用于码头检测的无人船的制作方法
1.本发明涉及码头病害检测领域,更具体地说,涉及一种用于码头检测的无人船。
背景技术:
2.传统的码头外观检测,需要雇佣渔船,采用人工携带摄影摄像设备,乘坐渔船沿码头按规定以固定距离进行录像或拍照检查,发现问题后,需要靠近码头,使用钢尺等测量设备,对病害尺寸进行测量。但人工测量有诸多问题:
3.1、伴随禁渔期法令的严格实施,港区附近租用渔船进行外观检测越来越难,成本越来越高;2、渔船驾驶人员素质不一,安全意识淡薄,海上作业安全风险较大;3、由于数百米的码头结构形式基本相似,人工录像、摄影的视频很难精确确定拍摄位置;4、渔船的晃动会传递给摄像设备,拍摄后画面摇摇晃晃,后期人工查看视频,会出现眩晕状态,编辑报告难度系数较高;5、受到渔船吃水深度、船体长度、动力因素等影响,无法靠近较浅水域进行检查作业。
技术实现要素:
4.本发明要解决的技术问题是提供一种用于码头检测的无人船,以通过无人船快速实现码头病害尺寸、位置、状态的检测以及解决病害区域与水深状态的分析联动等问题。
5.为了达到上述目的,本发明采取以下技术方案:
6.一种用于码头检测的无人船,包括两个平行的双气囊浮筒,每个双气囊浮筒由两个气囊浮筒拼接固定而成;
7.一个船体平台可拆卸式固定于两个双气囊浮筒上方;船体平台的前端底部连接有转向推进器,船体平台的后端底部连接有动力推进器,转向推进器的推力方向与前后方向垂直,动力推进器的推力方向与前后方平行;
8.船体平台上设置有无人船控制箱,无人船控制箱通过控制线连接于动力推进器与转向推进器;无人船控制箱内还设置有通信系统和推进器电池;
9.船体平台的中部下方还固定有测深换能器探头;船体平台的前后端还分别设置有gps定位器,分别为位于前端的船艏gps定位器以及位于后端的船尾gps定位器;
10.船体平台上方还架设有设备架,设备架的侧面中部设置有led探照灯,设备架的侧面前后端设置有激光指向器,led探照灯和激光指向器的光照方向均为垂直于前后方向的同一侧面方向;设备架中心顶部还通过稳定云台设置有高清摄像头;
11.船体平台上方还设置有测深仪设备箱,测深仪设备箱连接于gps定位器以及测深换能器探头。
12.无人船控制箱位于设备架和船艏gps定位器之间,测深仪设备箱位于设备架和船尾gps定位器之间。
13.gps定位器为差分型gps定位器。
14.船体平台上还设置有陀螺仪,陀螺仪连接于测深仪设备箱。
15.测深换能器探头、船艏gps定位器以及船尾gps定位器均位于同一竖直面,且测深换能器探头在水平方向上位于船艏gps定位器和船尾gps定位器的正中间。
16.本发明相对于现有技术的优点在于,可以大幅提高检测工作效率,降低了生产成本,提高了码头检测的安全可靠性,节能环保。由于本发明船体较小,对周边区域通行或停泊船只没有影响,还可以在码头前沿自主航行并快速绘制检测结果,且具备专家远程监控病害等功能,非常方便实用。
附图说明
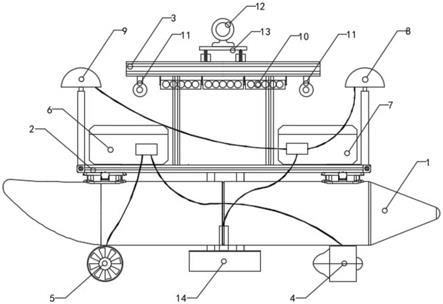
17.图1是本发明无人船侧面视图。
18.图中,1、双气囊浮筒,2、船体平台,3、设备架,4、动力推进器,5、转向推进器,6、无人船控制箱,7、测深仪设备箱,8、船尾gps定位器,9、船艏gps定位器,10、led探照灯,11、激光指向器,12、高清摄像头,13、稳定云台,14、测深换能器探头。
具体实施方式
19.下面结合附图对本发明的具体实施方式作描述。
20.如图1所示,本发明一种用于码头检测的无人船,包括两个平行的双气囊浮筒1,每个双气囊浮筒1由两个气囊浮筒拼接固定而成;
21.一个船体平台2可拆卸式固定于两个双气囊浮筒1上方;船体平台2的前端底部连接有转向推进器5,船体平台2的后端底部连接有动力推进器4,转向推进器5的推力方向与前后方向垂直,动力推进器4的推力方向与前后方平行;
