一种用于无人船的小型ROV收放系统的制作方法
一种用于无人船的小型rov收放系统
技术领域
1.本发明涉及无人船技术领域,尤其涉及一种用于无人船的小型rov收放系统。
背景技术:
2.随着无人技术的快速发展,将无人船运用到海上进行环境探测、科学研究、军事用途变得越来越普遍,无人船具备作业效率高、时间长、范围广等优点,能很好满足水面工作需求,但针对水下作业需求,尤其是水下的精准作业,具有很多不足之处。
3.随着rov技术的发展,将rov用于水下作业,完美的弥补了无人船的不足之处,但是rov因为线缆的缘故,作业范围受到很大限制。将无人船和rov进行结合,通过无人船携带rov进行协同作业,是一种新的解决思路。但是,在无人船和rov进行协同作业时,需要解决rov在无人船上自主释放回收问题。
技术实现要素:
4.本发明的目的是为了解决现有技术中存在的无人船上rov无法自主释放回收的缺点,而提出的一种用于无人船的小型rov收放系统。
5.为了实现上述目的,本发明采用了如下技术方案:
6.设计一种用于无人船的小型rov收放系统,包括吊放单元、对接锁止单元及控制终端,所述吊放单元包括绞盘机构、导线机构、滑轮吊放机构和rov线缆;所述对接锁止单元包括对接机构和锁定机构。
7.优选的,所述绞盘机构包括绞盘、绞盘轴、绞盘轴承及轴承座、第一减速器、减速器固定件、直流伺服电机、直流伺服电机支架、水密电滑环、编码器及编码器固定件,所述绞盘由所述直流伺服电机驱动旋转,所述绞盘轴连接所述水密电滑环内环并通过联轴器与所述编码器连接,所述绞盘轴内部呈空心状态,rov线缆从所述绞盘轴内部穿过并通过所述水密电滑环实现与rov的可转动电气连接。
8.优选的,所述导线机构包括第一滚珠丝杠副、滚珠丝杠固定底座、限位器
ⅰⅱ
及限位器固定块
ⅰⅱ
、两个线缆张紧轮、张紧轮支架、导线口和张紧弹簧,所述第一滚珠丝杠副通过所述滚珠丝杠固定底座固定在无人船甲板上,在左右位置通过所述限位器固定块
ⅰⅱ
安装限位器
ⅰⅱ
,所述张紧轮支架固定在所述第一滚珠丝杠副的螺母上,两个所述线缆张紧轮通过螺栓固定于所述张紧轮支架上,并在上部线缆张紧轮上安装有张紧弹簧,所述导线口设在所述张紧轮支架前端上,rov线缆穿过两个所述线缆张紧轮之间并从所述导线口穿出。
9.优选的,所述滑轮吊放机构包括上端滑轮机构和下端转动座,所述上端滑轮机构包括承重大滑轮、主动小滑轮、固定支架、距离调节板、第二减速器、第一电机,所述下端转动座包括轴承支座、上端支撑板、止推轴承及转动轴,所述承重大滑轮和所述主动小滑轮通过轮轴固定于所述固定支架和所述距离调节板上,所述主动小滑轮同轴连接至所述第二减速器。
10.优选的,所述锁定机构与所述对接环对接并固定所述对接环上,所述锁定机构包
括锁定环底座、四个自锁机构、水密环及水密板,在所述锁定环底座顶部安装有限位器ⅲ,所述锁定环底座与所述水密环及水密板固定。
11.优选的,所述自锁机构包括第二滚珠丝杠副、丝杠支座、第三减速器、第二电机、电机固定件、丝杠螺母、丝杠螺母运动导槽、主动连杆、摇杆、摇杆底座、被动连杆、限位块、锁定销及弹簧,所述第二滚珠丝杠副一端通过丝杠支座固定、另一端通过联轴器与所述第三减速器连接,通过所述第二电机减速带动丝杠螺母运动,所述丝杠螺母嵌入所述丝杠螺母运动导槽且末端连接在所述主动连杆上,所述主动连杆末端连接在所述摇杆中部,所述摇杆顶端通过所述摇杆底座固定于所述固定环底座上,所述摇杆另一端通过销钉连接至所述被动连杆,所述被动连杆末端通过销钉连接至所述锁定销,所述锁定销末端通过弹簧与所述锁定环底座拉在一起,所述锁定销插入所述锁定环底座锁定销孔,在所述锁定销末端后方安装所述限位块。
12.优选的,所述对接机构包括对接环、浮块、rov固定架、线缆固定座及线缆固定u形架,所述对接环呈锥形结构,并且在对接环的锥面上开设有锁止用的凹槽,所述浮块和所述rov固定架通过螺栓与所述对接环固定,所述rov固定架通过螺栓和rov线缆固定,rov线缆穿过对接环中部并通过线缆固定座及线缆固定u形架与所述对接环固定。
