一种菌剂投放无人船的制作方法
1.本实用新型涉及菌剂投放技术领域,尤其涉及一种菌剂投放无人船。
背景技术:
2.随着经济的不断发展,水体环境污染治理成为当前国内外重点关注的课题,水质富营养化、黑臭等各种水污染问题日益严重,逐渐威胁到人们的正常生产生活;
3.随着科技的发展,菌剂投放无人船的投入使用量不断增加,为水体环境污染的治理提供了新方案;然而,经实操发现,目前投入使用的无人船在以下两个方面还存在不足:
4.1.现有菌剂投放船在投放菌剂时存在投放不均匀、菌剂投放后因扩散速度慢而导致治理效果不佳的问题;
5.2.现有菌剂投放船的转弯半径较大,使得菌剂投放船无法在较狭窄区域顺利转弯,导致作业的投放精准度大大下降。
技术实现要素:
6.为了解决背景技术中的问题,本实用新型提供了一种菌剂投放无人船,具体技术方案如下:
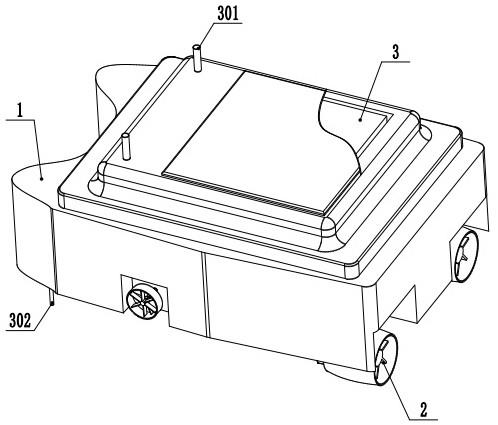
7.一种菌剂投放无人船,包括船体,所述船体的甲板上设有控制系统,船舱内设有动力装置和菌剂投放装置;所述控制系统通过设置在船体底部的水质检测传感器反馈的实时监测结果来控制菌剂投放装置的菌剂投放,并通过信息传输装置与操作平台进行信息交互;所述动力装置包括主推进器和侧推进器,所述主推进器安装在船体后端设置的主推进室内,所述侧推进器安装在船体侧面设置的侧推进室内,用于辅助船体在较小半径内进行转弯。
8.进一步地,所述水质检测传感器通过伸缩杆设置在船体底部。
9.进一步地,所述船体的船舱内设有动力舱和菌剂投放舱,所述菌剂投放舱设置在船舱中间位置,所述菌剂投放装置设置在菌剂投放舱内,所述动力舱数量为两个,设置在菌剂投放舱的两侧,所述动力装置的控制机构对应设置在两侧的动力舱内。
10.进一步地,所述动力装置的控制机构包括方向控制杆和控制弹簧,所述主推进器的固定杆转动贯穿主推进室与动力舱之间的隔板并与方向控制杆的一端固定连接;所述侧推进器的固定杆滑动贯穿侧推进室与动力舱之间的隔板并与方向控制杆的另一端活动连接;所述控制弹簧设置在方向控制杆与动力舱的舱壁之间,用于方向控制杆的调正复位。
11.进一步地,所述控制弹簧为压缩弹簧,设置在侧推进器的对侧面。
12.进一步地,所述菌剂投放装置包括菌剂箱、伺服电机、微纳米气泡泵、分流控制块、电动绞盘和微纳米气泡发生器;所述菌剂箱与微纳米气泡泵的进液口通过管路连接,并通过伺服电机控制微纳米气泡泵的工作输出流量;所述微纳米气泡泵的出液口与分流控制块的进口连接;所述电动绞盘上的管路一端与分流控制块的其中一个出口连接,另一端滑动穿过菌剂投放舱底板伸入水中;所述微纳米气泡发生器至少设置有两个,其中一个与电动
绞盘上伸入水中的管路一端固定连接,并通过电动绞盘的收放实现微纳米气泡发生器在水中的不同深度位置设定,其余的微纳米气泡发生器固定安装在船体底部,并通过管路与分流控制块的其余出口对应连接;所述分流控制块上对应每个出口设置有插装式通断阀。
13.进一步地,所述微纳米气泡发生器设置有三个,其中两个分别固定安装在主推进器的前侧。
14.进一步地,所述微纳米气泡发生器的前部为鱼鳍状,且分别固定安装在主推进器前侧的微纳米气泡发生器的前部与船体行进方向一致。
15.进一步地,所述船体的甲板上还布设有若干个摄像头。
16.进一步地,所述菌剂箱内设有液位传感器。
17.与现有技术相比,本实用新型的优点在于:
18.1.本实用新型通过在菌剂投放装置配置微纳米气泡泵和微纳米气泡发生器,并结合动力装置实现了菌剂的快扩散性均匀投放;同时,通过动力装置中主推进器和侧推动器的配合实现了船体的小半径转弯,保证了作业的投放精准度。
19.2.本实用新型通过将一个微纳米气泡发生器与电动绞盘连接、另外两个分别固定安装在主推进器前侧的方式,不仅保证了无人船在边行进边治理水面污染时菌剂投放的均匀性和快扩散性,而且实现了无人船在静止时不同水深的菌剂定点投放。
