一种吸附式水下清洗机器人的制作方法
[0001]
本实用新型涉及水下船舶清洗领域,尤其涉及一种吸附式水下清洗机器人。
背景技术:
[0002]
船舶长时间工作在海洋环境下,会遭受到海水腐蚀以及海底海洋生物的附着。船体表面常常会附着难以清除的海洋生物。出现上述状况后船舶的行驶速度会显著地下降,油耗明显增多,使得船舶的运输成本提高。
[0003]
目前国内市场的水下清洗机器人还尚未成熟,发展的空间比较的大。清洗方式大多采用清洗刷盘清洗和空化射流清洗。但采用清洗刷盘清洗方式在清洗的时存在一些突出问题,比如不能适应船舶曲率面的清洗,清洗机器人在移动时清洗刷盘接触船舶表面时会产生较大的阻力。随着国内市场高压水射流技术发展日渐成熟,该项领域也运用到了水下清洗且有较好的发展空间,但目前还有很多关键技术仍迫切需要去解决。设计一款清洗效率高,清洗周期短的的水下清洗机器人,船舶无需上岸,在海岸码头或者近水岸就可以完成清洗船舶表面。
技术实现要素:
[0004]
本实用新型涉及一种吸附式水下清洗机器人,基于stm32单片机控制,采用空化射流清洗方式,整体结构设计为零浮力,采用履带传动方式和永磁体吸附在船舶表面实现水下机器人在船舶表面移动,控制部分采用模块化设计便于后期功能拓展,本清洗机器人的清洗效率高,清洗时间短,清洗费用低,能够实现清洗一定曲率的船舶表面,船舶不需要进坞可直接在海上或近水岸就可以完成清洗作业。
[0005]
为解决上述技术问题,本申请实施例提供一种吸附式水下清洗机器人,包括铅垂螺旋桨推进器、水密插头、步进电机、步进电机固定架、球头关节、球头轴承、控制舱、机器人框架、弹簧、空化射流旋转装置、履带、水平螺旋桨推进器、前置探照灯、空化射流喷头、后置探照灯、弹簧连接座、链轮支撑架、主动链轮、从动链轮1、链条、从动链轮2、前置高清摄像头、后置高清摄像头、浮力材、链轮轴、链轮轴承座1、链轮轴承座2,其特征在于,总控制系统采用stm32单片机,设计整体结构为零浮力,控制舱外壳上部以及四周开有螺纹孔用于安装水密插头,控制舱最顶端水密插头与水密缆连接,水密缆另外一段连接到上位机,通过安装在上位机上的操作手柄可以实现对于水下清洗机器人的实时控制,所述的球头关节与球头轴承的配合,可以实现履带贴合在船舶表面,所述的空化射流部分包括空化射流喷头、空化射流旋转装置以及岸上空化射流高压机组成,空化射流高压机产生高压水,通过高压水管输送到水下清洗机器人并由空化射流喷头喷出,其中高压水在经过空化射流旋转装置时,高压水冲动空化射流旋转轴上的叶片,可以实现空化射流喷头旋转,所述的履带的外表面为凹凸状,在履带的侧端面开有通孔,用于安装圆柱形永磁体块,履带移动时,永磁体也跟随履带移动,从而实现机器人本体吸附在船舶表面,履带的内侧面与链条连接,步进电机转动带动主动链轮转动,链轮带动链条移动,链条带动履带移动。
[0006]
作为本方案的优选实施例,所述的整体结构为零浮力是通过计算机计算机器人本体的重浮心,以及后期在机器人本体框架上安装铅块实现的。
[0007]
作为本方案的优选实施例,总控制系统采用stm32单片机,stm32单片机的芯片安装在控制舱的内部电路板,控制舱的外壳上安装有水密插头,水密插头与与铅垂螺旋桨推进器、水平螺旋桨推进器、前置探照灯、后置探照灯、前置高清摄像头、后置高清摄像头的水密揽插头通过水密缆连接,从而实现控制舱控制各个部分工作。
[0008]