13.优选的,所述控制终端包括过载保护器、dc48-380v电源转换单元、dc48-19v电源转换单元、dc48-12v电源转换单元、dc48-5v电源转换单元、网络中继器、网络交换机、主控计算机、stm下位机控制器、绞盘伺服电机驱动器、滑轮吊放机构电机驱动器、导线机构电机驱动器、锁定环电机驱动器
ⅰ‑ⅳ
及散热风扇
ⅰⅱ
。
14.本发明提出的一种用于无人船的小型rov收放系统,有益效果在于:该用于无人船的小型rov收放系统在使用时,第二电机带动丝杠螺母沿着丝杠螺母运动导槽滑动,带动主动连杆、摇杆、被动连杆、锁定销运动,拉出锁定销释放对接环,释放rov;当回收rov时,吊放单元拉起对接环,在运动至锁止位置过程中,锁定销先被推出,然后在弹簧的作用下被拉回,卡在对接环的凹槽内,通过四个自锁机构同时工作,实现rov的自锁。
附图说明
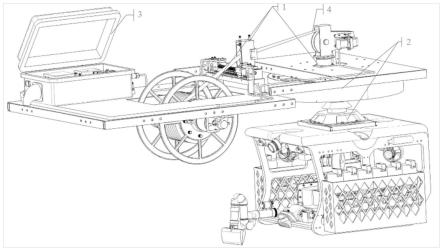
15.图1为本发明提出的一种用于无人船的小型rov收放系统的立体图;
16.图2为本发明提出的一种用于无人船的小型rov收放系统的图1中吊放单元的立体图;
17.图3为本发明提出的一种用于无人船的小型rov收放系统的图1中对接锁止单元的立体图;
18.图4为本发明提出的一种用于无人船的小型rov收放系统的图2中绞盘机构的立体图;
19.图5为本发明提出的一种用于无人船的小型rov收放系统的图2中导线机构的立体图;
20.图6为本发明提出的一种用于无人船的小型rov收放系统的图2中滑轮吊放机构的立体图;
21.图7为本发明提出的一种用于无人船的小型rov收放系统的图3中锁定环的立体分解图;
22.图8为本发明提出的一种用于无人船的小型rov收放系统的图7中自锁机构的放大图;
23.图9为本发明提出的一种用于无人船的小型rov收放系统的图3中对接机构的立体分解图;
24.图10为本发明提出的一种用于无人船的小型rov收放系统的控制终端的电路连接示意图。
25.图中:1-吊放单元、11-绞盘机构、111-绞盘、112-绞盘轴、11301~11302-绞盘轴承及轴承座、114-第一减速器、11401-减速器固定件、115-直流伺服电机、11501-直流伺服电机支架、116-水密电滑环、117-编码器、11701-编码器固定件、12-导线机构、121-第一滚珠丝杠副、122-滚珠丝杠副固定座、11301~11302-限位器
ⅰⅱ
、12401~12402—限位器固定块
ⅰⅱ
、125-线缆张紧轮、126-张紧轮支架、127-导线口、128-弹簧、13-滑轮吊放机构、131-承重大滑轮、132-固定支架、133-主动小滑轮、134-距离调节板、135-第二减速器、136-第一电机、137-轴承支座、138-上端支撑板、139-止推轴承、1310-转动轴、2-对接锁止单元、21-锁定机构、211-锁定环底座、212-自锁机构、213-水密环、214-水密板、2121-第二滚珠丝杠副、212101-丝杠支座、2122-第三减速器、2123-第二电机、212301-电机固定件、2124-丝杠螺母、2125-丝杠螺母运动导槽、2126-主动连杆、2127-摇杆、212701-摇杆底座、2128-被动连杆、2129-限位块、21210-锁定销、21211-弹簧、213-侧部水密环、214-底部水密板、22-对接机构、221-对接环、222-浮块、22301~22302-rov固定架、224-线缆固定座、225-线缆固定u形架、3-控制终端、4-rov线缆。
具体实施方式
26.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
27.实施例1
28.参照图1-3,一种用于无人船的小型rov收放系统,包括吊放单元1、对接锁止单元2及控制终端3,吊放单元1包括绞盘机构11、导线机构12、滑轮吊放机构13和rov线缆4;绞盘机构11、导线机构12和滑轮吊放机构13均设在无人船的甲板上,rov线缆4设在绞盘机构11、导线机构12和滑轮吊放机构13上,对接锁止单元2包括对接机构22和锁定机构21。锁定机构21设在无人船甲板下方,对接机构22设在rov上。控制终端3控制系统工作,并可直接接入无人船主控系统。