20.3.本实用新型通过伸缩杆实现了水质检测传感器对不同水深水质的监测,为菌剂的精准投放提供了条件。
21.4.本实用新型的动力装置通过方向控制杆和控制弹簧实现了侧推动器在推动船体转弯时主推动器驱动方向的自动一致性控制,有效保证了船体的较小转弯半径和转弯速度,结构简单,成本低廉,且可靠耐用。
附图说明
22.图1-2为本实用新型的整体装配结构示意图;
23.图3-5为本实用新型的船舱内部装配结构示意图;
24.图6为本实用新型动力装置的整体结构示意图;
25.图7为本实用新型四通控制块的结构示意图;
26.图8为本实用新型微纳米气泡发生器的结构示意图;
27.图中:1-船体,2-动力装置,3-控制系统,4-菌剂投放装置,101-动力舱,102-菌剂投放舱,103-主推进室,104-侧推进室,201-主推进器,202-方向控制杆,203-侧推进器,204-控制弹簧,301-信息传输装置,302-水质检测传感器,401-菌剂箱,402-伺服电机,403-微纳米气泡泵,404-四通控制块,405-电动绞盘,406-微纳米气泡发生器,404a-进口,404b-出口,404c-插装式通断阀。
具体实施方式
28.为了使本技术领域的人员更好地理解本实用新型方案,下面将对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分的实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本实用新型保护的范围。
29.实施例:
30.如图1-3所示,一种菌剂投放无人船,包括船体1,船体1的甲板上设有控制系统3,船舱内设有动力装置2和菌剂投放装置4;控制系统3通过设置在船体1底部的水质检测传感器302反馈的实时监测结果来控制菌剂投放装置4的菌剂投放,并通过信息传输装置301远程与操作平台进行信息交互;船体1前部两侧为鱼鳍状,保证船体1的低阻力前行;信息传输装置301设置在船体1的甲板上;动力装置2包括主推进器201和侧推进器203,主推进器201安装在船体1后端设置的主推进室103内,侧推进器203安装在船体1侧面设置的侧推进室104内,用于辅助船体1在较小半径内进行转弯,同时,为了保证侧推进器203能够更高效率工作,船体1的侧面设置为中间宽两头窄的形状,侧推进室104设置在船体1的前部侧面,且侧推进器203的推进方向与船体侧面相垂直;其中,主推进器201、侧推进器203、信息传输装置301和水质检测传感器302与控制系统3电性连接。
31.本实施例中,为了保证水质检测传感器302能够监测不同水深的水质情况,如图2所示,水质检测传感器302通过伸缩杆设置在船体1底部。
32.为了保证动力装置2和菌剂投放装置4能够相互隔离作业,如图3-4所示,船体1的船舱内设有动力舱101和菌剂投放舱102,菌剂投放舱102设置在船舱中间位置,所述菌剂投放装置4设置在菌剂投放舱102内,所述动力舱101数量为两个,设置在菌剂投放舱102的两侧,所述动力装置2的控制机构对应设置在两侧的动力舱101内。
33.如图5-6所示,本实施例中,动力装置2的控制机构包括方向控制杆202和控制弹簧204,主推进器201的固定杆转动贯穿主推进室103与动力舱101之间的隔板并与方向控制杆202的一端固定连接;侧推进器203的固定杆滑动贯穿侧推进室104与动力舱101之间的隔板并与方向控制杆202的另一端活动连接;控制弹簧204为压缩弹簧,设置在方向控制杆202与动力舱101的舱壁之间,并位于侧推进器203的对侧面,用于方向控制杆202的调正复位;通过方向控制杆202和控制弹簧204实现了侧推动器203在推动船体转弯时主推动器201驱动方向的自动一致性控制,有效保证了船体1的较小转弯半径和转弯速度,结构简单,成本低廉,且可靠耐用。