作为本方案的优选实施例,所述的球头关节与球头轴承配合,链轮支撑架与球头关节通过螺纹连接,可以实现链轮支撑架绕着球头轴承左右摆动,受拉弹簧一端连接在弹簧连接座,另外一端连接在机器人本体框架上,当机器人行驶的船舶表面为平面时,机器人履带与机器人本体框架平行,当机器人行驶的船舶表面为曲面时,机器人履带与机器人本体框架成一定的角度。
[0009]
作为本方案的优选实施例,所述的水平螺旋桨推进器整体结构采用外八字造型,通过操作手柄将信号发送到上位机,上位机对下位机进行控制,可以实现水下清洗机器人本体前进,后退,左转,右转,原地左转,原地右转,左平移,右平移的功能。
[0010]
作为本方案的优选实施例,所述的推进器、探照灯以及摄像头外壳与对应的支撑座配合,通过在支撑座与外壳表面安装喉箍紧固在支撑座上,支撑座通过螺母螺钉连接安装在机器人本体框架上。
[0011]
本申请实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
[0012]
该水下清洗机器人的清洗效率高、清洗时间短、费用低,船舶不需要进坞可直接在海上或停泊地完成清洗作业。采用履带传动和悬架系统以及永磁体吸附更利于水下清洗机器人贴附在船舶表面,使得清洗机器人在船舶表面有较大的接触面积,能够对清洗路径进行有效地控制,清洗过程不留死角。空化射流清洗喷头整体设计为s型,清洗时空化射流喷头会绕着空化射流清洗轴旋转,清洗面积比较的大,采用模块化设计,后期拓展功能空间较大。在清洗过程中不会损坏船舶表面,可以实现对于一定曲率船舶表面的清洗。
附图说明
[0013]
为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0014]
图1是本申请实施例的俯视图。
[0015]
图2是本申请实施例的主视图。
[0016]
图3是本申请实施例的仰视图。
[0017]
图4是本申请实施例的左视图。
[0018]
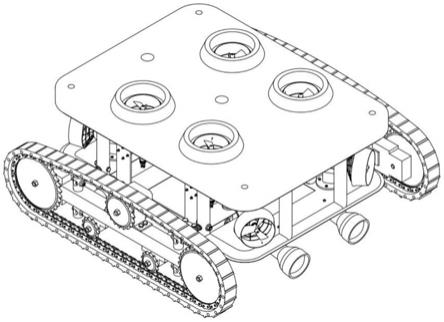
图5是本申请实施例的等轴测图。
[0019]
图1-图5中,1.铅垂螺旋桨推进器、2.水密插头、3.步进电机、4.步进电机固定架、5.球头关节、6.球头轴承、7.控制舱、8.机器人框架、9.弹簧、10. 空化射流旋转装置、11.履带、12.水平螺旋桨推进器、13.前置探照灯、14.空化射流喷头、15.后置探照灯、16.弹簧连接座、17.链轮支撑架、18.主动链轮、19. 从动链轮1、20.链条、21.从动链轮2、22.前置高清
摄像头、23.后置高清摄像头、24浮力材、25链轮轴、26.链轮轴承座1、27.链轮轴承座2。
具体实施方式
[0020]
本实用新型提供了一种吸附式水下清洗机器人,基于stm32单片机控制,采用空化射流清洗方式,利用履带传动,永磁体吸附方式可以实现清洗机器人在船舶表面工作,机器人整体采用模块化和零浮力设计,本清洗机器人的清洗效率高,清洗时间短,清洗费用低,船舶不需要进坞可直接在海上或停泊地完成清洗作业。
[0021]
为了更好的理解上述技术方案,下面将结合说明书附图以及具体的实施方式对上述技术方案进行详细的说明。
[0022]