29.工作时,吊放单元1通过卷起或释放rov电缆4拉起或释放rov,当rov被提起至锁定位置后,锁定机构21锁定对接机构22,实现rov于无人船上的自锁固定。
30.实施例2
31.在实施例1的基础上,参照图2、4、5、6、7、8和9,作为本发明的另一优选实施例,与实施例1的区别在于,绞盘机构11包括绞盘111、绞盘轴112、绞盘轴承及轴承座11301~11302、第一减速器114、减速器固定件11401、直流伺服电机115、直流伺服电机支架11501、水密电滑环116、编码器117及编码器固定件11701,绞盘111与绞盘轴112连接,并通过左右轴承及轴承支座11301~11302与无人船甲板固定,绞盘轴112一端连接第一减速器114的输出轴,第一减速器114的输入轴连接在直流伺服电机115上,绞盘111由直流伺服电机115驱
动旋转,绞盘轴112连接水密电滑环116内环并通过联轴器118与编码器117连接,水密电滑环116外环与左右轴承及轴承支座11301~11302进行固定,编码器117通过编码器固定件11701与无人船甲板固定,编码器用于测量绞盘的转速,绞盘轴112内部呈空心状态,rov线缆4从绞盘轴112内部穿过并通过水密电滑环116实现与rov的可转动电气连接。
32.绞盘机构11用来收起或者是释放对接锁止单元2,从而实现rov的收起或者是释放,并通过绞盘111上的水密电滑环116实现控制终端3与rov的电气连接。
33.导线机构12用于引导缠绕或释放并拉紧rov线缆4,导线机构12包括第一滚珠丝杠副121、滚珠丝杠固定底座122、限位器
ⅰⅱ
11301~11302及限位器固定块
ⅰⅱ
12401~12402、两个线缆张紧轮125、张紧轮支架126、导线口127和张紧弹簧128,第一滚珠丝杠副121通过滚珠丝杠固定底座122固定在无人船甲板上,在左右位置通过限位器固定块
ⅰⅱ
12401~12402安装限位器
ⅰⅱ
11301~11302,限位器
ⅰⅱ
11301~11302用于限定限制机构的左右行程,张紧轮支架126固定在第一滚珠丝杠副121的螺母上,两个线缆张紧轮125通过螺栓固定于张紧轮支架126上,并在上部线缆张紧轮125上安装有张紧弹簧128,导线口127设在张紧轮支架126前端上,rov线缆4穿过两个线缆张紧轮125之间并从导线口127穿出。通过限制机构左右运动,引导rov线缆4在绞盘111上左右缠绕或释放。
34.滑轮吊放机构13包括上端滑轮机构和下端转动座,上端滑轮机构包括承重大滑轮131、主动小滑轮133、固定支架132、距离调节板134、第二减速器135、第一电机136,下端转动座包括轴承支座137、上端支撑板138、止推轴承139及转动轴1310,承重大滑轮131和主动小滑轮133通过轮轴固定于固定支架132和距离调节板134上,承重大滑轮131和主动小滑轮133之间的距离通过距离调节板134进行调节,主动小滑轮133同轴连接至第二减速器135。第一电机136自带编码器,可实时测量自身转速,通过第一电机136减速驱动主动小滑轮133转动,在rov线缆4处于松弛状态下,滚动rov线缆4进行释放。
35.轴承支座137底部固定于无人船,内部装入止推轴承139和转动轴1310,盖上上端支撑板138。上端滑轮机构固定在下端转动座的转动轴1310上,当导线机构12左右运动时,滑轮吊放机构13可随之进行左右转动,减小导线机构12与吊放机构13之间线缆的倾角,降低摩擦阻力。
36.锁定机构21与对接环221对接并固定对接环221,实现rov收起后的自锁,锁定机构21包括锁定环底座211、四个自锁机构212、水密环213及水密板214,锁定环底座211呈上部圆盘状下部喇叭状结构,当对接环221沿喇叭口向上运动时,由于喇叭口的收缩,对接环221将逐步引导至锁定位置,在锁定环底座211顶部安装有限位器ⅲ,限位器ⅲ用于限制对接环221的行程,锁定环底座211与水密环213及水密板214固定。水密环213及水密板214的设置为了防止水流泼溅对内部设备造成损坏。
