一种用于大深度水下机器人姿态调整的配重与压铁布局方法
1.本发明涉及水下机器人技术领域,特别涉及一种用于大深度水下机器人姿态调整的配重与压铁布局方法。
背景技术:
2.水下机器人,特别是无缆水下机器人在实际作业时面临多种工况,如起吊、入水,下潜,航行作业,上浮,海面回收。各种工况下,水下机器人载体的配重各有不同,其姿态也不同。水下机器人在水下航行作业时,需要保持良好的姿态,如姿态角度过大,会导致航行阻力增大,传感器失效,甚至通过本身的推进器难以抵消过大的姿态角度,导致潜次的失败。水下机器人起吊时,如果姿态角度过大,会导致水下机器人与潜器底座发生碰撞,难以落位等情况。水下机器人回收至海面,如姿态角度过大,会导致在海面无法航行,通信天线埋没海水无法发出位置信息等。因此需要对水下机器人的水下、起吊姿态进行精准的计算。
技术实现要素:
3.针对上述问题,本发明的目的在于提供一种用于大深度水下机器人姿态调整的配重与压铁布局方法,对水下机器人的水下、起吊姿态进行精准的计算,对于姿态角度过大的,通过配重的布局调整,实现水下机器人水下和起吊时的姿态水平。对于水下机器人海面回收工况,通过对上浮压铁特定位置的布局,实现水下机器人海面回收时的姿态水平。实现对水下机器人水下和起吊姿态的计算以及在海面回收工况下,保证潜器水平时的上浮压铁布局。
4.本发明的目的是通过以下技术方案来实现的:
5.一种用于大深度水下机器人姿态调整的配重与压铁布局方法,结合潜器的布放和回收流程,通过吊钩、配重、压铁布局,实现水下机器人海面回收时姿态水平,水下机器人下潜时减小阻力、提高下潜速度,水下机器人水下运行时和起吊时姿态平稳;包括以下步骤:
6.步骤1、定义水下机器人模型的三维坐标系原点(x0,y0,z0)及方向;
7.步骤2、计算水下机器人的上浮压铁布局位置,使得水下机器人在无动力上浮过程后能平稳浮在预设的海面切割线;
8.步骤3、设计水下机器人的下潜压铁布局位置,计算下潜过程姿态,控制下潜姿态;
9.步骤4、根据水下姿态设计水下机器人在水下运行过程中的预置配重和其布局位置,使得水下机器人在水下运行过程中保持姿态平稳;
10.步骤5、设计布放起吊钩和回收起吊钩的位置,使得布放起吊和回收起吊过程的姿态平稳。
11.所述潜器的布放和回收流程,包括:
12.布放起吊:勾取吊钩,控制布放起吊过程中的姿态角平稳;此时水下机器人吸附上浮压铁与下潜压铁;
13.下潜:水下机器人入水后,上浮压铁与下潜压铁均吸附在水下机器人上,依靠下潜
压铁的重量,无动力下潜至目标深度,抛掉下潜压铁,此时水下机器人重力浮力平衡;
14.水下运行:潜器以平衡姿态执行水下航行任务;
15.上浮:待作业完成,抛掉上浮压铁,水下机器人依靠自身浮力,无动力上浮,直至部分漏出海面;
16.回收起吊:勾取起吊钩,控制回收起吊过程中的姿态角平稳;此时所述上浮压铁与下潜压铁均被抛载。
17.所述上浮压铁位置布局计算的步骤如下:
18.步骤2.1:计算海面回收时,水下机器人的正浮力数值;
19.根据水下机器人系统的不利因素:内部耐压舱漏水造成的失去浮力值、浮力材损坏造成的浮力减少值、光纤缠绕牵引力值,设定由不利因素累加形成的水下机器人的海面正浮力值;
20.步骤2.2:计算水下机器人相对海面线的位置;
21.a.在模型中,通过海面切割水下机器人上部浮力材,模拟水下机器人漏出海面不同高度;
22.b.切割后,将上部浮力材体积换算成浮力,加上漏出海面设备的损失浮力,得到总浮力损失值;所述漏出海面设备包括天线、起吊钩;
23.c.计算不同的切割位置,对应不同的浮力损失值,直至总浮力损失值等于海面正浮力值,从而确定海面切割位置;
24.步骤2.3:计算水下机器人上浮压铁位置;
25.对海面以上的浮力材、天线、设备,计算浮力中心,确定上浮压铁x和z两个方向的坐标位置;所述上浮压铁吸附在潜器底部外侧,上浮压铁y方向的高度位置依据电磁铁、水下机器人框架位置确定。
