水下新型接杆式攻泥器系统的制作方法
1.本发明涉及海洋施工技术领域,尤其涉及水下新型接杆式攻泥器系统。
背景技术:
2.千斤穿引技术是沉船整体打捞的一项关键技术,该技术是通过在沉船底下穿多根钢丝,利用钢丝的提升力来实现沉船整体打捞的目的。传统千斤穿引是潜水员在水下用高压水或高压空气等手工完成,作业效率低、风险性高。另外,水中的压力随着水深而增加,若沉船位置水深较大,受人体生理条件限制,人工穿千斤的工作将不能展开。
3.水下攻泥器是一种利用水面遥控实现水下沉船千斤穿引的自动化设备,在沉船打捞中具有非常重要的应用价值,水下攻泥器的操作过程完全由操作人员在水面完成,目前有连续管和接杆式两种,其中:采用连续管技术的水下导向攻泥器具有作业效率高、定位信号传输方便等优点,但受制于柔性钻杆的强度限制其顶推力和破土能力有所不足;接杆式水下攻泥器采用非开挖钻机的高强度钻杆,顶推力大、破土能力强,在土质强度较高的海底作业时具有明显优势,接杆式水下攻泥器在作业过程中需要对钻杆进行连接和分离,作业环节和步骤较多,不方便监控以及调整,给整个海底作业带来不便,因此,本发明提出水下新型接杆式攻泥器系统以解决现有技术中存在的问题。
技术实现要素:
4.针对上述问题,本发明提出水下新型接杆式攻泥器系统,该水下新型接杆式攻泥器系统便于监测钻机水下本体的所有传感器信息及钻进情况,从而及时调整和操控。
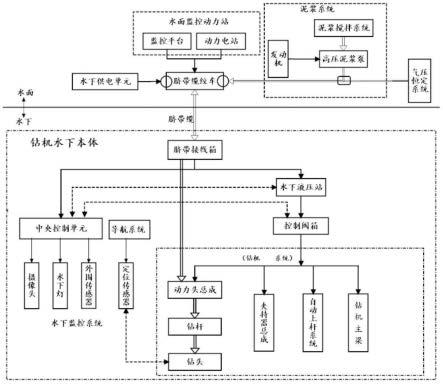
5.为实现本发明的目的,本发明通过以下技术方案实现:水下新型接杆式攻泥器系统,包括水面部和钻机水下本体,所述水面部包括水面监控动力站、水下供电单元和泥浆系统,所述水面监控动力站用于监测钻机水下本体的所有传感器信息及钻进情况,所述钻机水下本体包括设置于主框架上的钻机系统、水下液压系统、水下监控系统和补偿系统,所述水下液压系统与钻机系统相连并提供动力,所述补偿系统和水下监控系统固定设置于主框架上;所述水面监控动力站和水下供电单元通过脐带缆向钻机水下本体提供动力和控制信息,由水面遥控驱动钻机水下本体完成穿引作业,所述泥浆系统通过绞车软管将水面的高压泥浆传输至钻机水下本体,进行喷射破土。
6.进一步改进在于:所述钻机系统包括:钻机主梁、动力头总成、自动上杆系统、夹持器总成,所述动力头总成设置于钻机主梁上,自带驱动装置沿主梁前后移动,实现钻杆推送与回收;所述自动上杆系统设置于钻机主梁一侧,用于存储钻杆,并配合动力头总成完成钻杆的送杆与收杆;所述夹持器总成固定设置于钻机主梁前端,用于钻杆末端夹持,并与动力总成配合实现钻杆丝扣的连接与拆卸。
7.进一步改进在于:所述钻杆上设有钻头,且钻头上设有导航系统,所述导航系统包括定位传感器。
8.进一步改进在于:所述水下液压系统由水下液压站、水下阀箱组成,所述水下液压站包括水下电机、液压泵、油箱及过滤模块;所述水下阀箱为控制阀箱。
9.进一步改进在于:所述水下监控系统包括中央控制单元、摄像头、水下灯和外围传感器,所述摄像头和外围传感器的信号输出端连接中央控制单元,且中央控制单元将信号反馈给水面监控动力站。