34.如图4、5、7所示,本实施例中,菌剂投放装置4包括菌剂箱401、伺服电机402、微纳米气泡泵403、分流控制块404、电动绞盘405和微纳米气泡发生器406;菌剂箱401内设有液位传感器,能够实时监测菌剂的剩余量;菌剂箱401与微纳米气泡泵403的进液口通过管路连接,并通过伺服电机402控制微纳米气泡泵403的工作输出流量;微纳米气泡泵403的出液口与分流控制块404的进口404a连接;电动绞盘405上的管路一端与分流控制块404的其中一个出口404b连接,另一端滑动穿过菌剂投放舱102底板伸入水中;微纳米气泡发生器406设置有三个,其中一个与电动绞盘405上伸入水中的管路一端固定连接,并通过电动绞盘405的收放实现微纳米气泡发生器406在水中的不同深度位置设定,另外两个微纳米气泡发生器406分别固定安装在主推进器201的前侧,并通过管路与分流控制块404的其余出口404b对应连接;所述分流控制块404上对应每个出口404b设置有插装式通断阀404c;其中,液位传感器、伺服电机402、插装式通断阀404c及电动绞盘405与控制系统3电性连接;
35.通过将一个微纳米气泡发生器406与电动绞盘405连接、另外两个分别固定安装在主推进器201前侧的方式,不仅保证了无人船在边行进边治理水面污染时菌剂投放的均匀性和快扩散性,而且实现了无人船在静止时不同水深的菌剂定点投放。
36.本实施例的一个具体实施方式,如图8所示,微纳米气泡发生器406的前部为鱼鳍状,且分别固定安装在主推进器201前侧的微纳米气泡发生器406的前部与船体1行进方向一致;这样设置保证了船体1的低阻力行进。
37.为了便于操作人员能够远程操作,船体1的甲板四周各布设有一个摄像头,通过摄像头,操作人员可实时远程查看水面情况,而不用到现场进行操作,提高工作效率。
38.工作方法:
39.首先,在操作平台远程或现场操作下,无人船在行进过程中通过水质检测传感器302实时监测水质情况;当水质检测传感器302监测到水质超标时,控制系统3通过信息传输装置301向操作平台发送信息,操作者根据显示信息继续控制无人船巡逻航行,并最终确认水体污染区域;
40.第二,操作者通过操作平台向控制系统3发送控制信号,先开启伺服电机402以及分流控制块404上对应主推进器201前侧的微纳米气泡发生器406的插装式通断阀404c,同时开启两个主推进器201,实现无人船边行进边投放菌剂;当需要转弯时,位于弯道外侧的侧推进器203启动,同时位于弯道内侧的主推进器201关闭,完成小半径转弯;
41.第三,完成水体表面菌剂投放后,无人船行进至逐个预设点进行深度水质监测,到达某一设定地点后,主推进器201和侧推进器203均关闭,船体1静止,此时水质检测传感器302通过伸缩杆进行不同深度水质监测,当检测到水质超标时,水质检测传感器302继续下潜,直至找到污染源中心;而后,电动绞盘405开启,当微纳米气泡发生器406下潜至污染源中心时,开启伺服电机402以及分流控制块404上对应的插装式通断阀404c,根据水质污染程度投放设定的菌剂量后,伺服电机402以及插装式通断阀404c关闭,微纳米气泡发生器406在电动绞盘405作用下收回至船体1底部;而后,无人船向下一个预设点行进;
42.由此完成无人船的菌剂投放工作。
43.以上所述,仅为本实施例较佳的具体实施方式,但本实施例的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实施例揭露的技术范围内,根据本实施例的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实施例的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1