26.所述下潜压铁位置布局的步骤如下:
27.将下潜压铁布局在水下机器人艏部,水下机器人下潜时,由于下潜压铁靠前,水下机器人带有一定角度下潜,艏部低于艉部,减小下潜迎流面积,从而减小下潜阻力,加大下潜速度。
28.下潜过程中是按照如下计算的姿态角控制水下机器人下潜过程中的姿态:
29.步骤3.1:计算水下机器人下潜过程重心位置(x
c下潜
,y
c下潜
,z
c下潜
);此时水下机器人下潜过程中吸附着下潜压铁和上浮压铁,计算重心包括上浮压铁和下潜压铁;
30.步骤3.2:拟定迎流角度,通过水动力仿真软件,计算当前迎流角度下的压力中心位置(x
p
,y
p
,z
p
);
31.步骤3.3:下潜过程重心与压力中心连线,判断与迎流是否平行,若平行,当前的迎流角度即为水下机器人下潜过程中的姿态角,否则返回步骤3.1重新计算;所述计算的姿态角用于控制水下机器人下潜过程中的姿态。
32.所述水下姿态计算步骤如下:
33.步骤4.1a:定义水下机器人的配重位置和质量;所述配重为单一配重或不同配重的组合;
34.步骤4.1b:计算浮心坐标(xf,yf,zf);
35.式中,x
fi
,y
fi
,z
fi
为第i个计重件的形心位置坐标值,vi为第i个计重件的排水体积;此时水下机器人搭载上浮压铁,抛掉下潜压铁;所述计重件不包括下潜压铁,包括潜器上的各个零部件、配重、上浮压铁;各个零部件的位置、质量已知;
36.步骤4.1c:计算水下机器人的水下航行重心位置(x
c水下航行
,y
c水下航行
,z
c水下航行
);此时水下机器人搭载上浮压铁、抛掉下潜压铁,计算重心不包括下潜压铁,包括潜器上的各个零部件、配重、上浮压铁;
37.步骤4.1d:计算水下机器人在水下俯仰角水下横滚角所述水下运行过程是按照该俯仰角和横滚角控制机器人的水下运行姿态。
38.所述调整潜器在水下运行过程中的预置配重和其布局位置,包括:
39.步骤4.2:判断水下俯仰角θ
水下俯仰角
是否满足设定的阈值范围要求,若是则输出当前的配重位置和质量,否则返回步骤4.1a重新计算。
40.所述布放起吊姿态计算步骤如下:
41.步骤5.1a:计算水下机器人布放起吊的重心位置坐标(x
c布放起吊
,y
c布放起吊
,z
c布放起吊
);布放起吊时,水下机器人上吸附有上浮和下潜压铁,计算重心包括潜器上的各个零部件、配重、上浮压铁和下潜压铁;各个零部件的位置、质量已知;
42.步骤5.1b:定义布放吊钩取吊点位置,根据原点位置,量取吊点坐标(x
d布放吊点
,y
d布放吊点
,z
d布放吊点
);
43.步骤5.1c:计算布放起吊后,水下机器人的起吊俯仰角步骤5.1c:计算布放起吊后,水下机器人的起吊俯仰角起吊横滚角所述布放起吊过程是按照该俯仰角和横滚角控制机器人的布放起吊姿态。
44.所述回收起吊姿态计算步骤如下:
45.所述回收起吊姿态计算步骤如下:
46.步骤5.2a:计算水下机器人回收起吊的重心位置坐标(x
c回收起吊
,y
c回收起吊
,z
c回收起吊
);回收起吊时,水下机器人抛掉上浮和下潜压铁,计算重心包括潜器上的各个零部件、配重;各个零部件的位置、质量已知;
47.步骤5.2b:定义回收吊钩取吊点位置,根据原点位置,量取吊点坐标(x
d回收吊点
,y
d回收吊点
,z
d回收吊点
);
48.步骤5.2c:计算回收起吊后,水下机器人的起吊俯仰角步骤5.2c:计算回收起吊后,水下机器人的起吊俯仰角起吊横滚角所述回收起吊过程是按照该俯仰角和横滚角控制机器人的回收起吊姿态。
49.所述重心位置坐标(xc,yc,zc)计算公式为:
50.式中,xi,yi,zi为第i个计重件的重心位置,wi为第i个计重件的质量;布放起吊、回收起吊、下潜和水下运行过程中,计重件不相同;是否包括上浮压铁和下潜压铁按照情况确定。
