爬行机器人的工作头的制作方法
[0001]
本实用新型涉及爬行机器人的技术领域,尤其是涉及一种爬行机器人的工作头。
背景技术:
[0002]
近半个世纪以来,中国在船舶工业方面取得了辉煌的发展,船舶建造、修理和贸易都取得了辉煌成就,船舶工业随之在国民经济中的地位也显著提高。但是,由于船舶外壁长期沉浸在海水中,船舶外壁会受海水的侵蚀,随着船舶使用时间的增加,船舶外壁不可避免的会发生锈蚀,为了提高船舶的使用寿命和增加船舶使用安全性,当船舶外壁锈蚀到一定的程度时必须进行除锈清洗,并重新喷涂涂料,以保护船舶外壁。
[0003]
公开号为cn107757841a的中国专利公开了一种基于高压水射流的船舶除锈自动爬壁机器人装置,主要包括外壳、轴环、真空管安装套口、入口导液盘、高压管支持套、高压管上套口、高压管下套口、铆钉、螺栓、高压管安装套口、弹性密封圈、t形导液管、电机支座、电机、链轮、链条、轮子、轴承、端盖、引流管、蒙盖、旋转扇叶、喷嘴、圆筒、永久磁铁和转轴。
[0004]
上述中的现有技术方案存在以下缺陷:爬壁机器人通过轮子在工作表面上行走时,外壳与工作表面之间会具有间隙,因此部分污水会从这个间隙中溢出,从而造成环境污染。
技术实现要素:
[0005]
针对现有技术存在的不足,本实用新型的目的是提供一种可以减少污水从壳体外缘与工作表面之间溢出的可能的爬行机器人的工作头。
[0006]
本实用新型的上述实用新型目的是通过以下技术方案得以实现的:一种爬行机器人的工作头,包括壳体以及设置在壳体周缘的若干支腿,所述支腿上设有与工作表面相抵触的轮子,所述工作头外壁沿周缘设置有环形的浮动环块,所述浮动环块上沿工作头周缘嵌置有若干磁铁。
[0007]
通过采用上述技术方案,工作头可以通过支腿以及支腿上的轮子在工作表面行走,此时磁铁对工作表面产生一个吸引力,从而驱动浮动环块向着工作表面略微形变,从而使得浮动环块与工作表面相接触,进而减少了壳体外缘与工作表面之间的间隙,以减少污水溢出的可能,并且磁铁沿工作头外壁周缘设置,浮动环块受力更加均匀,从而使得浮动环块均匀地贴向工作表面,保证各个部位的密封性。
[0008]
本实用新型在一较佳示例中可以进一步配置为:所述浮动环块外套设有密封圈。
[0009]
通过采用上述技术方案,密封圈的密封能力更强,设置在浮动环块外围,可以提高浮动坏块与工作表面之间的密封性,进一步减少污水溢出的可能;并且这样的连接方式使得密封圈与工作表面之间的压力较小,不会影响到工作头在工作表面上的正常活动。
[0010]
本实用新型在一较佳示例中可以进一步配置为:所述密封圈上穿设有若干定位螺栓,所述定位螺栓螺纹连接在浮动环块上。
[0011]
通过采用上述技术方案,定位螺栓可以对密封圈起到一个定位作用,从而将密封
圈整体稳定的连接在浮动环块上,减少密封圈局部翘起或弯曲的可能,以保证密封圈稳定、完整地贴合在工作表面上;并且这样的连接方式便于操作者随时更换密封圈。
[0012]
本实用新型在一较佳示例中可以进一步配置为:所述支腿与浮动环块之间设有缓冲弹簧,所述缓冲弹簧的两端分别连接在浮动环块和支腿上。
[0013]
通过采用上述技术方案,缓冲弹簧可以对浮动环块起到一个缓冲、减震的作用,从而减少浮动环块的震动和抖动,提高浮动环块的工作稳定性,进而稳定地对壳体和工作表面之间进行密封。
[0014]
本实用新型在一较佳示例中可以进一步配置为:所述支腿上设有导向杆,所述导向杆穿设在缓冲弹簧的内部。
[0015]
通过采用上述技术方案,导向杆可以对缓冲弹簧起到一个导向的作用,减少缓冲弹簧在工作时弯曲的可能,使得缓冲弹簧沿竖直方向稳定地对浮动环块进行缓冲、减震,提高浮动环块的稳定性。
[0016]
本实用新型在一较佳示例中可以进一步配置为:所述浮动环块背离壳体一侧的底部设有切面,所述切面的高点远离壳体。
[0017]
通过采用上述技术方案,切面的设置便于浮动环块越过工作表面上的不平整处,从而可以减少浮动环块撞击、卡死在工作表面不平处的可能,提高工作头对工作表面的适应能力。
[0018]
本实用新型在一较佳示例中可以进一步配置为:所述浮动环块上表面设有一圈凸环,所述凸环上开设有供磁铁嵌入的半导槽。
[0019]
通过采用上述技术方案,操作者将磁铁嵌置到浮动环块上时,可以先将磁铁抵触在半导槽的槽壁上,然后向下按压磁铁,从而快速便捷的完成安装;此时半导槽起到一个导向的作用,减少磁铁的安装难度,并且半导槽槽壁较高,可以对磁铁起到一个限位作用,减少磁铁在安装或工作过程中脱离浮动环块的可能。