如图1至图5所示,一种吸附式水下清洗机器人,包括铅垂螺旋桨推进器1、水密插头2、步进电机3、步进电机固定架4、球头关节5、球头轴承6、控制舱 7、机器人框架8、弹簧9、空化射流旋转装置10、履带11、水平螺旋桨推进器 12、前置探照灯13、空化射流喷头14、后置探照灯15、弹簧连接座16、链轮支撑架17、主动链轮18、从动链轮119、链条20、从动链轮221、前置高清摄像头22、后置高清摄像头23、浮力材24、链轮轴25、链轮轴承座126、链轮轴承座227,所述的球头轴承6通过螺栓螺母连接在机器人框架8上,球头关节5与球头轴承6通过高副配合,球头关节5另外一端螺纹轴连接在链轮支撑架 17上的螺纹孔上,安装在链轮支撑架17上的弹簧连接座16通过弹簧连接在机器人框架8上,在链轮支撑架17上安装有步进电机固定架4,链轮轴承座26,在机器人框架8上安装有铅垂螺旋桨推进器1、水平螺旋桨推进器2,以及前置探照灯13、后置探照灯15、前置高清摄像头22、后置高清摄像头23的固定座,空化射流旋转装置10下端有螺纹孔,通过内六角螺钉连接在机器人框架8下表面上,主动链轮18、从动链轮119、从动链轮221通过螺母固定在链轮轴25 螺纹端一侧,链轮轴25另一侧与轴承配合安装在链轮轴承座26上,链轮轴承座 126、链轮轴承座227通过螺钉固定在链轮支撑架17上,步进电机3带动主动链轮18转动,主动链轮18带动履带链条20移动,从而实现履带11移动。
[0023]
其中,在实际应用中,所述的水下清洗机器人在作业前需从母船吊放至小艇,由小艇运送到待洗船只附近,吊放前需将水密缆和高压水输送管连接在机器人上,检查机器人控制舱7连接缆线是否存在问题,若无问题则通电开始工作,机器人经由小艇上的传送装置攀爬吸附到待洗船的表面上,之后母船上的空化射流高压机抽取海水进行加压,然后通过高压水管输送到水下清洗机器人并由空化射流喷头14喷出,利用空射化泡溃灭时产生的冲击力,达到清洗的目的,机器人按照设定的弓字形路线完成对船舶表面的清洗。
[0024]
其中,在实际应用中,所述的永磁体块安装在履带11上,通过自身产生的磁力使得机器人吸附在船舶表面,当水下清洗机器人在实际的清洗船舶表面过程时,永磁体产生的磁力不足以吸附在船舶表面时,4个垂直安装在机器人框架8 铅垂螺旋桨推进器1可以提供推力,使得水下清洗机器人贴合在船舶表面。
[0025]
其中,在实际应用中,所述的链轮支撑架17上安装有步进电机固定架4,通过步进电机固定架4将步进电机3固定在链轮支撑架17上,步进电机2转动,带动履带11移动,其工作原理为:当两个步进电机3同时正转时,水下清洗机器人机器人前进;两个步进电机3同时反转时,水下清洗机器人后退;当其中的一个步进电机3正转,另外的一个步进电机3反转时,水下清洗机器人在船舶表面实现转弯。
[0026]
其中,在实际应用中,所述的清洗机器人框架8上安装有前置高清摄像头 22、后置高清摄像头23,可以对除污的船舶表面进行时时监测,并将数据传输至上位机,操作人员通过对于上位机观察,做出判断,通过安装在上位机的操作手柄对安装在水下清洗机器人框架8上的控制舱7进行控制,完成对清洗机器人的控制。
[0027]
以上所述,仅是本实用新型的较佳实施例而已,并非对本实用新型作任何形式上的限制,虽然本实用新型已以较佳实施例揭露如上,然而并非用以限定本实用新型,任何熟悉本专业的技术人员,在不脱离本实用新型技术方案范围内,当可利用上述揭示的技术内容作出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本实用新型技术方案的内容,依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本实用新型技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1