51.本发明的优点与积极效果为:
52.本发明的水下机器人的姿态计算方法适用于大部分水下机器人,其中考虑了多种工况下的姿态,主要包括起吊姿态和水下姿态。通过本文上浮压铁的位置确定方法,可保证水下机器人在海面回收时的姿态水平,下潜压铁的位置布局,减小了下潜阻力,从而加快下潜速度。
附图说明
53.图1为水下机器人在水下时的受力示意图;
54.图2为水下机器人上浮压铁位置示意图;
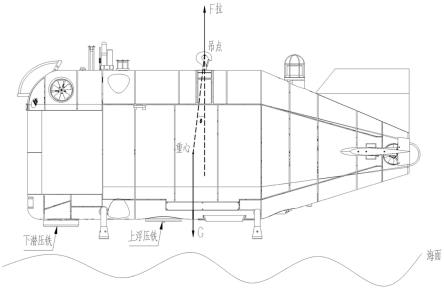
55.图3为水下机器人在起吊时的受力示意图;
具体实施方式
56.为了使本发明的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本发明进行详细描述。
57.水下机器人的工作流程包含以下几个过程:
58.1)布放起吊:勾取吊钩,控制布放起吊过程中的姿态角平稳;此时水下机器人吸附上浮压铁与下潜压铁;
59.2)下潜:水下机器人入水后,上浮压铁与下潜压铁均吸附在水下机器人上,依靠下潜压铁的重量,无动力下潜至目标深度,抛掉下潜压铁,此时水下机器人重力浮力平衡;
60.3)水下运行:潜器以平衡姿态执行水下航行任务;
61.4)上浮:待作业完成,抛掉上浮压铁,水下机器人依靠自身浮力,无动力上浮,直至部分漏出海面;
62.5)回收起吊:勾取起吊钩,控制回收起吊过程中的姿态角平稳;此时所述上浮压铁与下潜压铁均被抛载。
63.结合水下机器人的工作流程,通过吊钩、配重、压铁布局,实现水下机器人海面回收时姿态水平,水下机器人下潜时减小阻力、提高下潜速度,水下机器人水下运行时和起吊时姿态平稳;
64.具体地,包括以下步骤:
65.(一)首先确定原点坐标(x0,y0,z0)及方向;
66.在水下机器人模型中,任意指定原点位置作为后续坐标的基点;
67.(二)上浮压铁位置布局计算的步骤如下:
68.步骤2.1:计算海面回收时,水下机器人的正浮力数值;
69.水下机器人系统出于内部耐压舱漏水失去浮力、浮力材损坏、光纤缠绕等不利因素的考虑,在发生不利因素时,需确保能够依靠自身浮力,安全上浮至海面。依据水下机器人的传统设计,将水下机器人的海面正浮力确定为40kg。
70.步骤2.2:计算水下机器人相对海面线的位置;
71.理想状态,海面为无波浪的水平面,在模型中,通过切割水下机器人上部浮力材,模拟水下机器人漏出海面不同高度。切割后,上部浮力材体积换算成浮力,另加上天线、起吊钩等漏出海面设备的损失浮力,得到总浮力损失值。不同的切割位置,对应不同的浮力损失值,直至总浮力损失值等于40kg,即确定了海面切割位置。
72.步骤2.3:计算水下机器人上浮压铁位置;
73.对海面以上的浮力材、天线、设备等,计算浮力中心,即可确定上浮压铁x和z两个方向的位置,上浮压铁x和z两个方向的坐标位置与计算的浮力中心相同,即以浮力中心x和z两个方向的位置坐标为上浮压铁x和z两个方向的位置坐标。上浮压铁吸附在潜器底部外侧,上浮压铁y方向的高度位置依据电磁铁、水下机器人框架等位置确定,不影响海面回收时的姿态。
74.(三)下潜压铁位置布局的步骤如下:
75.出于压铁安装便利性,减小水下机器下潜阻力,加大下潜速度等考虑,通过以上步骤,将下潜压铁布局在水下机器人艏部,有利于增加水下机器人的下潜速度。水下机器人下潜时,由于下潜压铁靠前,水下机器人带有一定角度下潜,艏部低于艉部,减小了下潜迎流面积,从而减小下潜阻力,加大下潜速度,节省水下机器人下潜至目标深度的时间。其下潜姿态角度的计算通过以下步骤确定:
76.步骤3.1:计算水下机器人下潜过程重心位置(x
c下潜
,y
c下潜
,z
c下潜
);此时水下机器人下潜过程中吸附着下潜压铁和上浮压铁,计算重心包括上浮压铁和下潜压铁;
77.步骤3.2:拟定迎流角度,通过水动力仿真软件,计算当前迎流角度下的压力中心位置(x
p
