行驱动,设置的高精度二自由度双光云台5用于对红外摄像机11和高清摄像机10进行安装并且可以便于对其进行活动以调控拍摄角度,设置的轮系驱动结构 7和轮系转向结构8用于让轮式机器人载具1可以在巡检控制系统2 的控制下进行行进。实施例:参考图1-4,一种巡检机器人控制系统,包括轮式机器人载具1,轮式机器人载具1的左侧设置有底铲组件c,底铲组件c包括受力架 c1,受力架c1的右侧与右侧环形导轨a1的左侧栓接,受力架c1左侧的顶部栓接有电动伸缩缸c2,电动伸缩缸c2的左侧设置有铲板 c3,受力架c1左侧的底部栓接有连杆c4b6,连杆c4b6的左侧与铲板c3转动连接,通过设置受
力架c1,可以便于将底铲组件c安装在环形导轨a1上,设置的连杆c4b6用于对铲板c3进行支撑,设置的电动伸缩缸c2用于对铲板c3进行立起或是放平,避免在不需要推动杂质的时候影响装置上下坡,电动伸缩缸c2的伸缩轴端部栓接有第一转轴14,第一转轴14的左侧转动连接有滑块15,滑块15的外侧滑动连接有滑轨16,滑轨16的左侧与铲板c3栓接,连杆c4b6的左侧栓接有第二转轴17,转轴的左侧与铲板c3转动连接,通过设置第一转轴14和滑块15以及滑轨16配合,在电动伸缩缸c2回缩或是伸长的时候,电动伸缩缸c2的端部通过第一转轴14拉动或是推动滑块15在滑轨16中滑动,设置的第二转轴17可以在铲板c3活动的时候沿着第二转轴17转动。使用过程简述:通过设置推动组件b,便于对行进的位置进行清理,设置的受力架c1,可以将底铲组件c安装在环形导轨a1上,设置的连杆c4b6用于对铲板c3进行支撑,设置的电动伸缩缸c2用于对铲板c3进行立起或是放平,在电动伸缩缸c2回缩或是伸长的时候,电动伸缩缸c2的端部通过第一转轴14拉动或是推动滑块15在滑轨 16中滑动,起到调整铲板c3的效果,避免在不需要推动杂质的时候影响装置上下坡。本具体实施例仅仅是对本发明的解释,其并不是对本发明的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本发明的权利要求范围内都受到专利法的保护。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1