22.船体平台2上设置有无人船控制箱6,无人船控制箱6通过控制线连接于动力推进器4与转向推进器5;无人船控制箱6内还设置有通信系统和推进器电池;
23.船体平台2的中部下方还固定有测深换能器探头14;船体平台2的前后端还分别设置有gps定位器,分别为位于前端的船艏gps定位器9以及位于后端的船尾gps定位器8;
24.船体平台2上方还架设有设备架3,设备架3的侧面中部设置有led探照灯10,设备架3的侧面前后端设置有激光指向器11,led探照灯10和激光指向器11的光照方向均为垂直于前后方向的同一侧面方向;设备架3中心顶部还通过稳定云台13设置有高清摄像头12;
25.船体平台2上方还设置有测深仪设备箱7,测深仪设备箱7连接于gps定位器以及测深换能器探头14。
26.无人船控制箱6位于设备架3和船艏gps定位器9之间,测深仪设备箱7位于设备架3和船尾gps定位器8之间。
27.gps定位器为差分型gps定位器。
28.船体平台2上还设置有陀螺仪,陀螺仪连接于测深仪设备箱7。
29.测深换能器探头14、船艏gps定位器9以及船尾gps定位器8均位于同一竖直面,且测深换能器探头14在水平方向上位于船艏gps定位器9和船尾gps定位器8的正中间。
30.本发明中双体船,即双气囊浮筒1主要采用4气室的结构,即便单个泄气也不会沉没。推进器固定在船体,可以为双体船提供前进、后退、左右移动的功能。无人船控制箱6内包含控制、通信、动力电源等,实现无人船的远程控制。其中,动力推进器4可以控制无人船的前进、后退,转向推进器5可以控制无人船的前进或后退的方向。
31.船艏和船尾的gps定位器采用差分型rtk gps,可以对船体提供优于1厘米的精确平面定位和高程,通过平面定位坐标计算无人船实时航行位置,可实时掌握无人船与码头侧壁的间距,从而能够实时反算航向角度并控制推进器运动使得船体与码头方向始终保持平行。两台激光指向器11投射到码头侧壁的激光线与码头侧壁垂直。
32.led探照灯10主要给码头侧立面进行拍摄补光,激光指向器11由前后两台平行的激光组成,垂直于船体中心线,激光器间距为固定数值,激光投射在码头的位置间距与激光器安装间距一致。稳定云台13保证拍照过程稳定性,高清摄像头12采集照片,照片病害的位置由gps提供,病害尺寸参考拍摄照片的激光指向线间距进行等比例计算。具体来说,假设照片中发现病害尺寸是两条激光间距的0.5倍,而激光的实际间距为1米,那么病害的尺寸就是0.5米。
33.测深换能器探头14可以实现码头检测的码头前沿水深测量工作,通过水深测量和潮位高度进行推算,可计算病害区域水深及拍摄照片设备位置高度。
34.更具体地说,通过gps定位器可以准确测量到无人船所处经纬度,从而根据已有测量数据获得当地水底的地质高度,结合测深换能器探头14所测得的水深即可相比单独利用gps而言更准确地获得无人船的竖直位置,从而获得更准确的三维位置。除此之外,可以在无人船上设置姿态仪或陀螺仪或陀螺减摇仪,从而对于无人船晃动时测深换能器探头14的指向位置偏差进行记录,从而修正数据。测深换能器探头14、gps定位器、陀螺仪等均连接至测深仪设备箱7进行数据处理。高清摄像头12、led探照灯10和激光指向器11等均可以联网,从而可以实时观测码头情况并实时控制无人船。
35.总结来说,通过本发明无人船,可以准确定位码头病害的位置以及病害的尺寸,相比人工实地操作而言非常方便。
36.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明披露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1