,y
p
,z
p
);
78.步骤3.3:下潜过程重心与压力中心连线,判断与迎流是否平行,若平行,当前的迎流角度即为水下机器人下潜过程中的姿态角,否则返回步骤3.1重新计算;所述计算的姿态角用于控制水下机器人下潜过程中的姿态。
79.(四)水下姿态计算步骤如下:
80.步骤4.1a:定义水下机器人的配重位置和质量;所述配重为单一配重或不同配重的组合;
81.步骤4.1b:计算浮心坐标(xf,yf,zf);
82.式中,x
fi
,y
fi
,z
fi
为第i个计重件的形心位置坐标值,vi为第i个计重件的排水体积;此时水下机器人搭载上浮压铁,抛掉下潜压铁;所述计重件不包括下潜压铁,包括潜器上的各个零部件、配重、上浮压铁;各个零部件的位置、质量已知;
83.步骤4.1c:计算水下机器人的水下航行重心位置(x
c水下航行
,y
c水下航行
,z
c水下航行
);此时水下机器人搭载上浮压铁、抛掉下潜压铁,计算重心不包括下潜压铁,包括潜器上的各个零部件、配重、上浮压铁;
84.步骤4.1d:计算水下机器人在水下俯仰角水下横滚角
所述水下运行过程是按照该俯仰角和横滚角控制机器人的水下运行姿态。
85.步骤4.2:判断水下俯仰角θ
水下俯仰角
是否满足设定的阈值范围要求,若是则输出当前的配重位置和质量,否则返回步骤4.1a重新计算
86.(五)布放起吊姿态计算步骤如下:
87.步骤5.1a:计算水下机器人布放起吊的重心位置坐标(x
c布放起吊
,y
c布放起吊
,z
c布放起吊
);布放起吊时,水下机器人上吸附有上浮和下潜压铁,计算重心包括潜器上的各个零部件、配重、上浮压铁和下潜压铁;各个零部件的位置、质量已知;
88.步骤5.1b:定义布放吊钩取吊点位置,根据原点位置,量取吊点坐标(x
d布放吊点
,y
d布放吊点
,z
d布放吊点
);
89.步骤5.1c:计算布放起吊后,水下机器人的起吊俯仰角步骤5.1c:计算布放起吊后,水下机器人的起吊俯仰角起吊横滚角所述布放起吊过程是按照该俯仰角和横滚角控制机器人的布放起吊姿态。
90.回收起吊姿态计算步骤如下:
91.步骤5.2a:计算水下机器人回收起吊的重心位置坐标(x
c回收起吊
,y
c回收起吊
,z
c回收起吊
);回收起吊时,水下机器人抛掉上浮和下潜压铁,计算重心包括潜器上的各个零部件、配重;各个零部件的位置、质量已知;
92.步骤5.2b:定义回收吊钩取吊点位置,根据原点位置,量取吊点坐标(x
d回收吊点
,y
d回收吊点
,z
d回收吊点
);
93.步骤5.2c:计算回收起吊后,水下机器人的起吊俯仰角步骤5.2c:计算回收起吊后,水下机器人的起吊俯仰角起吊横滚角所述回收起吊过程是按照该俯仰角和横滚角控制机器人的回收起吊姿态。
94.上文所述的重心位置的计算步骤如下:
95.重心坐标为(xc,yc,zc),其中,xi,yi,zi为第i个计重件的重心位置,wi为第i个计重件的质量;布放起吊、回收起吊、下潜和水下运行过程中,计重件不相同;是否包括上浮压铁和下潜压铁按照情况确定。
96.水下机器人在实际工作时,面临多种工况,各种工况下,水下机器人的配重要求、压铁吸附状态有所不同,导致其姿态有所不同。水下机器人在水下、起吊、水面回收时需尽量保证水平,通过以上步骤,可以得到各工况下的姿态角度,如果姿态角度过大,需要在特定位置调整配重并重新计算,直至计算的姿态角度满足要求。综上,本发明给出了一种大深度水下机器人的姿态计算与压铁布局,为水下机器人的姿态确定和调整提供了理论和计算依据。
97.以上所述仅为本发明的实施方式,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所作的任何修改、等同替换、改进、扩展等,均包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1