10.进一步改进在于:所述泥浆系统包括:高压泥浆泵和储浆罐,所述高压泥浆泵通过发动机驱动运行,所述储浆罐内设有泥浆搅拌系统,所述高压泥浆泵入口与储浆罐出口之间采用软管连接,且高压泥浆泵出口与绞车软管入口连接,所述绞车软管为连接泥浆系统与钻机水下本体的传输通道,用于将水面的高压泥浆传输至钻机水下本体,由钻杆末端进入钻杆内部,最后从钻头处喷射后完成破土。
11.进一步改进在于:所述泥浆系统连接有气压恒定系统,作业期间,所述储浆罐向高压泥浆泵提供泥浆或海水,且高压泥浆泵增压后输出高压泥浆或海水,所述气压恒定系统用于恒定控制增压。
12.进一步改进在于:所述水面监控动力站包括监控平台和动力电站,所述监控平台为钻机水下本体的水面控制中心,且监控平台由控制面板、控制计算机及显示屏组成,所述控制面板上设有按钮、按键、操作杆,所述控制计算机用于运行水面监控软件,实现指令输出、数据通讯及显示功能。
13.进一步改进在于:所述水下供电单元为钻机水下本体的水面动力中心,通过脐带缆向钻机水下本体提供强电动力,满足电力需求,所述脐带缆为强电动力及控制信号的传输通道,所述钻机水下本体通过脐带接线箱与脐带缆连接。
14.本发明的有益效果为:1、本发明在海底钻进作业中,通过水面监控动力站遥控操作完成,通过脐带缆的连接作用来提供动力和控制信息,便于监测钻机水下本体的所有传感器信息及钻进情况,从而及时调整和操控,可用于沉船整体打捞等海底钻孔及钢缆、管线穿引作业。
15.2、本发明通过摄像头采集作业影像,通过水下等提供光照,通过外围传感器进行距离、深度等一系列监测,配合钻头上的定位传感器进行实时定位,有效提高了沉船千斤穿引的作业效率和成功率,并提高了施工的可靠性。
16.3、本发明采用非开挖钻机的高强度钻杆,顶推力大、破土能力强,在土质强度较高的海底作业时具有明显优势。
附图说明
17.图1为本发明的系统示意图;图2为本发明的主框架、钻机系统示意图;图3为本发明的水下液压系统、补偿系统示意图;图4为本发明的钻机系统组成示意图。
具体实施方式
18.为了加深对本发明的理解,下面将结合实施例对本发明做进一步详述,本实施例仅用于解释本发明,并不构成对本发明保护范围的限定。
19.实施例一根据图1、2、3、4所示,本实施例提出了水下新型接杆式攻泥器系统,包括水面部和钻机水下本体,所述水面部包括水面监控动力站、水下供电单元和泥浆系统,所述水面监控动力站用于监测钻机水下本体的所有传感器信息及钻进情况,所述钻机水下本体包括设置于主框架上的钻机系统、水下液压系统、水下监控系统和补偿系统,所述水下液压系统与钻机系统相连并提供动力,所述补偿系统和水下监控系统固定设置于主框架上;补偿系统用于对钻机系统作业时的误差值进行补偿;所述水面监控动力站和水下供电单元通过脐带缆向钻机水下本体提供动力和控制信息,由水面遥控驱动钻机水下本体完成穿引作业,所述泥浆系统通过绞车软管将水面的高压泥浆传输至钻机水下本体,进行喷射破土。钻机水下本体是攻泥器千斤穿引作业的核心设备,水面监控动力站和水下供电单元通过脐带缆向本体提供动力和控制信息,由本体完成钻杆上杆与连接、钻杆推送、钻头破土及方向控制等,钻头出土并完成钢丝穿引后,完成钻杆回收、钻杆拆卸及复位等作业。使用时,水面部提供动力和监控,钻机水下本体则是攻泥器核心,在海底钻进作业中,通过水面监控动力站遥控操作完成,通过脐带缆的连接作用来提供动力和控制信息,便于监测钻机水下本体的所有传感器信息及钻进情况,从而及时调整和操控,可用于沉船整体打捞等海底钻孔及钢缆、管线穿引作业。