37.自锁机构212包括第二滚珠丝杠副2121、丝杠支座212101、第三减速器2122、第二电机2123、电机固定件212301、丝杠螺母2124、丝杠螺母运动导槽2125、主动连杆2126、摇杆2127、摇杆底座212701、被动连杆2128、限位块2129、锁定销21210及弹簧21211,第二滚珠丝杠副2121一端通过丝杠支座212101固定、另一端通过联轴器与第三减速器2122连接,通过第二电机2123减速带动丝杠螺母2124运动,丝杠螺母2124嵌入丝杠螺母运动导槽2125且末端连接在主动连杆2126上,主动连杆2126末端连接在摇杆2127中部,摇杆2127顶端通过摇杆底座212701固定于固定环底座上,摇杆2127另一端通过销钉连接至被动连杆2128,被动
连杆2128末端通过销钉连接至锁定销21210,锁定销21210末端通过弹簧21211与锁定环底座211拉在一起,锁定销21210插入锁定环底座211锁定销孔,在锁定销21210末端后方安装限位块2129。限位块2129用于限制锁定销21210的行程。
38.对接机构22包括对接环221、浮块222、rov固定架22301~22302、线缆固定座224及线缆固定u形架225,对接环221呈锥形结构,并且在对接环221的锥面上开设有锁止用的凹槽,浮块222和rov固定架22301~22302通过螺栓与对接环221固定,浮块222的作用保证对接机构22水下的零浮力状态,rov固定架22301~22302通过螺栓和rov线缆4固定,rov线缆4穿过对接环221中部并通过线缆固定座224及线缆固定u形架225与对接环221固定。rov线缆4拉动对接环221实现rov的提起与释放。
39.工作时,第二电机2123带动丝杠螺母2124沿着丝杠螺母运动导槽2125滑动,带动主动连杆2126、摇杆2127、被动连杆2128、锁定销21210运动,拉出锁定销21210释放对接环221,释放rov;当回收rov时,吊放单元1拉起对接环221,在运动至锁止位置过程中,锁定销21210先被推出,然后在弹簧21211的作用下被拉回,卡在对接环221的凹槽内,通过四个自锁机构212同时工作,实现rov的自锁。
40.实施例3
41.在实施例1的基础上,参照图10,作为本发明的另一优选实施例,与实施例1的区别在于,控制终端3包括过载保护器、dc48-380v电源转换单元、dc48-19v电源转换单元、dc48-12v电源转换单元、dc48-5v电源转换单元、网络中继器、网络交换机、主控计算机、stm32下位机控制器、绞盘伺服电机驱动器、滑轮吊放机构电机驱动器、导线机构电机驱动器、锁定环电机驱动器
ⅰ‑ⅳ
及散热风扇
ⅰⅱ
。
42.过载保护器为系统提供电流过载保护,输入端接入无人船电源系统,输出端接入dc48-380v/dc48-19v/dc48-12v/dc48-5v电源,dc48-19v电源转换单元输出端接入主控计算机,为主控计算机供电。dc48-12v电源输出端接入锁定环电机驱动器
ⅰ‑ⅳ
,绞盘伺服电机驱动器、吊放机构电机驱动器、导线机构电机驱动器及散热风扇
ⅰⅱ
,为电机和风扇供电。dc48-5v电源转换单元输出端接入网络中继器、网络交换机及stm32下位机控制器,为所述单元供电。
43.电机驱动器信号控制端接入stm32下位机控制器,绞盘编码器、导线机构限位器
ⅰⅱ
接入stm32下位机控制器,获取各电机转速信息及位置信息。stm32下位机控制器接入主控计算机,将电机的各种信息传输至主控,由主控计算机进行决策,控制整个系统工作。主控计算机接入网络交换机,网络交换机分别接入无人船主控系统,网络中继器,与无人船主控系统进行通讯。网络中继器、dc48-380v电源转换单元通过电滑环接入rov电缆,为rov供电、进行数据交互。
44.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1