[0020]
本实用新型在一较佳示例中可以进一步配置为:各个所述磁铁沿壳体周缘等分设置,各个所述定位螺栓分别位于相邻的两个磁铁之间。
[0021]
通过采用上述技术方案,定位螺栓与磁铁错位开来,可以减少磁铁对定位螺栓的吸引力,从而便于定位螺栓将密封圈稳定地固定在浮动环块上。
[0022]
综上所述,本实用新型包括以下至少一种有益技术效果:
[0023]
1.浮动环块与工作表面相接触,可以减少壳体外缘与工作表面之间的间隙,以减少污水溢出的可能;
[0024]
2.各个磁铁沿工作头外壁周缘设置,浮动环块受力更加均匀,从而使得浮动环块均匀地贴向工作表面,保证各个部位的密封性。
附图说明
[0025]
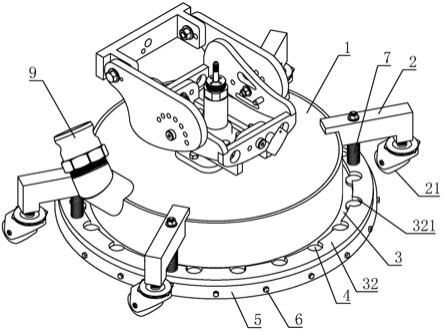
图1是本实施例的整体结构示意图。
[0026]
图2是本实施例用于体现切面的结构示意图。
[0027]
图中,1、壳体;2、支腿;21、轮子;3、浮动环块;31、切面;32、凸环;321、半导槽;33、嵌置槽;4、磁铁;5、密封圈;6、定位螺栓;7、缓冲弹簧;8、导向杆;9、吸风口。
具体实施方式
[0028]
以下结合附图对本实用新型作进一步详细说明。
[0029]
参照图1,为本实用新型公开的一种爬行机器人的工作头,包括圆盘形的壳体1以及设置在壳体1周缘的四个l形的支腿2,四个支腿2两两一组,两组支腿2分别设置在壳体1的两侧,支腿2上连接有轮子21,轮子21设置为万向轮,从而便于工作头在工作表面上灵活的走动。壳体1上设有一个吸风口9,以对壳体1内的污水进行吸收。
[0030]
参照图1,壳体1外壁沿周缘设置有环形的浮动环块3,浮动坏块由聚四氟乙烯制成,因此具有一定的弹性。浮动环块3上沿工作头周缘嵌置有圆形的磁铁4,磁铁4沿浮动环块3等分设置有二十个,浮动环块3上表面的外缘设有一圈凸环32,凸环32上开设有半导槽321,半导槽321设置为优弧形且与磁铁4外缘相匹配,浮动环块3上设有与半导槽321相通的嵌置槽33,操作者首先将磁铁4插入半导槽321内,然后向下压磁铁4,使得磁铁4顺着半导槽321向下移动并嵌入嵌置槽33内,从而快速便捷、稳定的将磁铁4嵌置在浮动环块3上。
[0031]
参照图1,浮动环块3外套设有密封圈5,密封圈5由橡胶制成,因此密封能力强。密封圈5上穿设有定位螺栓6,定位螺栓6螺纹连接在浮动环块3上,以将密封圈5固定在浮动环块3上。定位螺栓6沿浮动坏块的周缘等分设置有二十个,且各个定位螺栓6分别位于相邻的两个磁铁4中间,这样的设置可以减少磁铁4对定位螺栓6的吸引力,从而便于定位螺栓6将密封圈5稳定的固定在浮动环块3上。
[0032]
参照图1和图2,浮动环块3背离壳体1一侧的底部设有切面31,切面31的高点远离壳体1,切面31的倾斜角度可以设置为10
°
~30
°
,从而工作头在工作表面上行走、遇到不平整的表面时,浮动环块3可以通过切面31越过工作表面上的不平整处,以减少浮动环块3撞击、卡死在工作表面不平处的可能,提高工作头对工作表面的适应能力。
[0033]
参照图1和图2,支腿2与浮动环块3之间设有缓冲弹簧7,缓冲弹簧7的两端分别固定在支腿2和浮动环块3上,支腿2上螺纹连接有导向杆8,导向杆8穿设在缓冲弹簧7的内部。工作头在工作时,壳体1和浮动环块3会产生震动,此时缓冲弹簧7可以对浮动环块3起到一个缓冲、减震的作用,从而减少浮动环块3的震动和抖动,提高浮动环块3的工作稳定性,进而稳定的对壳体1和工作表面之间进行密封。导向杆8则可以对缓冲弹簧7的延伸方向起到一个导向作用,以使得缓冲弹簧7稳定的沿竖直方向对浮动环块3进行缓冲。
[0034]
本实施例的实施原理为:工作头在工作表面上行走、清洗时,磁铁4与工作表面相吸引,从而驱动浮动环块3向着工作表面略微形变,并且磁铁4沿工作头外壁周缘设置,浮动环块3受力更加均匀,从而使得浮动环块3均匀地贴向工作表面,保证各个部位的密封性。此时密封圈5与工作表面相接触,以减小壳体1与工作表面之间的间隙,在吸风口9的强大吸力下,可以快速的吸除污水,减少污水从壳体1与工作表面之间溢出的可能。
[0035]
本具体实施方式的实施例均为本实用新型的较佳实施例,并非依此限制本实用新型的保护范围,故:凡依本实用新型的结构、形状、原理所做的等效变化,均应涵盖于本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1