20.所述钻机系统包括:钻机主梁、动力头总成、自动上杆系统、夹持器总成,所述动力头总成设置于钻机主梁上,自带驱动装置沿主梁前后移动,实现钻杆推送与回收;所述自动上杆系统设置于钻机主梁一侧,用于存储钻杆,并配合动力头总成完成钻杆的送杆与收杆;所述夹持器总成固定设置于钻机主梁前端,用于钻杆末端夹持,并与动力总成配合实现钻杆丝扣的连接与拆卸。本发明的钻机系统由钻机主梁、动力头总成、自动上杆系统和夹持器总成组成,通过动力头总成实现钻杆推送与回收,通过自动上杆系统配合动力头总成完成钻杆的储存、送杆与收杆,通过夹持器总成对钻杆末端夹持,并与动力总成配合进行钻杆丝扣的连接与拆卸,上述结构采用非开挖钻机的高强度钻杆,顶推力大、破土能力强,在土质强度较高的海底作业时具有明显优势。
21.所述钻杆上设有钻头,且钻头上设有导航系统,所述导航系统包括定位传感器。本发明通过钻头上的定位传感器进行实时定位,有效提高了沉船千斤穿引的作业效率和成功率,并提高了施工的可靠性。
22.所述水下液压系统由水下液压站、水下阀箱组成,所述水下液压站包括水下电机、液压泵、油箱及过滤模块;所述水下阀箱为控制阀箱。水下液压系统由水下液压站、水下阀箱组成,按驱动要求的流向、压力和流量供油,适用于驱动设备与液压站分离的各种机械上,应用于本装置上,将水下液压系统与钻机系统用油管相连,即可实现各种规定的动作,当液压站在水下使用时,需要工作人员定期检修。
23.所述水下监控系统包括中央控制单元、摄像头、水下灯和外围传感器,所述摄像头和外围传感器的信号输出端连接中央控制单元,且中央控制单元将信号反馈给水面监控动力站。本发明具备水下监控系统和导航系统,通过摄像头采集作业影像,通过水下等提供光照,通过外围传感器进行距离、深度等一系列监测,有效提高了沉船千斤穿引的作业效率和成功率,并提高了施工的可靠性。
24.实施例二
根据图1、2、3、4所示,本实施例提出了水下新型接杆式攻泥器系统,包括水面部和钻机水下本体,所述水面部包括水面监控动力站、水下供电单元和泥浆系统,所述水面监控动力站用于监测钻机水下本体的所有传感器信息及钻进情况,所述钻机水下本体包括设置于主框架上的钻机系统、水下液压系统、水下监控系统和补偿系统,所述水下液压系统与钻机系统相连并提供动力,所述补偿系统和水下监控系统固定设置于主框架上;补偿系统用于对钻机系统作业时的误差值进行补偿;所述水面监控动力站和水下供电单元通过脐带缆向钻机水下本体提供动力和控制信息,由水面遥控驱动钻机水下本体完成穿引作业,所述泥浆系统通过绞车软管将水面的高压泥浆传输至钻机水下本体,进行喷射破土。钻机水下本体是攻泥器千斤穿引作业的核心设备,水面监控动力站和水下供电单元通过脐带缆向本体提供动力和控制信息,由本体完成钻杆上杆与连接、钻杆推送、钻头破土及方向控制等,钻头出土并完成钢丝穿引后,完成钻杆回收、钻杆拆卸及复位等作业。使用时,水面部提供动力和监控,钻机水下本体则是攻泥器核心,在海底钻进作业中,通过水面监控动力站遥控操作完成,通过脐带缆的连接作用来提供动力和控制信息,便于监测钻机水下本体的所有传感器信息及钻进情况,从而及时调整和操控,可用于沉船整体打捞等海底钻孔及钢缆、管线穿引作业。
