基于最优受力状态的海洋应急个人救援终端及其实现方法与流程
1.本发明涉及海洋救援设备技术领域,特别涉及基于最优受力状态的海洋应急个人救援终端、海洋应急个人救援终端的实现方法。
背景技术:
2.由于海洋错综复杂的环境,在海洋工作或海洋游玩的人员时不时会出现遇险的情况,这些人员有的是航海船舶的工作人员,有的是海洋探险人员。
3.对于人体来说,其遇险的情况不单单体现在掉入或沉入海水中那么简单。当人缺水或缺食时,人体的各项生命体征均会发生变化,若不能及时抢救,还未等到人掉入或沉入海水中,缺水或缺食的人就可能会随时失去生命。若人掉入或沉入海水中,则体现在人体缺氧的表现。
4.目前,针对于人体海洋救援终端来说,已具有定位、通信的功能。但仍存在着以下缺点:1)无法根据个人的生命体征进行遇险判断;2)个人佩戴终端后,无法根据佩戴后终端的受力变化进行遇险判断;3)在终端定位及通信上,通常采用gps模块进行定位,不能进行通信传输,且定位精度较低。
技术实现要素:
5.针对背景技术中指出的问题,本发明提出基于最优受力状态的海洋应急个人救援终端、海洋应急个人救援终端的实现方法。
6.基于最优受力状态的海洋应急个人救援终端,其包括壳体,所述壳体内固定设置微处理器,所述微处理器电性连接信息收发模块,所述微处理器电性连接定位模块和非接触式生命体征传感器,非接触式生命体征传感器用于检测使用者的生命体征数据;
7.在非接触式生命体征传感器采集后的信号处理通过以下等式来表示:
[0008][0009]
其中为调制信号,m2为波形信号的最大值,m1为波形信号的最小值;
[0010]
所述壳体包括第一壳体部和第二壳体部,所述第一壳体部和所述第二壳体部之间的夹角设置为a,所述第一壳体部设置有第一力传感器,所述第二壳体部设置有第二力传感器,所述第一力传感器与所述第二力传感器两者均与所述微处理器电性连接;
[0011]
壳体的受力公式如下:
[0012][0013]
所述第一力传感器的受力方向与所述第一壳体部的平面相垂直,所述第二力传感器的受力方向与所述第二壳体部的平面相垂直;所述信息收发模块包括北斗gps二合一天线模块。
[0014]
根据本发明中海洋应急个人救援终端的一个实施例,所述定位模块包括定位状态检测模块、gps模块、北斗rnss模块和北斗rdss模块。
[0015]
根据本发明中海洋应急个人救援终端的一个实施例,所述gps模块、所述北斗rnss模块和所述北斗rdss模块三者均通过射频模块与所述北斗gps二合一天线模块电性连接,所述北斗gps二合一天线模块的发射通道频率设置为1611.60—1619.76mhz,接收通道频率设置为2487.67—2495.83mhz。
[0016]
根据本发明中海洋应急个人救援终端的一个实施例,所述定位状态检测模块包括陀螺仪模块、触水电极模块和加速度传感器,所述触水电极模块包括电极,所述电极穿过所述壳体延伸至所述壳体的外部。
[0017]
根据本发明中海洋应急个人救援终端的一个实施例,还包括报警模块、电源管理模块、显示模块和交互模块,所述报警模块、所述电源管理模块、所述显示模块和所述交互模块均电性连接所述微处理器。
[0018]
根据本发明中海洋应急个人救援终端的一个实施例,所述电源管理模块包括蓄电池和无线充电模块。
[0019]
根据本发明中海洋应急个人救援终端的一个实施例,所述报警模块包括声光报警器,所述交互模块包括主动报警的按键、主动撤回报警的按键和终端开关的按键,所述显示模块包括电量显示灯和正常定位状态显示灯。
[0020]
基于最优受力状态的海洋应急个人救援终端的实现方法,用于实现海洋应急个人救援终端的工作运行,
[0021]
海洋应急个人救援终端包括第一壳体部、第二壳体部、第一力传感器、第二力传感器、微处理器、gps模块、北斗rnss模块、北斗rdss模块、非接触式生命体征传感器、北斗gps二合一天线模块、陀螺仪模块、触水电极模块、加速度传感器、声光报警器、蓄电池、无线充电模块、主动报警的按键、主动撤回报警的按键和终端开关的按键、电量显示灯和正常定位状态显示灯;
[0022]
实现方法包括以下步骤:
[0023]
s1.设置第一壳体部和第二壳体部之间的夹角a,第一壳体部的重力p1进行分解且分解为分力p1x和分力p1y,其中终端的摩擦力与分力p1x相抵消,终端对使用者的作用力与分力p1y相同,第一力传感器检测到与分力p1y相同的作用力,同理,第二壳体部的重力p2进行分解且分解为分力p2x和分力p2y,其中终端的摩擦力与分力p2y相抵消,终端对使用者的作用力与分力p2x相同,第二力传感器检测到与分力p2x相同的作用力;