25.所述泥浆系统包括:高压泥浆泵和储浆罐,所述高压泥浆泵通过发动机驱动运行,所述储浆罐内设有泥浆搅拌系统,所述高压泥浆泵入口与储浆罐出口之间采用软管连接,且高压泥浆泵出口与绞车软管入口连接,所述绞车软管为连接泥浆系统与钻机水下本体的传输通道,用于将水面的高压泥浆传输至钻机水下本体,由钻杆末端进入钻杆内部,最后从钻头处喷射后完成破土。使用时,高压泥浆泵入口与储浆罐出口之间采用软管连接,高压泥浆泵出口与绞车软管入口连接。作业期间,储浆罐向高压泥浆泵提供泥浆或海水,由高压泥浆泵增压后输出高压泥浆或海水;绞车软管被配置为连接泥浆系统与钻机水下本体的传输通道,用于将水面的高压泥浆传输至钻机水下本体,由钻杆末端进入钻杆内部,最后从钻头喷嘴处喷射后完成破土。
26.所述泥浆系统连接有气压恒定系统,作业期间,所述储浆罐向高压泥浆泵提供泥浆或海水,且高压泥浆泵增压后输出高压泥浆或海水,所述气压恒定系统用于恒定控制增压。本发明通过泥浆系统提供高压泥浆,从钻头处喷射后完成破土,配合增设的气压恒定系统,恒定控制高压泥浆的压力,进一步保证作业的可靠性。
27.所述水面监控动力站包括监控平台和动力电站,所述监控平台为钻机水下本体的水面控制中心,且监控平台由控制面板、控制计算机及显示屏组成,所述控制面板上设有按钮、按键、操作杆,所述控制计算机用于运行水面监控软件,实现指令输出、数据通讯及显示功能。方便人机交互,进行操控。
28.所述水下供电单元为钻机水下本体的水面动力中心,通过脐带缆向钻机水下本体提供强电动力,满足电力需求,所述脐带缆为强电动力及控制信号的传输通道,所述钻机水下本体通过脐带接线箱与脐带缆连接。使用时,通过水下供电单元供电,电力通过脐带缆进入脐带接线箱,脐带接线箱给钻机水下本体供电。
29.本发明分为水面部和钻机水下本体两大部分,其中:水面部主要是用于提供动力和监控,钻机水下本体则是攻泥器核心,在海底钻进作业中,通过水面监控动力站遥控操作完成,通过脐带缆的连接作用来提供动力和控制信息,便于监测钻机水下本体的所有传感
器信息及钻进情况,从而及时调整和操控,可用于沉船整体打捞等海底钻孔及钢缆、管线穿引作业。且本发明具备水下监控系统和导航系统,通过摄像头采集作业影像,通过水下等提供光照,通过外围传感器进行距离、深度等一系列监测,配合钻头上的定位传感器进行实时定位,有效提高了沉船千斤穿引的作业效率和成功率,并提高了施工的可靠性。同时,本发明的钻机系统由钻机主梁、动力头总成、自动上杆系统和夹持器总成组成,采用非开挖钻机的高强度钻杆,顶推力大、破土能力强,在土质强度较高的海底作业时具有明显优势。另外,本发明通过泥浆系统提供高压泥浆,从钻头处喷射后完成破土,配合增设的气压恒定系统,恒定控制高压泥浆的压力,进一步保证作业的可靠性。
30.以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1