[0024]
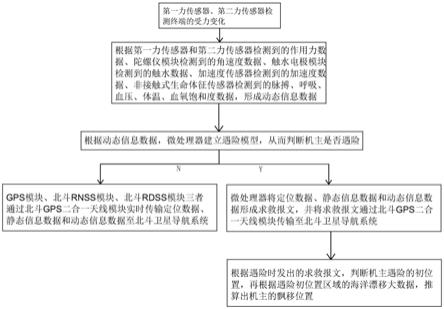
s2.根据第一力传感器和第二力传感器检测到的作用力数据、陀螺仪模块检测到的角速度数据、触水电极模块检测到的触水数据、加速度传感器检测到的加速度数据、非接触式生命体征传感器检测到的脉搏、呼吸、血压、体温、血氧饱和度数据,形成使用者的动态信息数据,并将动态信息数据发送至微处理器,微处理器接收并处理动态信息数据;
[0025]
s3.根据动态信息数据,微处理器建立遇险模型,从而判断机主是否遇险;
[0026]
s4.若判断机主没有遇险,gps模块、北斗rnss模块、北斗rdss模块三者通过北斗gps二合一天线模块实时传输定位数据、静态信息数据和动态信息数据至北斗卫星导航系统;
[0027]
s5.若判断机主遇险,微处理器将定位数据、静态信息数据和动态信息数据形成求救报文,并将求救报文通过北斗gps二合一天线模块传输至北斗卫星导航系统;
[0028]
s6.根据步骤s5中机主遇险时发出的求救报文,判断机主遇险的初位置,再根据遇险初位置区域的海洋漂移大数据,推算出机主的飘移位置。
[0029]
根据本发明中海洋应急个人救援终端的实现方法的一个实施例,所述静态信息数据包括编码和名称。
[0030]
综上所述,本发明的有益效果为:
[0031]
1.通过将北斗rdss/rnss终端产品、gps设备集成在终端中,利用gps模块和北斗rnss/rdss模块之间的配合实现终端的双重定位,增加了定位精度和定位速度;
[0032]
2.设计了北斗gps二合一天线模块,可以形成求救报文,收发定位数据、静态信息数据和动态信息数据;
[0033]
3.设置了第一力传感器、第二力传感器、非接触式生命体征传感器可以检测到个人的生命体征及运动特征,从而丰富个人的遇险模型,更加精准判断个人遇险情况,保证个人的生命安全。
附图说明
[0034]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0035]
图1为本发明实施例中海洋应急个人救援终端的实现方法的流程图;
[0036]
图2为终端的作用力示意图,具体地,图2(a)为现有技术中终端的作用力示意图,图2(b)为本发明实施例中终端的作用力示意图,图2(c)为本发明实施例中终端位置发生变化后的作用力示意图;
[0037]
图3为本发明实施例中终端的结构示意图。
具体实施方式
[0038]
请参阅图1至图3。须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技
术内容得能涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
[0039]
首先说明一下本发明的设计初衷:现有技术中的海洋应急个人救援终端存在着终端无法判断个人遇险、终端定位精度低等问题,为了解决上述问题,本发明提供了基于最优受力状态的海洋应急个人救援终端、海洋应急个人救援终端的实现方法的具体实施方式。
[0040]
如图3所示,基于最优受力状态的海洋应急个人救援终端,其包括壳体,壳体包括具有夹角的第一壳体部和第二壳体部,壳体的密封性很好,不会进水。在壳体内固定设置微处理器,微处理器电性连接信息收发模块、定位模块、非接触式生命体征传感器、第一力传感器、第二力传感器、报警模块、电源管理模块、显示模块和交互模块。
[0041]
其中定位模块包括定位状态检测模块、gps模块、北斗rnss模块和北斗rdss模块,定位状态检测模块包括陀螺仪模块、触水电极模块和加速度传感器;报警模块包括声光报警器,交互模块包括主动报警的按键、主动撤回报警的按键和终端开关的按键,显示模块包括电量显示灯和正常定位状态显示灯。电源管理模块包括蓄电池和无线充电模块。信息收发模块包括北斗gps二合一天线模块。
[0042]
综上,海洋应急个人救援终端包括第一壳体部、第二壳体部、微处理器、第一力传感器、第二力传感器、非接触式生命体征传感器、gps模块、北斗rnss模块、北斗rdss模块、北斗gps二合一天线模块、陀螺仪模块、触水电极模块、加速度传感器、声光报警器、蓄电池、无线充电模块、主动报警的按键、主动撤回报警的按键和终端开关的按键、电量显示灯和正常定位状态显示灯。
[0043]
gps模块、北斗rnss模块和北斗rdss模块三者均通过射频模块与北斗gps二合一天线模块电性连接,北斗gps二合一天线模块的发射通道频率设置为1611.60—1619.76mhz,接收通道频率设置为2487.67—2495.83mhz。
[0044]
本实施例的通信技术指标如下表所示:
[0045][0046]
非接触式生命体征传感器用于检测使用者的生命体征数据,微处理器用于终端工作运行的控制;第一力传感器和第二力传感器用于检测终端的受力;非接触式生命体征传感器用于检测人体的生命特征;gps模块、北斗rnss模块、北斗rdss模块用于获取定位数据、静态信息数据、动态信息数据;北斗gps二合一天线模块用于定位数据、静态信息数据、动态信息数据的传输;陀螺仪模块、触水电极模块、加速度传感器用于获取角速度、触水情况、加速度;声光报警器发出声音和灯光。主动报警的按键sos,可以进行主动求救。触水电极模块包括电极,电极穿过壳体延伸至壳体的外部。
[0047]
如图2所示,壳体包括第一壳体部和第二壳体部,第一壳体部和第二壳体部之间的夹角设置为a,在本实施例中a=120
°
。第一力传感器设置在第一壳体部内,第二力传感器设置在第二壳体部内,第一力传感器的受力方向与第一壳体部的平面相垂直,第二力传感器的受力方向与第二壳体部的平面相垂直。如图2(a)所示,为现有技术中终端的作用力示意
图;如图2(b)、2(c)所示,为本实施例中终端位置发生变化前后的作用力示意图。
[0048]
壳体的受力公式如下:
[0049][0050]
如图1所示,基于最优受力状态的海洋应急个人救援终端的实现方法,用于实现海洋应急个人救援终端的工作运行。实现方法包括以下步骤:
[0051]
s1.设置第一壳体部和第二壳体部之间的夹角a,在本实施例中a=120
°
。第一壳体部的重力p1进行分解且分解为分力p1x和分力p1y,其中终端的摩擦力与分力p1x相抵消,终端对使用者的作用力与分力p1y相同,第一力传感器检测到与分力p1y相同的作用力,同理,第二壳体部的重力p2进行分解且分解为分力p2x和分力p2y,其中终端的摩擦力与分力p2y相抵消,终端对使用者的作用力与分力p2x相同,第二力传感器检测到与分力p2x相同的作用力。当个人的运动特征发生剧烈变化时,第一力传感器和第二力传感器检测的数据会发生较大的变化。
[0052]
s2.根据第一力传感器和第二力传感器检测到的作用力数据、陀螺仪模块检测到的角速度数据、触水电极模块检测到的触水数据、加速度传感器检测到的加速度数据、非接触式生命体征传感器检测到的脉搏、呼吸、血压、体温、血氧饱和度数据,形成使用者的动态信息数据,并将动态信息数据发送至微处理器,微处理器接收并处理动态信息数据。
[0053]
在非接触式生命体征传感器采集后的信号处理通过以下等式来表示:
[0054][0055]
其中为调制信号,m2为波形信号的最大值,m1为波形信号的最小值。
[0056]
s3.根据动态信息数据,微处理器建立遇险模型,从而判断机主是否遇险;
[0057]
s4.若判断机主没有遇险,gps模块、北斗rnss模块、北斗rdss模块三者通过北斗gps二合一天线模块实时传输定位数据、静态信息数据和动态信息数据至北斗卫星导航系统,其中静态信息数据包括编码和名称。
[0058]
s5.若判断机主遇险,微处理器将定位数据、静态信息数据和动态信息数据形成求救报文,并将求救报文通过北斗gps二合一天线模块传输至北斗卫星导航系统。
[0059]
s6.根据步骤s5中机主遇险时发出的求救报文,判断机主遇险的初位置,再根据遇险初位置区域的海洋漂移大数据,推算出机主的飘移位置。
[0060]
综上所述,本实施例的产品通过将北斗rdss/rnss终端产品、gps设备集成在终端中,利用gps模块和北斗rnss/rdss模块之间的配合实现终端的双重定位,增加了定位精度和定位速度;设计了北斗gps二合一天线模块,可以形成求救报文,收发定位数据、静态信息数据和动态信息数据。设置了第一力传感器、第二力传感器、非接触式生命体征传感器可以检测到个人的生命体征及运动特征,从而丰富个人的遇险模型,更加精准判断个人遇险情
况,保证个人的生命安全。
[0061]
以上所述的仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1